Table of Contents
Advertisement
Quick Links
-7-Series AC Servo Drive
-7S SERVOPACK with
Analog Voltage/Pulse Train References
Product Manual
Model: SGD7S
MANUAL NO. SIEP S800001 26B
Basic Information on
SERVOPACKs
Selecting a SERVOPACK
SERVOPACK Installation
Wiring and Connecting
SERVOPACKs
Basic Functions That Require
Setting before Operation
Application Functions
Trial Operation and
Actual Operation
Tuning
Monitoring
Fully-closed Loop Control
Safety Functions
Maintenance
Panel Displays and
Panel Operator Procedures
Parameter Lists
Appendices
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Advertisement
Table of Contents
Troubleshooting

Related Manuals for YASKAWA E-7-Series SGD7S















Summary of Contents for YASKAWA E-7-Series SGD7S
- Page 1 -7-Series AC Servo Drive -7S SERVOPACK with Analog Voltage/Pulse Train References Product Manual Model: SGD7S Basic Information on SERVOPACKs Selecting a SERVOPACK SERVOPACK Installation Wiring and Connecting SERVOPACKs Basic Functions That Require Setting before Operation Application Functions Trial Operation and Actual Operation Tuning Monitoring...
- Page 2 Yaskawa. No patent liability is assumed with respect to the use of the informa- tion contained herein. Moreover, because Yaskawa is constantly striving to improve its high-quality products, the information contained in this manual is sub- ject to change without notice.
- Page 3 About this Manual This manual provides information required to select Σ-7S SERVOPACKs with Analog Voltage/Pulse Train References for Σ-7-Series AC Servo Drives, and to design, perform trial operation of, tune, operate, and maintain the Servo Drives. Read and understand this manual to ensure correct usage of the Σ-7-Series AC Servo Drives. Keep this manual in a safe place so that it can be referred to whenever necessary.
- Page 4 Related Documents The relationships between the documents that are related to the Servo Drives are shown in the following figure. The numbers in the figure correspond to the numbers in the table on the following pages. Refer to these documents as required. System Components Machine Controllers...
- Page 5 Classification Document Name Document No. Description Provides detailed information Machine Controller Machine Controller and Servo required to select MP3000-Series KAEP S800001 22 Machine Controllers and Σ-7-Series and Servo Drive Drive Solutions Catalog General Catalog AC Servo Drives. Provides detailed information on ...
- Page 6 Continued from previous page. Classification Document Name Document No. Description Σ-7-Series AC Servo Drive Provides detailed information on MECHATROLINK-II the MECHATROLINK-II communi- SIEP S800001 30 Communications cations commands that are used for a Σ-7-Series Servo System. Command Manual Σ-7-Series MECHATROLINK Σ-7-Series AC Servo Drive Communications Provides detailed information on...
- Page 7 Using This Manual Technical Terms Used in This Manual The following terms are used in this manual. Term Meaning A Σ-7-Series Rotary Servomotor, Direct Drive Servomotor, or Linear Servomotor. Servomotor A generic term used for a Σ-7-Series Rotary Servomotor (SGM7A, SGM7J, or SGM7G) or a Rotary Servomotor Direct Drive Servomotor (SGMCS or SGMCV).
- Page 8 Notation Used in this Manual Notation for Reverse Signals The names of reverse signals (i.e., ones that are valid when low) are written with a forward slash (/) before the signal abbreviation. Notation Example BK is written as /BK. ...
- Page 9 Trademarks • QR code is a trademark of Denso Wave Inc. • Other product names and company names are the trademarks or registered trademarks of the respective company. “TM” and the ® mark do not appear with product or company names in this manual.
- Page 10 Safety Precautions Safety Information To prevent personal injury and equipment damage in advance, the following signal words are used to indicate safety precautions in this document. The signal words are used to classify the hazards and the degree of damage or injury that may occur if a product is used incorrectly. Information marked as shown below is important for safety.
- Page 11 Safety Precautions That Must Always Be Observed General Precautions DANGER Read and understand this manual to ensure the safe usage of the product. Keep this manual in a safe, convenient place so that it can be referred to whenever necessary. Make sure that it is delivered to the final user of the product.
- Page 12 NOTICE Do not attempt to use a SERVOPACK or Servomotor that is damaged or that has missing parts. Install external emergency stop circuits that shut OFF the power supply and stops operation immediately when an error occurs. In locations with poor power supply conditions, install the necessary protective devices (such as AC reactors) to ensure that the input power is supplied within the specified voltage range.
- Page 13 NOTICE Do not hold onto the front cover or connectors when you move a SERVOPACK. There is a risk of the SERVOPACK falling. A SERVOPACK or Servomotor is a precision device. Do not drop it or subject it to strong shock. There is a risk of failure or damage.
- Page 14 NOTICE Do not install or store the product in any of the following locations. • Locations that are subject to direct sunlight • Locations that are subject to ambient temperatures that exceed product specifications • Locations that are subject to relative humidities that exceed product specifications •...
- Page 15 Whenever possible, use the Cables specified by Yaskawa. If you use any other cables, confirm the rated current and application environment of your model and use the wiring materials specified by Yaskawa or equivalent materials. Securely tighten cable connector screws and lock mechanisms.
- Page 16 Operation Precautions WARNING Before starting operation with a machine connected, change the settings of the switches and parameters to match the machine. Unexpected machine operation, failure, or personal injury may occur if operation is started before appropriate settings are made. ...
- Page 17 NOTICE When you adjust the gain during system commissioning, use a measuring instrument to monitor the torque waveform and speed waveform and confirm that there is no vibration. If a high gain causes vibration, the Servomotor will be damaged quickly. ...
- Page 18 We will update the document number of the document and issue revisions when changes are made. Any and all quality guarantees provided by Yaskawa are null and void if the customer modifies the product in any way. Yaskawa disavows any responsibility for damages or losses that are caused by modified products.
- Page 19 • Events for which Yaskawa is not responsible, such as natural or human-made disasters Limitations of Liability • Yaskawa shall in no event be responsible for any damage or loss of opportunity to the customer that arises due to failure of the delivered product.
- Page 20 • It is the customer’s responsibility to confirm conformity with any standards, codes, or regulations that apply if the Yaskawa product is used in combination with any other products. • The customer must confirm that the Yaskawa product is suitable for the systems, machines, and equipment used by the customer.
-
Page 21: Servopacks
Compliance with UL Standards, EU Directives, and Other Safety Standards Certification marks for the standards for which the product has been certified by certification bodies are shown on nameplate. Products that do not have the marks are not certified for the standards. ... - Page 22 Only the SGMCV is certified. Certification is scheduled for April 2015. Note: We declared the CE Marking based on the harmonized standards in the above table. Safety Standards Product Model Safety Standards Standards EN ISO13849-1: 2008/AC: 2009 Safety of Machinery IEC 60204-1 IEC 61508 series SERVOPACKs...
-
Page 23: Table Of Contents
Contents About this Manual..........iii Outline of Manual . - Page 24 SERVOPACK Installation Installation Precautions ....... 3-2 Mounting Types and Orientation ......3-3 Mounting Hole Dimensions .
-
Page 25: Setting Before Operation
4.7.2 Computer Connector (CN7) ........4-43 4.7.3 Analog Monitor Connector (CN5) . - Page 26 5.14 Motor Stopping Methods for Servo OFF and Alarms..5-41 5.14.1 Stopping Method for Servo OFF ....... . .5-41 5.14.2 Servomotor Stopping Method for Alarms .
- Page 27 Torque Control ........6-37 6.7.1 Basic Settings for Torque Control .
- Page 28 6.15.3 Operating Procedure .........6-94 6.15.4 Related Parameters .
- Page 29 Tuning-less Function ....... . 8-11 8.4.1 Application Restrictions ........8-11 8.4.2 Operating Procedure .
- Page 30 8.11.3 Current Control Mode Selection ....... . .8-64 8.11.4 Current Gain Level Setting ........8-64 8.11.5 Speed Detection Method Selection .
- Page 31 Safety Functions 11.1 Introduction to the Safety Functions ....11-3 11.1.1 Safety Functions ..........11-3 11.1.2 Precautions for Safety Functions .
- Page 32 Panel Displays and Panel Operator Procedures 13.1 Panel Operator ........13-3 13.1.1 Panel Operator Key Names and Functions .
- Page 33 Parameter Lists 14.1 List of Parameters ........14-2 14.1.1 Interpreting the Parameter Lists .
- Page 34 Basic Information on SERVOPACKs This chapter provides information required to select SERVOPACKs, such as SERVOPACK models and combi- nations with Servomotors. The Σ-7 Series ..... . . 1-2 Interpreting the Nameplate .
-
Page 35: The Σ-7 Series
1.1 The Σ-7 Series Σ -7 Series The Σ-7-series SERVOPACKs are designed for applications that require frequent high-speed and high-precision positioning. The SERVOPACK will make the most of machine performance in the shortest time possible, thus contributing to improving productivity. The Σ-7-series SERVOPACKs include Σ-7S SERVOPACKs for single-axis control and Σ-7W SERVOPACKs for two-axis control. -
Page 36: Interpreting The Nameplate
1.2 Interpreting the Nameplate Interpreting the Nameplate The following basic information is provided on the nameplate. S_Ana - SERVOPACK model Protection class Surrounding air temperature Order number Serial number... -
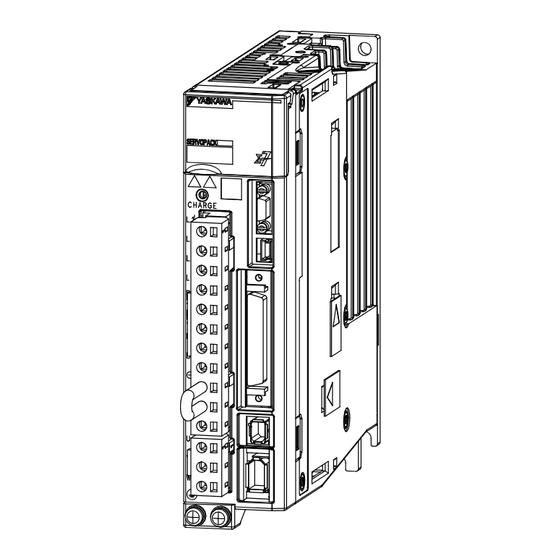
Page 37: Part Names
1.3 Part Names Part Names With Front Cover Open (on side of SERVOPACK) Main circuit terminals S_Analog Motor terminals Name Description Reference − − Front Cover Nameplate Indicates the SERVOPACK model and ratings. page 1-3 − Input Voltage –... - Page 38 1.3 Part Names Name Description Reference Used to display SERVOPACK status, alarm numbers, and Panel Display parameters. page 13-3 Panel Operator Keys Used to set parameters. − Panel Operator Analog Monitor Connector You can use a special cable (peripheral device) to monitor page 4-43 (CN5) the motor speed, torque reference, or other values.
-
Page 39: Model Designations
1.4 Model Designations 1.4.1 Interpreting SERVOPACK Model Numbers Model Designations 1.4.1 Interpreting SERVOPACK Model Numbers SGD7S - R70 S_Analog 1st+2nd+3rd 5th+6th 8th+9th+10th Σ-7-Series digit digit digits digits digits Σ-7S SERVOPACKs Hardware Options Maximum Applicable 1st+2nd+3rd digits 4th digit Voltage 8th+9th+10th digits Motor Capacity Specification Applicable... - Page 40 1.4 Model Designations 1.4.2 Interpreting Servomotor Model Numbers Direct Drive Servomotors SGMC - 02 1st+2nd Series digit digit digit digit digit digits Σ-7 Series Servomotors Series 1st+2nd digits 5th digit Rated Torque Design Revision Order Code Specification 3rd digit 6th digit Servomotor Outer Diameter Flange Specification Small capacity, coreless...
-
Page 41: Combinations Of Servopacks And Servomotors
1.5 Combinations of SERVOPACKs and Servomotors 1.5.1 Combinations of Rotary Servomotors and SERVOPACKs Combinations of SERVOPACKs and Servomotors 1.5.1 Combinations of Rotary Servomotors and SERVOPACKs SERVOPACK Model Rotary Servomotor Model Capacity SGD7S- SGM7A-A5A 50 W R70A SGM7A-01A 100 W R90A SGM7A-C2A 150 W 1R6A... -
Page 42: Combinations Of Linear Servomotors And Servopacks
1.5 Combinations of SERVOPACKs and Servomotors 1.5.3 Combinations of Linear Servomotors and SERVOPACKs Instantaneous SERVOPACK Model Rated Torque Direct Drive Servomotor Model Maximum Torque [N·m] SGD7S- [N·m] SGMCS-45M 7R6A SGMCS-80M 120A Medium Capacity, SGMCS-80N With Core SGMCS-1AM 180A (SGMCS) SGMCS-1EN 200A SGMCS-2ZN SGMCV-04B... -
Page 43: Combinations Of Linear Servomotors And Servopacks
1.5 Combinations of SERVOPACKs and Servomotors 1.5.3 Combinations of Linear Servomotors and SERVOPACKs Instantaneous SERVOPACK Model Rated Torque Linear Servomotor Model Maximum Torque SGD7S- SGLFW-20A090A SGLFW-20A120A 1R6A SGLFW-35A120A SGLFW-35A230A 3R8A SGLFW-50A200B 5R5A SGLFW-50A380B 1200 120A SGLFW-1ZA200B SGLFW-1ZA380B 1120 2400 200A SGLF SGLFW2-30A070A (Models with F-type... -
Page 44: Functions
1.6 Functions Functions This section lists the functions provided by SERVOPACKs. Refer to the reference pages for details on the functions. • Functions Related to the Machine Function Reference Power Supply Type Settings for the Main Circuit page 5-14 and Control Circuit Automatic Detection of Connected Motor page 5-16 Motor Direction Setting... - Page 45 1.6 Functions Function Reference Position Deviation Clear Input (CLR) Signal Func- page 6-30 tion and Settings Reference Pulse Input Multiplication Switching page 6-31 Positioning Completion (/COIN) Signal page 6-33 Near (/NEAR) Signal page 6-35 Reference Pulse Inhibition and Settings page 6-35 Torque Control page 6-37 Basic Settings for Torque Control...
- Page 46 1.6 Functions • Functions for Trial Operation during Setup Function Reference Software Reset page 6-91 Trial Operation of Servomotor without a Load page 7-7 Program Jogging page 7-20 Origin Search page 7-25 Test without a Motor page 7-26 Monitoring Machine Operation Status and Signal page 9-6 Waveforms •...
-
Page 47: Selecting A Servopack
Selecting a SERVOPACK This chapter provides information required to select SERVOPACKs, such as specifications, block diagrams, dimensional drawings, and connection examples. Ratings and Specifications ... . . 2-2 2.1.1 Ratings ....... . 2-2 2.1.2 Specifications . - Page 48 2.1 Ratings and Specifications 2.1.1 Ratings Ratings and Specifications This section gives the ratings and specifications of SERVOPACKs. 2.1.1 Ratings Three-Phase, 200 VAC Model SGD7S- R70A R90A 1R6A 2R8A 3R8A 5R5A 7R6A 120A 180A 200A Maximum Applicable Motor Capacity 0.05 0.75 [kW] Continuous Output Current [Arms]...
-
Page 49: Ratings And Specifications
2.1 Ratings and Specifications 2.1.2 Specifications 2.1.2 Specifications Item Specification Control Method IGBT-based PWM control, sine wave current drive Serial encoder: 20 bits or 24 bits (incremental encoder/absolute With Rotary encoder) Servomotor 22 bits (absolute encoder) • Absolute linear encoder (The signal resolution depends on the abso- Feedback lute linear encoder.) With Linear... -
Page 50: Ratings
2.1 Ratings and Specifications 2.1.2 Specifications Continued from previous page. Item Specification Encoder Divided Phase A, phase B, phase C: Line-driver output Pulse Output Number of divided output pulses: Any setting is allowed. Linear Servomotor Number of input points: 1 Overheat Protection Input voltage range: 0 V to +5 V Signal Input... -
Page 51: Ratings And Specifications
2.1 Ratings and Specifications 2.1.2 Specifications Continued from previous page. Item Specification Digital Operator (JUSP-OP05A-1-E) and personal computer (with Sig- Inter- faces maWin+) RS-422A Communi- Commu- Up to N = 15 stations possible for RS-422A port cations nications (CN3) Axis Communi- Address Set with parameters. -
Page 52: Ratings
2.1 Ratings and Specifications 2.1.2 Specifications Continued from previous page. Item Specification Soft Start Time Set- 0 s to 10 s (Can be set separately for acceleration and deceleration.) ting • Maximum input voltage: ±12 V (forward motor rotation for positive ref- Refer- erence). -
Page 53: Block Diagrams
2.2 Block Diagrams 2.2.1 SGD7S-R70A, -R90A, and -1R6A Block Diagrams 2.2.1 SGD7S-R70A, -R90A, and -1R6A Servomotor Varistor Main circuit power − supply Dynamic brake circuit Voltage Voltage Relay Temperature Gate drive Current Gate drive sensor sensor drive sensor overcurrent protection sensor Varistor Control... -
Page 54: Sgd7S-3R8A, -5R5A, And -7R6A
2.2 Block Diagrams 2.2.3 SGD7S-3R8A, -5R5A, and -7R6A 2.2.3 SGD7S-3R8A, -5R5A, and -7R6A S_Analog Servomotor Varistor Main circuit − power supply Dynamic brake circuit Voltage Relay Temperature Gate drive Current Voltage Gate drive sensor drive sensor overcurrent protection sensor sensor Varistor Control Control... -
Page 55: Sgd7S-120A
2.2 Block Diagrams 2.2.4 SGD7S-120A 2.2.4 SGD7S-120A S_Analog Servomotor Varistor Main circuit − power supply Overheat/ Dynamic overcurrent brake circuit protection Relay Current Voltage Voltage Temperature Gate drive Gate drive drive sensor sensor sensor sensor Varistor Control Analog monitor Analog Control voltage power... -
Page 56: Sgd7S-180A And -200A
2.2 Block Diagrams 2.2.5 SGD7S-180A and -200A 2.2.5 SGD7S-180A and -200A S_Analog Servomotor Varistor Main circuit − power supply Overheat/overcurrent Dynamic protection brake circuit Voltage Voltage Relay Temperature Current Gate drive sensor sensor sensor drive sensor Varistor Control Analog Analog monitor Control voltage power... -
Page 57: External Dimensions
2.3 External Dimensions 2.3.1 Front Cover Dimensions and Connector Specifications External Dimensions 2.3.1 Front Cover Dimensions and Connector Specifications The front cover dimensions and panel connector section are the same for all models. Refer to the following figures and table. •... - Page 58 2.3 External Dimensions 2.3.2 SERVOPACK External Dimensions • Three-phase, 200 VAC: SGD7S-2R8A 2×M4 Exterior 20 ±0.5 (mounting pitch) Ground terminals (75) 2 × M4 Mounting Hole Diagram S_Analog Approx. mass: 1.0 kg Unit: mm • Three-phase, 200 VAC: SGD7S-3R8A, -5R5A, and -7R6A 3×M4 Exterior 58 ±0.5 (mounting pitch)
- Page 59 2.3 External Dimensions 2.3.2 SERVOPACK External Dimensions • Three-phase, 200 VAC: SGD7S-180A and -200A 3×M4 Exterior Terminals 75 ±0.5 (mounting pitch) Ground 14 × M4 12.5 82.5 ±0.5 (mounting pitch) terminals (75) 2 × M4 Terminal Details Mounting Hole Diagram S_Analog Approx.
-
Page 60: Examples Of Standard Connections Between Servopacks And Peripheral Devices
Rotary Servomotor External Regenerative Resistors are not provided by Yaskawa. The power supply for the holding brake is not provided by Yaskawa. Select a power supply based on the hold- ing brake specifications. If you use a 24-V brake, install a separate power supply for the 24-VDC power supply from other power sup- plies, such as the one for the I/O signals of the CN1 connector. - Page 61 I/O Signal Cable External External Regenerative Regenerative * Resistor Cable Resistor Safety Function Device Cable Serial Converter Unit Cable Serial Converter Unit Ground cable Sensor Cable Linear Encoder Cable Linear encoder Linear Servomotor External Regenerative Resistors are not provided by Yaskawa. 2-15...
-
Page 62: Servopack Installation
SERVOPACK Installation This chapter provides information on installing SERVO- PACKs in the required locations. Installation Precautions ....3-2 Mounting Types and Orientation ..3-3 Mounting Hole Dimensions . -
Page 63: Installation Precautions
3.1 Installation Precautions Installation Precautions Refer to the following section for the ambient installation conditions. 2.1.2 Specifications on page 2-3 Installation Near Sources of Heat Implement measures to prevent temperature increases caused by radiant or convection heat from heat sources so that the ambient temperature of the SERVOPACK meets the ambient conditions. -
Page 64: Mounting Types And Orientation
3.2 Mounting Types and Orientation Mounting Types and Orientation The SERVOPACKs come in the following mounting types: base-mounted, rack-mounted, and duct-ventilated types. Regardless of the mounting type, mount the SERVOPACK vertically, as shown in the following figures. Also, mount the SERVOPACK so that the front panel is facing toward the operator. Note: Prepare two to four mounting holes for the SERVOPACK and mount it securely in the mounting holes. -
Page 65: Mounting Hole Dimensions
3.3 Mounting Hole Dimensions Mounting Hole Dimensions Use mounting holes to securely mount the SERVOPACK to the mounting surface. Note: To mount the SERVOPACK, you will need to prepare a screwdriver that is longer than the depth of the SER- VOPACK. -
Page 66: Mounting Interval
3.4 Mounting Interval 3.4.1 Installing One SERVOPACK in a Control Panel Mounting Interval 3.4.1 Installing One SERVOPACK in a Control Panel Provide the following spaces around the SERVOPACK. 40 mm min. 30 mm min. 30 mm min. 40 mm min. For this dimension, ignore items protruding from the main body of the SERVOPACK. -
Page 67: Monitoring The Installation Environment
3.5 Monitoring the Installation Environment Monitoring the Installation Environment You can use the SERVOPACK Installation Environment Monitor parameter to check the operat- ing conditions of the SERVOPACK in the installation environment. You can check the SERVOPACK installation environment monitor with either of the following methods. -
Page 68: Derating Specifications
3.6 Derating Specifications Derating Specifications If you use the SERVOPACK at a surrounding air temperature of 55°C to 60°C or at an altitude of 1,000 m to 2,000 m, you must apply the derating rates given in the following graphs. •... -
Page 69: Emc Installation Conditions
The EMC installation conditions that are given here are the conditions that were used to pass testing criteria at Yaskawa. The EMC level may change under other conditions, such as the actual installation structure and wiring conditions. These Yaskawa products are designed to be built into equipment. -
Page 70: Wiring And Connecting Servopacks
Wiring and Connecting SERVOPACKs This chapter provides information on wiring and connecting SERVOPACKs to power supplies and peripheral devices. Wiring and Connecting SERVOPACKs ..4-3 4.1.1 General Precautions ..... . 4-3 4.1.2 Countermeasures against Noise . - Page 71 Connecting Safety Function Signals ..4-41 4.6.1 Pin Arrangement of Safety Function Signals (CN8) . . 4-41 4.6.2 I/O Circuits ......4-41 Connecting the Other Connectors .
-
Page 72: Wiring And Connecting Servopacks
4.1 Wiring and Connecting SERVOPACKs 4.1.1 General Precautions Wiring and Connecting SERVOPACKs 4.1.1 General Precautions DANGER Do not change any wiring while power is being supplied. There is a risk of electric shock or injury. WARNING Wiring and inspections must be performed only by qualified engineers. There is a risk of electric shock or product failure. - Page 73 To ensure safe, stable application of the servo system, observe the following precautions when wiring. • Use the cables specified by Yaskawa. Design and arrange the system so that each cable is as short as possible. Refer to the following manual for information on the specified cables.
-
Page 74: Countermeasures Against Noise
4.1 Wiring and Connecting SERVOPACKs 4.1.2 Countermeasures against Noise 4.1.2 Countermeasures against Noise The SERVOPACK is designed as an industrial device. It therefore provides no measures to pre- vent radio interference. The SERVOPACK uses high-speed switching elements in the main circuit. Therefore peripheral devices may be affected by switching noise. - Page 75 4.1 Wiring and Connecting SERVOPACKs 4.1.2 Countermeasures against Noise Noise Filters You must attach Noise Filters in appropriate places to protect the SERVOPACK from the adverse effects of noise. The following is an example of wiring for countermeasures against noise. SERVOPACK Noise Filter Servomotor...
- Page 76 4.1 Wiring and Connecting SERVOPACKs 4.1.2 Countermeasures against Noise Noise Filter Wiring and Connection Precautions Always observe the following precautions when wiring or connecting Noise Filters. • Separate input lines from output lines. Do not place input lines and output lines in the same duct or bundle them together.
-
Page 77: Grounding
4.1 Wiring and Connecting SERVOPACKs 4.1.3 Grounding • If a Noise Filter is located inside a control panel, first connect the Noise Filter ground wire and the ground wires from other devices inside the control panel to the grounding plate for the control panel, then ground the plate. -
Page 78: Basic Wiring Diagrams
4.2 Basic Wiring Diagrams Basic Wiring Diagrams This section provide the basic wiring diagrams. Refer to the reference sections given in the diagrams for details. SERVOPACK S_Analog R S T Main circuit Motor terminals terminals 4.4 Wiring Ser- 1FLT vomotors on page 4-19 PG5V PG0V... - Page 79 You can enable this function with a parameter setting. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Refer to the following chapter if you use a safety function device.
-
Page 80: Wiring The Power Supply To The Servopack
4.3 Wiring the Power Supply to the SERVOPACK 4.3.1 Terminal Symbols and Terminal Names Wiring the Power Supply to the SERVOPACK 4.3.1 Terminal Symbols and Terminal Names Use the main circuit connector on the SERVOPACK to wire the main circuit power supply and control circuit power supply to the SERVOPACK. -
Page 81: Wiring Procedure For Main Circuit Connector
4.3 Wiring the Power Supply to the SERVOPACK 4.3.2 Wiring Procedure for Main Circuit Connector Continued from previous page. Terminal Terminal Name Specifications and Reference Symbols 4.3.5 Wiring Regenerative Resistors on page 4-17 For SGD7S-R70A, -R90A, -1R6A, and -2R8A If the regenerative capacity is insufficient, connect an Exter- nal Regenerative Resistor between B1/ and B2. -
Page 82: Power On Sequence
4.3 Wiring the Power Supply to the SERVOPACK 4.3.3 Power ON Sequence Remove the main circuit connector and motor connector from the SERVOPACK. S_Analog Enlarged View 1. Press in on the lock. 2. Press in on the locks to remove Main circuit the connectors. -
Page 83: Power Supply Wiring Diagrams
4.3 Wiring the Power Supply to the SERVOPACK 4.3.4 Power Supply Wiring Diagrams Power ON Control power supply Main circuit power supply Servo Alarm (ALM) Alarm Alarm cleared. output signal Up to 5.0 s • Design the power ON sequence so that main circuit power supply is turned OFF when an ALM (Servo Alarm) signal is output. - Page 84 4.3 Wiring the Power Supply to the SERVOPACK 4.3.4 Power Supply Wiring Diagrams • Wiring Example for Single-Phase, 200-VAC Power Supply Input S_Analog SERVOPACK 1FLT +24 V (For servo alarm display) − Servo power Servo power 1QF: Molded-case circuit breaker 1Ry: Relay 1FLT: Noise Filter 1PL: Indicator lamp...
- Page 85 4.3 Wiring the Power Supply to the SERVOPACK 4.3.4 Power Supply Wiring Diagrams Using More Than One SERVOPACK Connect the ALM (Servo Alarm) output for these SERVOPACKs in series to operate the alarm detection relay (1RY). When a SERVOPACK alarm is activated, the ALM output signal transistor turns OFF. The following diagram shows the wiring to stop all of the Servomotors when there is an alarm for any one SERVOPACK.
-
Page 86: Wiring Regenerative Resistors
4.3 Wiring the Power Supply to the SERVOPACK 4.3.5 Wiring Regenerative Resistors 4.3.5 Wiring Regenerative Resistors This section describes how to connect External Regenerative Resistors. Refer to the following manual to select External Regenerative Resistors. Σ-7-Series Peripheral Device Selection Manual (Manual No.: SIEP S800001 32) WARNING ... -
Page 87: Wiring Dc Reactors
4.3 Wiring the Power Supply to the SERVOPACK 4.3.6 Wiring DC Reactors Connect the External Regenerative Resistor between the B1/⊕ and B2 terminals. Enlarged View S_Analog Set Pn600 (Regenerative Resistor Capacity) and Pn603 (Regenerative Resistor Resis- tance). Refer to the following section for details on the settings. 5.19 Setting the Regenerative Resistor Capacity on page 5-57 4.3.6 Wiring DC Reactors... -
Page 88: Wiring Servomotors
4.4 Wiring Servomotors 4.4.1 Terminal Symbols and Terminal Names Wiring Servomotors 4.4.1 Terminal Symbols and Terminal Names The SERVOPACK terminals or connectors that are required to connect the SERVOPACK to a Servomotor are given below. Terminal/Connector Terminal/Connector Name Remarks Symbols Refer to the following section for the wiring proce- dure. -
Page 89: Wiring The Servopack To The Encoder
4.4 Wiring Servomotors 4.4.3 Wiring the SERVOPACK to the Encoder 4.4.3 Wiring the SERVOPACK to the Encoder When Using an Absolute Encoder If you use an absolute encoder, use an Encoder Cable with a JUSP-BA01-E Battery Case or install a battery on the host controller. Refer to the following section for the battery replacement procedure. - Page 90 4.4 Wiring Servomotors 4.4.3 Wiring the SERVOPACK to the Encoder When Using an Incremental Encoder SERVOPACK Incremental encoder PG5V PG0V Connector shell (Shell) Shield The incremental encoder pin numbers for wiring the connector depend on the Servomotor that you use. represents a shielded twisted-pair cable.
- Page 91 4.4 Wiring Servomotors 4.4.3 Wiring the SERVOPACK to the Encoder Connections to Absolute Linear Encoder from Magnescale Co., Ltd. SR77 and SR87 Absolute linear encoder from Magnescale Co., Ltd. SERVOPACK PG5V PG0V Connector Connector shell shell Shield represents a shielded twisted-pair cable. 4-22...
- Page 92 4.4 Wiring Servomotors 4.4.3 Wiring the SERVOPACK to the Encoder When Using an Incremental Linear Encoder The wiring depends on the manufacturer of the linear encoder. Connections to Linear Encoder from Heidenhain Corporation Linear encoder from Heidenhain Corporation Serial Converter Unit SERVOPACK /COS /SIN...
- Page 93 4.4 Wiring Servomotors 4.4.3 Wiring the SERVOPACK to the Encoder Connections to Linear Encoder from Magnescale Co., Ltd. If you use a linear encoder from Magnescale Co., Ltd., the wiring will depend on the model of the linear encoder. ...
-
Page 94: Wiring The Servopack To The Holding Brake
4.4 Wiring Servomotors 4.4.4 Wiring the SERVOPACK to the Holding Brake SL700, SL710, SL720, and SL730 • MJ620-T13 Interpolator Linear encoder Interpolator SERVOPACK Head Cable from Magnescale Co., Ltd. 12, 14, 16 PG0V +5 V Connector Connector External power supply shell shell Shield... - Page 95 4.4 Wiring Servomotors 4.4.4 Wiring the SERVOPACK to the Holding Brake Servomotor with SERVOPACK Holding Brake Power supply +24 V BK-RY (/BK+) Surge Absorber (/BK-) DC side Brake power supply BK-RY BK-RY: Brake control relay 1D: Flywheel diode Install the surge absorber near the brake terminals on the Servomotor. 4-26...
-
Page 96: I/O Signal Connections
Allowable voltage range: 24 VDC ±20% − +24VIN Signal Power Supply Input The 24-VDC power supply is not provided by Yaskawa. Absolute Data page 6-70 Inputs the position data request signal for 4 (2) Request Input an absolute encoder. - Page 97 4.5 I/O Signal Connections 4.5.1 I/O Signal Connector (CN1) Names and Functions Control Reference Signal Name Function Method Page PULS Pulse Reference One of the following input pulse forms is set. /PULS Input • Sign + pulse train page 6-28 •...
- Page 98 4.5 I/O Signal Connections 4.5.1 I/O Signal Connector (CN1) Names and Functions Output Signals Default settings are given in parentheses. Control Reference Signal Pin No. Name Function Method Page ALM+ Servo Alarm Turns OFF (opens) when an error is page 6-8 Output detected.
-
Page 99: I/O Signal Connector (Cn1) Pin Arrangement
4.5 I/O Signal Connections 4.5.2 I/O Signal Connector (CN1) Pin Arrangement 4.5.2 I/O Signal Connector (CN1) Pin Arrangement The following figure gives the pin arrangement of the of the I/O signal connector (CN1) for the default settings. General- Signal /SO1- purpose General- Ground... -
Page 100: I/O Signal Wiring Examples
You can enable this function with a parameter setting. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Always use line receivers to receive the output signals. - Page 101 Connect these when using an absolute linear encoder. You can enable this function with a parameter setting. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Always use line receivers to receive the output signals.
- Page 102 Connect these when using an absolute encoder. If the Encoder Cable with a Battery Case is connected, do not connect a backup battery. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation.
- Page 103 Frame ground represents twisted-pair wires. Connect when using an absolute linear encoder. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Always use line receivers to receive the output signals.
- Page 104 You can enable this function with a parameter setting. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Always use line receivers to receive the output signals.
- Page 105 Connect when using an absolute linear encoder. You can enable this function with a parameter setting. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or reinforced insulation. Always use line receivers to receive the output signals.
-
Page 106: I/O Circuits
4.5 I/O Signal Connections 4.5.4 I/O Circuits 4.5.4 I/O Circuits Reference Input Circuits Analog Input Circuits This section describes CN1 connector terminals 5-6 (Speed Reference Input) and 9-10 (Torque Reference Input). The analog signals are used as either speed or torque reference signals. The input impedance is as follows: •... - Page 107 4.5 I/O Signal Connections 4.5.4 I/O Circuits • Precaution When Host Controller Uses Open-Collector Output with User-Supplied Power Sup- The SERVOPACK may fail depending on the relationship between the pull-up voltage (Vcc) and Important the pull-up resistance (R1). Before you wire the circuits, confirm that the specifications of the host controller satisfy the values shown in the following table.
- Page 108 4.5 I/O Signal Connections 4.5.4 I/O Circuits Sink Circuits Source Circuits 24 V 24 V − − SERVOPACK input side SERVOPACK input side Photocoupler Photocoupler Internal Internal signal signal Switch Switch level level Photocoupler Photocoupler Internal Internal signal signal Switch Switch level level...
- Page 109 4.5 I/O Signal Connections 4.5.4 I/O Circuits Photocoupler Output Circuits Photocoupler output circuits are used for the ALM (Servo Alarm), /S-RDY (Servo Ready), and other sequence output signals. Connect a photocoupler output circuit to a relay or line-receiver circuit. Example for Relay Circuit Example for Line-Receiver Circuit SERVOPACK...
-
Page 110: Connecting Safety Function Signals
4.6 Connecting Safety Function Signals 4.6.1 Pin Arrangement of Safety Function Signals (CN8) Connecting Safety Function Signals This section describes the wiring required to use a safety function. Refer to the following chapter for details on the safety function. Chapter 11 Safety Functions 4.6.1 Pin Arrangement of Safety Function Signals (CN8) Pin No. - Page 111 4.6 Connecting Safety Function Signals 4.6.2 I/O Circuits Input (HWBB) Signal Specifications Connector Type Signal Status Meaning Pin No. ON (closed) Does not activate the HWBB (normal operation). CN8-4 /HWBB1 Activates the HWBB (motor current shut-OFF CN8-3 OFF (open) request).
-
Page 112: Connecting The Other Connectors
Measuring probe Black Probe ground The measuring instrument is not provided by Yaskawa. Refer to the following section for information on the monitoring methods for an analog monitor. 9.3 Monitoring Machine Operation Status and Signal Waveforms on page 9-6 4-43... - Page 113 Basic Functions That Require Setting before Operation This chapter describes the basic functions that must be set before you start servo system operation. It also describes the setting methods. Manipulating Parameters (Pn) ..5-4 5.1.1 Parameter Classification .
- Page 114 Selecting the Phase Sequence for a Linear Servomotor . 5-24 5.10 Polarity Sensor Setting ....5-26 5.11 Polarity Detection ....5-27 5.11.1 Restrictions .
- Page 115 5.19 Setting the Regenerative Resistor Capacity . . . 5-57...
-
Page 116: Manipulating Parameters (Pn)
5.1 Manipulating Parameters (Pn) 5.1.1 Parameter Classification Manipulating Parameters (Pn) This section describes the classifications, notation, and setting methods for the parameters given in this manual. 5.1.1 Parameter Classification There are the following two types of SERVOPACK parameters. Classification Meaning Parameters for the basic settings that are Setup Parameters required for operation. -
Page 117: Notation For Parameters
5.1 Manipulating Parameters (Pn) 5.1.2 Notation for Parameters Tuning Parameters Normally the user does not need to set the tuning parameters individually. Use the various SigmaWin+ tuning functions to set the related tuning parameters to increase the response even further for the conditions of your machine. Refer to the following sections for details. 8.6 Autotuning without Host Reference on page 8-23 8.7 Autotuning with a Host Reference on page 8-35 8.8 Custom Tuning on page 8-42... -
Page 118: Parameter Setting Methods
5.1 Manipulating Parameters (Pn) 5.1.3 Parameter Setting Methods 5.1.3 Parameter Setting Methods You can use the SigmaWin+, a Digital Operator, or the Panel Operator to set parameters. A sample operating procedure is given below. Setting Parameters with the SigmaWin+ Select Parameters - Edit Parameters from the menu bar of the Main Window of the Sig- maWin+. -
Page 119: Write Prohibition Setting For Parameters
5.1 Manipulating Parameters (Pn) 5.1.4 Write Prohibition Setting for Parameters Click the Write Button. Writing will start. This concludes the procedure to edit the parameter. Proceed to step 7 only when the dialog box shown in step 7 is displayed. Click the OK Button. - Page 120 5.1 Manipulating Parameters (Pn) 5.1.4 Write Prohibition Setting for Parameters Operating Procedure Use the following procedure to prohibit or permit writing parameter settings. Select Setup - Write Prohibited Setting from the menu bar of the Main Window of the SigmaWin+. Press the for the rightmost digit and set one of the following.
- Page 121 5.1 Manipulating Parameters (Pn) 5.1.4 Write Prohibition Setting for Parameters SigmaWin+ Panel Operator or Digital Operator When Writ- ing Is Pro- Reference Menu Bar SigmaWin+ Function Fn No. Utility Function Name hibited Button Name Cannot be Origin Search Fn003 Origin Search page 7-25 executed.
-
Page 122: Initializing Parameter Settings
5.1 Manipulating Parameters (Pn) 5.1.5 Initializing Parameter Settings SigmaWin+ Panel Operator or Digital Operator When Writ- ing Is Pro- Reference Menu Bar SigmaWin+ Function Fn No. Utility Function Name hibited Button Name Cannot be Jogging Fn002 page 7-7 executed. Test Opera- tion Cannot be Program Jogging... - Page 123 5.1 Manipulating Parameters (Pn) 5.1.5 Initializing Parameter Settings Click the Initialize Button. Click the OK Button. Click the Cancel Button to cancel initialization. The Parameter Editing Dialog Box will return. Click the Initialize Button. Click the Cancel Button to cancel initialization. The Parameter Editing Dialog Box will return. Click the OK Button.
- Page 124 5.1 Manipulating Parameters (Pn) 5.1.5 Initializing Parameter Settings Turn the power supply to the SERVOPACK OFF and ON again after the parameter set- tings have been initialized. This concludes the procedure to initialize the parameter settings. 5-12...
-
Page 125: Control Method Selection
5.2 Control Method Selection Control Method Selection You can use the SERVOPACK for speed control, position control, or torque control. You set the control method in Pn000 = n.X (Control Method Selection). Control Method Selection Pn000 = Control Method Outline Reference ... -
Page 126: Power Supply Type Settings For The Main Circuit And Control Circuit
5.3 Power Supply Type Settings for the Main Circuit and Control Circuit 5.3.1 AC Power Supply Input/DC Power Supply Input Setting Power Supply Type Settings for the Main Circuit and Control Circuit A SERVOPACK can operated on either an AC power supply input or DC power supply input to the main and control circuits. -
Page 127: Single-Phase Ac Power Supply Input/Three-Phase Ac Power Supply Input Setting
5.3 Power Supply Type Settings for the Main Circuit and Control Circuit 5.3.2 Single-phase AC Power Supply Input/Three-phase AC Power Supply Input Setting 5.3.2 Single-phase AC Power Supply Input/Three-phase AC Power Supply Input Setting Some models of Three-phase 200-VAC SERVOPACKs can also operate on a single-phase 200-VAC power supply. -
Page 128: Automatic Detection Of Connected Motor
5.4 Automatic Detection of Connected Motor Automatic Detection of Connected Motor You can use a SERVOPACK to operate either a Rotary Servomotor or a Linear Servomotor. If you connect the Servomotor encoder to the CN2 connector on the SERVOPACK, the SER- VOPACK will automatically determine which type of Servomotor is connected. -
Page 129: Functions And Settings For The /S-On (Servo On) Signal
5.5 Functions and Settings for the /S-ON (Servo ON) Signal 5.5.1 Function of the /S-ON (Servo ON) Signal Functions and Settings for the /S-ON (Servo ON) Signal The /S-ON (Servo ON) signal is used to enable Servomotor operation. This section describes the function of and settings for the /S-ON signal. 5.5.1 Function of the /S-ON (Servo ON) Signal Type... -
Page 130: Motor Direction Setting
5.6 Motor Direction Setting Motor Direction Setting You can reverse the direction of Servomotor rotation by changing the setting of Pn000 = n.X (Direction Selection) without changing the polarity of the speed or position reference. This causes the rotation direction of the motor to change, but the polarity of the signals, such as encoder output pulses, output from the SERVOPACK do not change. -
Page 131: Setting The Linear Encoder Pitch
5.7 Setting the Linear Encoder Pitch Setting the Linear Encoder Pitch If you connect a linear encoder to the SERVOPACK through a Serial Converter Unit, you must set the scale pitch of the linear encoder in Pn282. If a Serial Converter Unit is not connected, you do not need to set Pn282. Serial Converter Unit The Serial Converter Unit converts the signal from the linear encoder into a form that can be read by the SERVOPACK. -
Page 132: Writing Linear Servomotor Parameters
5.8 Writing Linear Servomotor Parameters Writing Linear Servomotor Parameters If you connect a linear encoder to the SERVOPACK without going through a Serial Converter Unit, you must use the SigmaWin+ to write the motor parameters to the linear encoder. The motor parameters contain the information that is required by the SERVOPACK to operate the Linear Servomotor. - Page 133 5.8 Writing Linear Servomotor Parameters Operating Procedure Use the following procedure to write the motor parameters to the linear encoder. You can download the motor parameter file to write to the linear encoder from our web site (http://www.e-mechatronics.com/). Select Setup - Motor Parameter Scale Write from the menu bar of the Main Window of the SigmaWin+.
- Page 134 5.8 Writing Linear Servomotor Parameters Confirm that the motor parameter file information that is displayed is suitable for your motor, and then click the Next Button. Displays an exterior view of the motor. Click the image to enlarge it. Click the Cancel Button to cancel writing the motor parameters to the linear encoder. The Main Win- dow will return.
- Page 135 5.8 Writing Linear Servomotor Parameters Click the No Button to cancel writing the motor parameters to the linear encoder. If you click the Yes Button, writing the motor parameter scale will start. Click the Complete Button. Click the OK Button. Turn the power supply to the SERVOPACK OFF and ON again.
-
Page 136: Selecting The Phase Sequence For A Linear Servomotor
5.9 Selecting the Phase Sequence for a Linear Servomotor Selecting the Phase Sequence for a Linear Servomotor You must select the phase sequence of the Linear Servomotor so that the forward direction of the Linear Servomotor is the same as the encoder’s count-up direction. Before you set the Linear Servomotor phase sequence (Pn080 = n.X), check the follow- ing items. - Page 137 5.9 Selecting the Phase Sequence for a Linear Servomotor If the correct value is not displayed for the feedback pulse counter, the following condi- Information tions may exist. Check the situation and correct any problems. • The linear encoder pitch is not correct. If the scale pitch that is set in Pn282 does not agree with the actual scale pitch, the expected number of feedback pulses will not be returned.
-
Page 138: Polarity Sensor Setting
5.10 Polarity Sensor Setting 5.10 Polarity Sensor Setting The polarity sensor detects the polarity of the Servomotor. You must set a parameter to specify whether the Linear Servomotor that is connected to the SERVOPACK has a polarity sensor. Specify whether there is a polarity sensor in Pn080 = n.X (Polarity Sensor Selection). If the Linear Servomotor has a polarity sensor, set Pn080 to n.0 (Use polarity sensor) (default setting). -
Page 139: Polarity Detection
5.11 Polarity Detection 5.11.1 Restrictions 5.11 Polarity Detection If you use a Linear Servomotor that does not have a polarity sensor, then you must detect the polarity. Detecting the polarity means that the position of the electrical phase angle on the electrical angle coordinates of the Servomotor is detected. -
Page 140: Using The /S-On (Servo On) Signal To Perform Polarity Detection
5.11 Polarity Detection 5.11.2 Using the /S-ON (Servo ON) Signal to Perform Polarity Detection • There must be no alarms except for an A.C22 alarm (Phase Information Disagreement). • The parameters must not be write prohibited. (This item applies only when using the Sig- maWin+ or Digital Operator.) •... -
Page 141: Using A Tool Function To Perform Polarity Detection
5.11 Polarity Detection 5.11.4 Using a Tool Function to Perform Polarity Detection Signal Type Signal Connector Pin No. Meaning Status Turns ON the servo (supplies power to the motor) and (closed) enables operation. CN1-40 /S-ON (default setting) Turns OFF the servo (stops power supply to the (open) motor) and disables operation. - Page 142 5.11 Polarity Detection 5.11.4 Using a Tool Function to Perform Polarity Detection Click the Continue Button. Click the Cancel Button to cancel polarity detection. The Main Window will return. Click the Start Button. Polarity detection will be executed. This concludes the procedure to execute polarity detection. 5-30...
-
Page 143: Overtravel And Related Settings
5.12 Overtravel and Related Settings 5.12 Overtravel and Related Settings Overtravel is a safety function of the SERVOPACK that forces the Servomotor to stop in response to a signal input from a limit switch that is activated when a moving part of the machine exceeds the safe range of movement. -
Page 144: Overtravel Signals
5.12 Overtravel and Related Settings 5.12.1 Overtravel Signals 5.12.1 Overtravel Signals The overtravel signals include the P-OT (Forward Drive Prohibit) and the N-OT (Reverse Drive Prohibit) signals. Type Signal Connector Pin No. Signal Status Meaning Forward drive is enabled (actual operation). P-OT CN1-42 Forward drive is prohibited... -
Page 145: Motor Stopping Method For Overtravel
5.12 Overtravel and Related Settings 5.12.3 Motor Stopping Method for Overtravel 5.12.3 Motor Stopping Method for Overtravel You can set the stopping method of the Servomotor when overtravel occurs in Pn001 = n.XX (Servo OFF or Alarm Group 1 Stopping Method and Overtravel Stopping Method). Motor Stopping Status after Parameter... -
Page 146: Overtravel Warnings
5.12 Overtravel and Related Settings 5.12.4 Overtravel Warnings Maximum speed Operating speed × Deceleration time (Pn30A) Actual deceleration time Maximum speed Operating speed Actual deceleration time Pn30A 5.12.4 Overtravel Warnings You can set the system to detect an A.9A0 warning (Overtravel) if overtravel occurs while the servo is ON. - Page 147 5.12 Overtravel and Related Settings 5.12.4 Overtravel Warnings 1. Warnings are detected for overtravel in the same direction as the reference. Information 2. Warnings are not detected for overtravel in the opposite direction from the reference. Example: A warning will not be output for a forward reference even if the N-OT signal turns 3.
-
Page 148: Holding Brake
5.13 Holding Brake 5.13.1 Brake Operating Sequence 5.13 Holding Brake A holding brake is used to hold the position of the moving part of the machine when the SER- VOPACK is turned OFF so that moving part does not move due to gravity or an external force. You can use the brake that is built into a Servomotor with a Brake, or you can provide one on the machine. -
Page 149: Bk (Brake) Signal
5.13 Holding Brake 5.13.2 /BK (Brake) Signal Time Required to Time Required to Model Voltage Release Brake [ms] Brake [ms] SGM7J-A5 to 04 SGM7J-06 to 10 24 VDC SGM7G-03 to 20 SGM7A-15 Linear Servomotors: The brake delay times depend on the brake that you use. Set the parameters related to /BK signal output timing according to the delay times for the brake that you will actually use. -
Page 150: Output Timing Of /Bk (Brake) Signal When The Servomotor Is Stopped
5.13 Holding Brake 5.13.3 Output Timing of /BK (Brake) Signal When the Servomotor Is Stopped 1. Signals other than the /BK signal are allocated to the connector pins by default. To allocate connector pins to the /BK signal, you must clear the allocations for the originally allocated sig- nals. -
Page 151: Output Timing Of /Bk (Brake) Signal When The Servomotor Is Operating
5.13 Holding Brake 5.13.4 Output Timing of /BK (Brake) Signal When the Servomotor Is Operating 5.13.4 Output Timing of /BK (Brake) Signal When the Servomotor Is Operating If an alarm occurs while the Servomotor is operating, the Servomotor will start stopping and the /BK signal will be turned OFF. - Page 152 5.13 Holding Brake 5.13.4 Output Timing of /BK (Brake) Signal When the Servomotor Is Operating • When the Time Set In Pn508 Elapses after the Power Supply to the Motor Is Stopped Analog /S-ON input, alarm, or power OFF Rotary Servomotor: Pn507 Linear Servomotor: Pn583 Motor speed Motor stopped with dynamic...
-
Page 153: Motor Stopping Methods For Servo Off And Alarms
5.14 Motor Stopping Methods for Servo OFF and Alarms 5.14.1 Stopping Method for Servo OFF 5.14 Motor Stopping Methods for Servo OFF and Alarms You can use the following methods to stop the Servomotor when the servo is turned OFF or an alarm occurs. -
Page 154: Servomotor Stopping Method For Alarms
5.14 Motor Stopping Methods for Servo OFF and Alarms 5.14.2 Servomotor Stopping Method for Alarms 5.14.2 Servomotor Stopping Method for Alarms There are two types of alarms, group 1 (Gr. 1) alarms and group 2 (Gr. 2) alarms. A different parameter is used to set the stopping method for alarms for each alarm type. - Page 155 5.14 Motor Stopping Methods for Servo OFF and Alarms 5.14.2 Servomotor Stopping Method for Alarms Parameter Status after Servomotor When Servomotor Classification Stopping Method Enabled Pn00B Pn00A Pn001 Stops Dynamic brake (default setting) Zero-speed stop- (default – ...
-
Page 156: Motor Overload Detection Level
5.15 Motor Overload Detection Level 5.15.1 Detection Timing for Overload Warnings (A.910) 5.15 Motor Overload Detection Level The motor overload detection level is the threshold used to detect overload alarms and over- load warnings when the Servomotor is subjected to a continuous load that exceeds the Servo- motor ratings. -
Page 157: Detection Timing For Overload Alarms (A.720)
5.15 Motor Overload Detection Level 5.15.2 Detection Timing for Overload Alarms (A.720) 5.15.2 Detection Timing for Overload Alarms (A.720) If Servomotor heat dissipation is insufficient (e.g., if the heat sink is too small), you can lower the overload alarm detection level to help prevent overheating. To reduce the overload alarm detection level, change the setting of Pn52C (Base Current Der- ating at Motor Overload Detection). -
Page 158: Electronic Gear Settings
5.16 Electronic Gear Settings 5.16 Electronic Gear Settings The minimum unit of the position data that is used to move a load is called the reference unit. The reference unit is used to give travel amounts, not in pulses, but rather in distances or other physical units (such as μm or °) that are easier to understand. -
Page 159: Electronic Gear Ratio Settings
5.16 Electronic Gear Settings 5.16.1 Electronic Gear Ratio Settings When the Electronic Gear Is Not Used When the Electronic Gear Is Used To move the load 10 mm: To use reference units to move the load 10 mm: 10 × 1000 ÷ 20 × 256 = 128,000 If we set the reference unit to 1 μm, the travel distance is 1 μm per pulse. - Page 160 5.16 Electronic Gear Settings 5.16.1 Electronic Gear Ratio Settings SGM7A, SGM7J, SGM7G - Specification Code Encoder Resolution 24-bit multiturn absolute encoder 16,777,216 24-bit incremental encoder 16,777,216 SGMCS - Code Specification Encoder Resolution 20-bit single-turn absolute encoder 1,048,576 20-bit incremental encoder 1,048,576 SGMCV - Specification...
- Page 161 5.16 Electronic Gear Settings 5.16.1 Electronic Gear Ratio Settings Linear Type of Model of Serial Con- Linear Encoder Encoder Linear Manufacturer verter Unit or Model of Resolution Resolution Model Pitch Encoder Head with Interpolator [μm] Heidenhain 0.005 μm LIC4100 Series 20.48 4,096 EIB3391Y...
-
Page 162: Electronic Gear Ratio Setting Examples
5.16 Electronic Gear Settings 5.16.2 Electronic Gear Ratio Setting Examples 5.16.2 Electronic Gear Ratio Setting Examples Setting examples are provided in this section. • Rotary Servomotors Machine Configuration Ball Screw Rotary Table Belt and Pulley Reference unit: 0.005 mm Reference unit: 0.01° Reference unit: 0.001 mm Load shaft Step... -
Page 163: Resetting The Absolute Encoder
5.17 Resetting the Absolute Encoder 5.17.1 Precautions on Resetting 5.17 Resetting the Absolute Encoder In a system that uses an absolute encoder, the multiturn data must be reset at startup. An alarm related to the absolute encoder (A.810 or A.820) will occur when the absolute encoder must be reset, such as when the power supply is turned ON. -
Page 164: Operating Procedure
5.17 Resetting the Absolute Encoder 5.17.3 Operating Procedure 5.17.3 Operating Procedure Use the following procedure to reset the absolute encoder Confirm that the servo is OFF. Select Setup - Reset Absolute Encoder from the menu bar of the Main Window of the SigmaWin+. - Page 165 5.17 Resetting the Absolute Encoder 5.17.3 Operating Procedure Click the OK Button. The absolute encoder will be reset. When Resetting Fails If you attempted to reset the absolute encoder when the servo was ON in the SERVOPACK, the fol- lowing dialog box will be displayed and processing will be cancelled. Click the OK Button.
-
Page 166: Setting The Origin Of The Absolute Encoder
5.18 Setting the Origin of the Absolute Encoder 5.18.1 Setting the Origin of the Absolute Linear Encoder 5.18 Setting the Origin of the Absolute Encoder 5.18.1 Setting the Origin of the Absolute Linear Encoder You can set any position as the origin in the following Linear Encoders. •... - Page 167 5.18 Setting the Origin of the Absolute Encoder 5.18.1 Setting the Origin of the Absolute Linear Encoder Click the Continue Button. Click the Execute setting Button. Click the Continue Button. Click the Cancel Button to cancel setting the origin of the absolute linear encoder. The previous dia- log box will return.
- Page 168 5.18 Setting the Origin of the Absolute Encoder 5.18.1 Setting the Origin of the Absolute Linear Encoder Click the OK Button. Turn the power supply to the SERVOPACK OFF and ON again. If you use a Linear Servomotor that does not have a polarity sensor, perform polarity detection.
-
Page 169: Setting The Regenerative Resistor Capacity
20% = 20 W). Note: 1. An A.320 alarm will be displayed if the setting is not suitable. 2. The default setting of 0 specifies that the SERVOPACK’s built-in regenerative resistor or Yaskawa’s Regen- erative Resistor Unit is being used. -
Page 170: Application Functions
Application Functions This chapter describes the application functions that you can set before you start servo system operation. It also describes the setting methods. I/O Signal Allocations ....6-4 6.1.1 Input Signal Allocations . - Page 171 6.6.5 /COIN (Positioning Completion) Signal ..6-33 6.6.6 /NEAR (Near) Signal ..... .6-35 6.6.7 Reference Pulse Inhibition Function .
- Page 172 6.12.8 Multiturn Limit Setting ....6-79 6.12.9 Multiturn Limit Disagreement Alarm (A.CC0) ....... 6-80 6.13 Absolute Linear Encoders .
-
Page 173: I/O Signal Allocations
6.1 I/O Signal Allocations 6.1.1 Input Signal Allocations I/O Signal Allocations Functions are allocated to the pins on the I/O signal connector (CN1) in advance. You can change the allocations and the polarity for some of the connector pins. Function allocations and polarity settings are made with parameters. - Page 174 6.1 I/O Signal Allocations 6.1.1 Input Signal Allocations Changing Input Signal Allocations • If you change the default polarity settings for the /S-ON (Servo ON), P-OT (Forward Drive Pro- hibit), or N-OT (Reverse Drive Prohibit) signal, the main circuit power supply will not be turned OFF and the overtravel function will not operate if there are signal line disconnections or other Important problems.
-
Page 175: Output Signal Allocations
6.1 I/O Signal Allocations 6.1.2 Output Signal Allocations Parameter Pin No. Description Setting +24 V A reverse signal (a signal with “/” before the signal abbreviation, such as the / S-ON signal) is active when the contacts are OFF (open). A signal that does not have “/”... - Page 176 6.1 I/O Signal Allocations 6.1.2 Output Signal Allocations Interpreting the Output Signal Allocation Tables Analog These columns give the parameter settings to use. Signals are allocated to CN1 pins according to the settings. : Default settings. CN1 Pin No. Output Signal Name Disabled Output and Parameter...
-
Page 177: Alm (Servo Alarm) Signal
6.1 I/O Signal Allocations 6.1.3 ALM (Servo Alarm) Signal Example of Changing Output Signal Allocations The following example shows disabling the /COIN (Positioning Completion) signal allocated to CN1-25 and CN1-26 and allocating the /BK (Brake) signal. Pn50E = n. -
Page 178: Warn (Warning) Signal
6.1 I/O Signal Allocations 6.1.5 /WARN (Warning) Signal ALO1 to ALO3 (Alarm Code) Signals The ALO1 to ALO3 signals are allocated to the following output signal terminals (CN1) by default. Type Signal Name Pin No. ALO1 CN1-37 ALO2 Alarm Code Output CN1-38 Output ALO3... -
Page 179: Tgon (Rotation Detection) Signal
6.1 I/O Signal Allocations 6.1.6 /TGON (Rotation Detection) Signal 6.1.6 /TGON (Rotation Detection) Signal The /TGON signal indicates that the Servomotor is operating. This signal is output when the shaft of the Servomotor rotates at the setting of Pn502 (Rotation Detection Level) or faster or the setting of Pn581 (Zero Speed Level) or faster. - Page 180 6.1 I/O Signal Allocations 6.1.7 /S-RDY (Servo Ready) Signal The /S-RDY signal is allocated to CN1-29 and CN1-30 by default. Type Signal Connector Pin No. Signal Status Meaning ON (closed) Ready to receive the /S-ON (Servo ON) signal. CN1-29 and CN1- Output /S-RDY Not ready to receive the /S-ON (Servo ON) sig-...
-
Page 181: Operation For Momentary Power Interruptions
6.2 Operation for Momentary Power Interruptions Operation for Momentary Power Interruptions Even if the main power supply to the SERVOPACK is interrupted momentarily, power supply to the motor (servo ON status) will be maintained for the time set in Pn509 (Momentary Power Interruption Hold Time). -
Page 182: Semi F47 Function
6.3 SEMI F47 Function SEMI F47 Function The SEMI F47 function detects an A.971 warning (Undervoltage) and limits the output current if the DC main circuit power supply voltage to the SERVOPACK drops to a specified value or lower because the power was momentarily interrupted or the main circuit power supply voltage was temporarily reduced. - Page 183 6.3 SEMI F47 Function Setting for A.971 Warnings (Undervoltage) You can set whether or not to detect A.971 warnings (Undervoltage). Parameter Meaning When Enabled Classification n.0 Do not detect undervoltage warning. (default setting) Detect undervoltage warning and limit Pn008 After restart Setup...
-
Page 184: Setting The Motor Maximum Speed
6.4 Setting the Motor Maximum Speed Setting the Motor Maximum Speed You can set the maximum speed of the Servomotor with the following parameter. • Rotary Servomotors Speed Position Torque Maximum Motor Speed Setting Range Setting Unit Default Setting When Enabled Classification Pn316 0 to 65,535... -
Page 185: Speed Control
6.5 Speed Control 6.5.1 Basic Settings for Speed Control Speed Control There are two types of speed control: speed control with an analog voltage reference and speed control with internal set speeds. This section describes speed control with an analog voltage reference. - Page 186 6.5 Speed Control 6.5.1 Basic Settings for Speed Control If you will use a host controller, such as a programmable controller, for position control, connect the above output pins to the speed reference output terminals on the host controller. SERVOPACK Host controller V-REF Analog...
- Page 187 6.5 Speed Control 6.5.1 Basic Settings for Speed Control Adjusting the Speed Reference Offset With speed control, the Servomotor may sometimes rotate at a very low speed for a speed ref- erence of 0 V (with a reference speed of 0 or when the speed reference is stopped). This occurs because the internal reference in the SERVOPACK has a slight offset.
- Page 188 6.5 Speed Control 6.5.1 Basic Settings for Speed Control Input a 0-V reference voltage from the host controller or an external circuit. Servomotor Analog 0-V speed reference or 0-V torque reference Host controller Slight rotation (when servo is ON) Servo OFF SERVOPACK Select Setup - Adjust Offset - Adjust the Speed and Torque Reference Offset from the menu bar of the Main Window of the SigmaWin+.
- Page 189 6.5 Speed Control 6.5.1 Basic Settings for Speed Control Manually Adjusting the Speed Reference Offset You can directly input a speed reference offset to adjust the speed reference. The offset is adjusted manually in the following cases. • When a position loop is created with the host computer and the position deviation when the Servomotor is stopped by a servo lock is to be set to 0 •...
- Page 190 6.5 Speed Control 6.5.1 Basic Settings for Speed Control Use the +1 and -1 Buttons to adjust the value in the Speed Reference Box to 0. 6-21...
-
Page 191: Soft Start Settings
6.5 Speed Control 6.5.2 Soft Start Settings 6.5.2 Soft Start Settings The soft start function takes a stepwise speed reference input and applies the specified accel- eration/deceleration rates to convert it to a trapezoidal speed reference. You specify the acceleration/deceleration rates in Pn305 (Soft Start Acceleration Time) and Pn306 (Soft Start Deceleration Time). -
Page 192: Speed Reference Filter
6.5 Speed Control 6.5.3 Speed Reference Filter 6.5.3 Speed Reference Filter The speed reference filter is a first order lag filter that is applied to the V-REF (Speed Reference Input) signal. You set the speed reference filter in Pn307 (Speed Reference Filter Time Constant). It is normally not necessary to change this parameter. - Page 193 6.5 Speed Control 6.5.4 Zero Clamping /ZCLAMP (Zero Clamping) Signal Use the /ZCLAMP signal to enable zero clamping. When Using the Default Input Signal Allocations (Pn50A = n.0) The /ZCLAMP signal is allocated to pin CN1-41 on the I/O signal connector by default. Type Signal Connector Pin No.
-
Page 194: V-Cmp (Speed Coincidence Detection) Signal
6.5 Speed Control 6.5.5 /V-CMP (Speed Coincidence Detection) Signal Related Parameters You set the speed at which to apply zero clamping as the zero clamping level (Pn501 or Pn580). If you set a value that exceeds the maximum speed of the Servomotor, the actual speed will be limited to the maximum speed of the Servomotor. - Page 195 6.5 Speed Control 6.5.5 /V-CMP (Speed Coincidence Detection) Signal • Linear Servomotors Speed Speed Coincidence Signal Detection Width Pn582 Setting Range Setting Unit Default Setting When Enabled Classification 0 to 100 1 mm/s Immediately Setup The signal is output when the difference between the reference speed and motor speed is equal or less than the setting.
-
Page 196: Position Control
6.6 Position Control Position Control Position control is used to input a pulse train reference from the host controller to the SERVO- PACK to move to a target position. The position is controlled with the number of input pulses, and the speed is controlled with the input pulse frequency. Use position control when position- ing is required. -
Page 197: Basic Settings For Position Control
6.6 Position Control 6.6.1 Basic Settings for Position Control 6.6.1 Basic Settings for Position Control This section describes the reference pulse forms and input filters. Reference Pulse Forms To perform speed control, you must specify how the reference is input from the host controller (i.e., the reference pulse form). - Page 198 6.6 Position Control 6.6.1 Basic Settings for Position Control Electrical Specifications for Pulse Train Reference The following table describes the forms for pulse train references. Pulse Train Reference Form Electrical Specifications Remarks Sign and pulse train t1 t2 (SIGN and PLUS signals) SIGN SIGN is high for t1, t2, t3, t7 ≤...
-
Page 199: Clr (Position Deviation Clear) Signal Function And Settings
6.6 Position Control 6.6.2 CLR (Position Deviation Clear) Signal Function and Settings 6.6.2 CLR (Position Deviation Clear) Signal Function and Set- tings The CLR (Position Deviation Clear) signal is used to clear the deviation counter in the SERVO- PACK. As long as the CLR signal is ON, the deviation counter will be 0, so a position loop will not be formed. -
Page 200: Reference Pulse Input Multiplication Switching
6.6 Position Control 6.6.3 Reference Pulse Input Multiplication Switching Setting the Clear Operation (Pn200 = n.X) This parameter determines when the position error should be set to zero according to the con- dition of the SERVOPACK. Set Pn200 = n.X (Clear Operation). Parameter Meaning When Enabled... -
Page 201: Smoothing Settings
6.6 Position Control 6.6.4 Smoothing Settings CAUTION Always use the /PSELA signal to confirm that the reference pulse input multiplier has been switched and make sure that there are no position reference pulses before you input a posi- tion reference. Unexpected operation may occur if position reference pulses are input before the reference pulse input multiplier changes. -
Page 202: Coin (Positioning Completion) Signal
6.6 Position Control 6.6.5 /COIN (Positioning Completion) Signal Position Position Reference Acceleration/Deceleration Time Constant Setting Range Setting Unit Default Setting When Enabled Classification Pn216 Immediately after 0 to 65,535 0.1 ms Setup the motor stops Position Average Position Reference Movement Time Setting Range Setting Unit Default Setting... - Page 203 6.6 Position Control 6.6.5 /COIN (Positioning Completion) Signal Setting the Positioning Completed Width The /COIN signal is output when the difference between the reference position and the current position (i.e., the position deviation as given by the value of the deviation counter) is equal to or less than the setting of the positioning completed width (Pn522).
-
Page 204: Near (Near) Signal
6.6 Position Control 6.6.6 /NEAR (Near) Signal 6.6.6 /NEAR (Near) Signal The /NEAR (Near) signal indicates when positioning completion is being approached. The host controller receives the NEAR signal before it receives the /COIN (Positioning Comple- tion) signal, it can start preparations for the operating sequence to use after positioning has been completed. - Page 205 6.6 Position Control 6.6.7 Reference Pulse Inhibition Function When Using the Default Input Signal Allocations (Pn50A = n.0) Type Signal Connector Pin No. Signal Status Meaning ON (closed) Counting the reference pulses is stopped. CN1-41 Input /INHIBIT (default setting) OFF (open) The reference pulses are counted.
-
Page 206: Torque Control
6.7 Torque Control 6.7.1 Basic Settings for Torque Control Torque Control Torque control is performed by inputting a torque reference with an analog voltage reference to the SERVOPACK to control the Servomotor with a torque that is proportional to the input volt- age. -
Page 207: Adjusting The Torque Reference Offset
6.7 Torque Control 6.7.2 Adjusting the Torque Reference Offset Output torque (%) Analog (Rated torque) Torque reference voltage (V) 10 12 Default Setting -100 -200 -300 Setting range (1.0 V to 10.0 V) Input voltage range (0 to 12 V) Note: You can input a torque reference that exceeds the rated torque, but A.710 (Instantaneous Overload) or A.720 (Continuous Overload) alarms may occur if the reference is maintained for a long time or the motor outputs a torque that exceeds the rated torque. - Page 208 6.7 Torque Control 6.7.2 Adjusting the Torque Reference Offset Applicable Tools The following table lists the tools that you can use to automatically adjust the torque reference offset and the applicable tool functions. Tool Function Operating Procedure Reference 13.4.8 Autotune Analog (Speed/Torque) Reference Off- Panel Operator Fn009 set (Fn009) on page 13-17...
- Page 209 6.7 Torque Control 6.7.2 Adjusting the Torque Reference Offset Analog Note: You cannot automatically adjust the reference offset if a position loop is created with the host controller. Man- ually adjust the torque reference offset. Manually Adjusting the Torque Reference Offset You can directly input a torque reference offset to adjust the torque reference.
- Page 210 6.7 Torque Control 6.7.2 Adjusting the Torque Reference Offset Operating Procedure Use the following procedure to manually adjust the torque reference offset. Input a 0-V reference voltage from the host controller or an external circuit. Servomotor Analog 0-V speed reference or 0-V torque reference Host controller Slight rotation...
-
Page 211: Torque Reference Filter Settings
Torque Control 6.7.3 Torque Reference Filter Settings 6.7.3 Torque Reference Filter Settings The torque reference filter is a first order lag filter that is applied to the T-REF (Torque Reference Input) signal. The torque reference input filter is set in Pn415 (T-REF Filter Time Constant). If the setting is too high, the response to the torque reference may be slowed down. - Page 212 Torque Control 6.7.4 Speed Limit during Torque Control Internal Speed Limiting If you select internal speed limiting for the torque control option (Pn002 = n.0), set the speed limit for the motor in Pn407 (Speed Limit during Torque Control) or Pn480 (Speed Limit during Force Control).
-
Page 213: Encoder Divided Pulse Output
6.8 Encoder Divided Pulse Output 6.8.1 Encoder Divided Pulse Output Signals Encoder Divided Pulse Output The encoder divided pulse output is a signal that is output from the encoder and processed inside the SERVOPACK. It is then output externally in the form of two phase pulse signals (phases A and B) with a 90°... - Page 214 6.8 Encoder Divided Pulse Output 6.8.1 Encoder Divided Pulse Output Signals Output Phase Forms Forward rotation or movement Reverse rotation or movement (phase B leads by 90°) (phase A leads by 90°) 90° 90° Phase A Phase A Phase B Phase B Phase C Phase C...
- Page 215 6.8 Encoder Divided Pulse Output 6.8.1 Encoder Divided Pulse Output Signals When Passing the First Origin Signal (Ref) in the Forward Direction and Returning after Turning ON the Power Supply Machine position (forward) No origin signal (Ref) is output by the external encoder. However, a phase-C pulse will be output from the SERVOPACK when the motor moves in the Origin detection reverse direction, because this is the same position from which a phase-C...
- Page 216 6.8 Encoder Divided Pulse Output 6.8.1 Encoder Divided Pulse Output Signals Observe the following precaution if you set Pn081 to n.0 (Output phase-C pulses only in the forward direction). When a linear incremental encoder from Magnescale Co., Ltd. is used, the count direction of the encoder determines how the phase-C pulse (CN1-19 and CN1-20) is output.
- Page 217 6.8 Encoder Divided Pulse Output 6.8.1 Encoder Divided Pulse Output Signals When Using a Linear Encoder with Multiple Origins and First Passing the Origin Posi- tion in the Forward Direction and Returning after Turning ON the Power Supply The encoder’s phase-C pulse is output when the origin detection position is passed for the first time in the forward direction after the power supply is turned ON.
-
Page 218: Setting For The Encoder Divided Pulse Output
6.8 Encoder Divided Pulse Output 6.8.2 Setting for the Encoder Divided Pulse Output 6.8.2 Setting for the Encoder Divided Pulse Output This section describes the setting for the encoder divided pulse output for a Rotary Servomotor or Linear Servomotor. Encoder Divided Pulse Output When Using a Rotary Servomotor If you will use a Rotary Servomotor, set the number of encoder output pulses (Pn212). - Page 219 6.8 Encoder Divided Pulse Output 6.8.2 Setting for the Encoder Divided Pulse Output Encoder Divided Pulse Output When Using a Linear Servomotor If you will use a Linear Servomotor, set the encoder output resolution (Pn281). Speed Position Force Encoder Output Resolution Pn281 Setting Range Setting Unit...
-
Page 220: Internal Set Speed Control
6.9 Internal Set Speed Control 6.9.1 Input Signals for Internal Set Speed Control Internal Set Speed Control You can set motor speeds in three parameters in the SERVOPACK and then perform speed control by using external input signals to select the motor speed and direction. Because the speed is controlled with parameters in the SERVOPACK, an external pulse generator or a refer- ence generator is not required to control the speed. -
Page 221: Setting The Control Method To Internal Set Speed Control
6.9 Internal Set Speed Control 6.9.2 Setting the Control Method to Internal Set Speed Control 6.9.2 Setting the Control Method to Internal Set Speed Con- trol Set Pn000 to n.X (Control Method Selection) to 3 to specify internal set speed control. Parameter Meaning When Enabled... -
Page 222: Changing Internal Set Speeds With Input Signals
6.9 Internal Set Speed Control 6.9.4 Changing Internal Set Speeds with Input Signals 6.9.4 Changing Internal Set Speeds with Input Signals You can select the internal set speed and direction with the ON/OFF combinations of the /SPD- D (Motor Direction) signal and the /SPD-A and /SPD-B (Internal Set Speed Selection) signals. •... - Page 223 6.9 Internal Set Speed Control 6.9.4 Changing Internal Set Speeds with Input Signals Motor speed Analog Speed 3 +SPEED3 The acceleration/deceleration rates Speed 2 are set in Pn305 and Pn306. +SPEED2 Speed 1 +SPEED1 Stopped Stopped Stopped -SPEED1 Speed 1 -SPEED2 Speed 2 -SPEED3...
-
Page 224: Selecting Combined Control Methods
6.10 Selecting Combined Control Methods 6.10.1 Setting Pn000 = n.X (Control Method Selection) to 4, 5, or 6 6.10 Selecting Combined Control Methods You can specify switching the SERVOPACK between two control methods. To combine control methods, set Pn000 = n.X (Control Method Selection) to between 4 and B. This section describes how to switch between the methods and the switching conditions. - Page 225 6.10 Selecting Combined Control Methods 6.10.1 Setting Pn000 = n.X (Control Method Selection) to 4, 5, or 6 • Linear Servomotors Input Pins Operation for Setting of Pn000 = n.X Motor /SPD-D /SPD-A /SPD-B Direction ...
- Page 226 6.10 Selecting Combined Control Methods 6.10.1 Setting Pn000 = n.X (Control Method Selection) to 4, 5, or 6 When Changing Input Signal Allocations (Pn50A = n.1) The following four signals are assigned to CN1-40 to CN1-46 on the I/O signal connector: /C- SEL (Control Selection), /SPD-A and /SPD-B (Internal Set Speed Selection) signals, and /SPD- D (Motor Direction) signal.
-
Page 227: Setting Pn000 = N.X (Control Method Selection) To 7, 8, Or 9
6.10 Selecting Combined Control Methods 6.10.2 Setting Pn000 = n.X (Control Method Selection) to 7, 8, or 9 6.10.2 Setting Pn000 = n.X (Control Method Selection) to 7, 8, or 9 You can set Pn000 = n.X (Control Method Selection) to switch between the following control methods. - Page 228 6.10 Selecting Combined Control Methods 6.10.3 Setting Pn000 = n.X (Control Method Selection) to A or B When Changing Input Signal Allocations (Pn50A = n.1) Control Method for Setting of Pn000 = n.X Connector Type Signal Signal Status Pin No. ...
-
Page 229: Selecting Torque Limits
6.11 Selecting Torque Limits 6.11.1 Internal Torque Limits 6.11 Selecting Torque Limits You can limit the torque that is output by the Servomotor. There are four different ways to limit the torque. These are described in the following table. Limit Method Outline Control Method Reference... -
Page 230: External Torque Limits
6.11 Selecting Torque Limits 6.11.2 External Torque Limits • Linear Servomotors Speed Position Force Forward Force Limit Setting Range Setting Unit Default Setting When Enabled Classification Pn483 0 to 800 Immediately Setup Speed Position Force Reverse Force Limit Setting Range Setting Unit Default Setting When Enabled... - Page 231 6.11 Selecting Torque Limits 6.11.2 External Torque Limits Setting the Torque Limits The parameters that are related to setting the torque limits are given below. • Rotary Servomotors If the setting of Pn402 (Forward Torque Limit), Pn403 (Reverse Torque Limit), Pn404 (Forward External Torque Limit), or Pn405 (Reverse External Torque Limit) is too low, the torque may be insufficient for acceleration or deceleration of the Servomotor.
- Page 232 6.11 Selecting Torque Limits 6.11.2 External Torque Limits Changes in the Output Torque for External Torque Limits The following table shows the changes in the output torque when the internal torque limit is set to 800%. • Rotary Servomotors In this example, the Servomotor direction is set to Pn000 = n.0 (Use CCW as the forward direction).
-
Page 233: Limiting Torque With An Analog Reference
6.11 Selecting Torque Limits 6.11.3 Limiting Torque with an Analog Reference 6.11.3 Limiting Torque with an Analog Reference The analog voltage on the T-REF terminals (CN1-9 and CN1-10) is used to limit the torque with an analog reference. The smallest of the analog reference torque reference and the torque limits for Pn402 Pn403 is used. - Page 234 6.11 Selecting Torque Limits 6.11.3 Limiting Torque with an Analog Reference Setting the External Torque Limit You must set Pn002 to n.1 (Use T-REF as an external torque limit input) to use T-REF (CN1-9 and CN1-10) as the torque limit input. Parameter Meaning When Enabled...
-
Page 235: Limiting Torque With An External Torque Limit And An Analog Voltage Reference
6.11 Selecting Torque Limits 6.11.4 Limiting Torque with an External Torque Limit and an Analog Voltage Reference 6.11.4 Limiting Torque with an External Torque Limit and an Analog Voltage Reference The torque is limited by combining torque limits for an external input signal and torque limits for an analog voltage reference. - Page 236 6.11 Selecting Torque Limits 6.11.4 Limiting Torque with an External Torque Limit and an Analog Voltage Reference /P-CL (Forward External Torque Limit) Signal, /N-CL (Reverse External Torque Limit) Signal, and T-REF (Torque Reference Input) Signal The input signals that are used for torque limits with an external torque limit and an analog volt- age reference are described below.
- Page 237 6.11 Selecting Torque Limits 6.11.4 Limiting Torque with an External Torque Limit and an Analog Voltage Reference Related Parameters The parameters that are related to torque limits with an external torque limit and an analog volt- age reference are described below. With the internal torque limits, the torque is always limited.
-
Page 238: Clt (Torque Limit Detection) Signal
6.11 Selecting Torque Limits 6.11.5 /CLT (Torque Limit Detection) Signal 6.11.5 /CLT (Torque Limit Detection) Signal This section describes the /CLT signal, which indicates the status of limiting the motor output torque. Type Signal Connector Pin No. Signal Status Meaning The motor output torque is being ON (closed) limited. -
Page 239: Absolute Encoders
6.12 Absolute Encoders 6.12 Absolute Encoders The absolute encoder records the current position of the stop position even when the power supply is OFF. With a system that uses an absolute encoder, the host controller can monitor the current position. Therefore, it is not necessary to perform an origin return operation when the power supply to the sys- tem is turned ON. -
Page 240: Connecting An Absolute Encoder
6.12 Absolute Encoders 6.12.1 Connecting an Absolute Encoder 6.12.1 Connecting an Absolute Encoder The following diagram shows the typical connections between a Servomotor with an absolute encoder, the SERVOPACK, and the host controller. SERVOPACK Host controller S_Analog Phase A Phase A /PAO Absolute encoder Phase B... -
Page 241: Reading The Position Data From The Absolute Encoder
6.12 Absolute Encoders 6.12.4 Reading the Position Data from the Absolute Encoder Encoder Divided Pulse Output Port A conceptual diagram of the connections of the PAO, PBO, and PCO (Encoder Divided Pulse Output) signals to the host controller is provided below. SERVOPACK Host controller Serial... -
Page 242: Encoder
6.12 Absolute Encoders 6.12.4 Reading the Position Data from the Absolute Encoder Using the SEN Signal to Read the Position Data from the Absolute Encoder • When Using the Default I/O Signals (Pn50A = n. The setting of Pn515 = n. X (SEN (Absolute Data Request Input) Signal Allocation) is ignored. - Page 243 6.12 Absolute Encoders 6.12.4 Reading the Position Data from the Absolute Encoder Using the Pull-Up Power Supply in the SERVOPACK Host controller SERVOPACK PL1, PL2, or PL3 terminal +12 V S_Analog Ω Ω 4.7 k Approx. 9 mA 1.5 V max. ...
- Page 244 6.12 Absolute Encoders 6.12.4 Reading the Position Data from the Absolute Encoder Control power supply *1 Main circuit power supply ALM signal No alarm /S-RDY signal /S-ON signal Power not supplied. Power supplied. Motor power status SEN signal *1 Position within one rotation Multiturn data Incremental pulses PAO signal...
-
Page 245: Transmission Specifications
6.12 Absolute Encoders 6.12.5 Transmission Specifications When the specified time has elapsed after the control power supply to the SERVOPACK is turned ON, the SERVOPACK will automatically read the position data from the absolute encoder. The position data from the absolute encoder is sent according to the transmission specifications. The position of the absolute encoder within one rotation is output as a pulse train. -
Page 246: Calculating The Current Position In Machine Coordinates
6.12 Absolute Encoders 6.12.6 Calculating the Current Position in Machine Coordinates Item PAO signal PSO signal Synchronization Method Start-stop synchronization (ASYNC) Baud Rate 9,600 bps Start Bits 1 bit Stop Bits 1 bit Parity Even Character Code ASCII, 7 bits Data Format Refer to Data Format of PAO Signal. -
Page 247: Alarm Output From Output Ports For The Position Data From The Absolute Encoder
6.12 Absolute Encoders 6.12.7 Alarm Output from Output Ports for the Position Data from the Absolute Encoder Origin (reference position) Current position Machine coordinate ±0 Value of multiturn data M × R The current position P in the machine coordinate system is calculated as follows: ×... -
Page 248: Multiturn Limit Setting
6.12 Absolute Encoders 6.12.8 Multiturn Limit Setting The data format of the alarm information is shown below. Upper two digits 0 to 9 of alarm code 0 to 9 6.12.8 Multiturn Limit Setting The multiturn limit is used in position control for a turntable or other rotating body. For example, consider a machine that moves the turntable shown in the following diagram in only one direction. -
Page 249: Multiturn Limit Disagreement Alarm (A.cc0)
6.12 Absolute Encoders 6.12.9 Multiturn Limit Disagreement Alarm (A.CC0) • If the motor operates in the reverse direction when the multiturn data is 0, the multiturn data will change to the value set in Pn205. • If the motor operates in the forward direction when the multiturn data is at the value set in Pn205, the multiturn data will change to 0. - Page 250 6.12 Absolute Encoders 6.12.9 Multiturn Limit Disagreement Alarm (A.CC0) Click the Continue Button. Click the Cancel Button to cancel setting the multiturn limit. The Main Window will return. Change the setting. Click the Writing into the Servopack Button. Click the OK Button. Turn the power supply to the SERVOPACK OFF and ON again.
- Page 251 6.12 Absolute Encoders 6.12.9 Multiturn Limit Disagreement Alarm (A.CC0) Click the Continue Button. Click the Writing into the Motor Button. Click the Re-change Button to change the setting. Click the OK Button. 6-82...
-
Page 252: Absolute Linear Encoders
6.13 Absolute Linear Encoders 6.13.1 Connecting an Absolute Linear Encoder 6.13 Absolute Linear Encoders The absolute linear encoder records the current position of the stop position even when the power supply is OFF. With a system that uses an absolute linear encoder, the host controller can monitor the current position. -
Page 253: Output Ports For The Position Data From The Absolute Linear Encoder
6.13 Absolute Linear Encoders 6.13.3 Output Ports for the Position Data from the Absolute Linear Encoder 6.13.3 Output Ports for the Position Data from the Absolute Linear Encoder You can read the position data of the absolute linear encoder from the PAO, PBO, and PCO (Encoder Divided Pulse Output) signals and the PSO (Absolute Encoder Position Output) signal. -
Page 254: Reading The Position Data From The Absolute Linear Encoder
6.13 Absolute Linear Encoders 6.13.4 Reading the Position Data from the Absolute Linear Encoder 6.13.4 Reading the Position Data from the Absolute Linear Encoder There are two methods that you can use to read the position data from the absolute linear encoder: Using the SEN (Absolute Data Request) signal and not using the SEN signal. - Page 255 6.13 Absolute Linear Encoders 6.13.4 Reading the Position Data from the Absolute Linear Encoder Allocating the SEN Signal to a General-Purpose Input Type Signal Connector Pin No. Signal Status Meaning Does not request the position data from the absolute OFF (open) linear encoder.
- Page 256 6.13 Absolute Linear Encoders 6.13.4 Reading the Position Data from the Absolute Linear Encoder Sequence for Reading the Position Data from the Absolute Linear Encoder Using the SEN (Absolute Data Request) Signal The sequence for using the SEN signal to read the position data from the absolute linear encoder of a Linear Servomotor is given below.
-
Page 257: Transmission Specifications
6.13 Absolute Linear Encoders 6.13.5 Transmission Specifications Control power supply Main circuit power supply ALM signal No alarm /S-RDY signal /S-ON signal Power not supplied. Power supplied. Motor power status Lower 20-bit position data Incremental pulses Upper 16-bit position Undefined. PAO signal data (with sign) (incremental pulses) -
Page 258: Calculating The Current Position In Machine Coordinates
6.13 Absolute Linear Encoders 6.13.6 Calculating the Current Position in Machine Coordinates Data Format of PAO Signal As shown below, the message format consists of eight characters: “P,” the sign, the 5-digit upper 15- bit position data, and “CR” (which indicates the end of the message). + or −... -
Page 259: Alarm Output From The Output Ports For The Position Data From The Absolute Linear Encoder
6.13 Absolute Linear Encoders 6.13.7 Alarm Output from the Output Ports for the Position Data from the Absolute Linear Encoder The current position P in the machine coordinate system is calculated as follows: × R + P × R + P ’... -
Page 260: Software Reset
6.14 Software Reset 6.14.1 Preparations 6.14 Software Reset You can reset the SERVOPACK internally with the software. A software reset is used when resetting alarms and changing the settings of parameters that normally require turning the power supply to the SERVOPACK OFF and ON again. This can be used to change those parameters without turning the power supply to the SERVOPACK OFF and ON again. - Page 261 6.14 Software Reset 6.14.3 Operating Procedure Click the Cancel Button to cancel the software reset. The Main Window will return. Click the Execute Button. Click the OK Button to end the software reset operation. All settings including parameters will have been re-calculated. When you finish this operation, discon- nect the SigmaWin+ from the SERVOPACK, and then connect it again.
-
Page 262: Initializing The Vibration Detection Level
6.15 Initializing the Vibration Detection Level 6.15.1 Preparations 6.15 Initializing the Vibration Detection Level You can detect machine vibration during operation to automatically adjust the settings of Pn312 or Pn384 (Vibration Detection Level) to detect A.520 alarms (Vibration Alarm) and A.911 warnings (Vibration Warning) more precisely. -
Page 263: Applicable Tools
6.15 Initializing the Vibration Detection Level 6.15.2 Applicable Tools 6.15.2 Applicable Tools The following table lists the tools that you can use to initialize the vibration detection level and the applicable tool functions. Tool Function Operating Procedure Reference 13.4.20 Initialize Vibration Detection Level (Fn01B) on Panel Operator Fn01B page 13-25... - Page 264 6.15 Initializing the Vibration Detection Level 6.15.3 Operating Procedure Click the Execute setting Button. The newly set vibration detection level will be displayed and the value will be saved in the SERVO- PACK. 6-95...
-
Page 265: Related Parameters
6.15 Initializing the Vibration Detection Level 6.15.4 Related Parameters 6.15.4 Related Parameters The following three items are given in the following table. • Parameters Related to this Function These are the parameters that are used or referenced when this function is executed. •... -
Page 266: Adjusting The Motor Current Detection Signal Offset
6.16 Adjusting the Motor Current Detection Signal Offset 6.16.1 Automatic Adjustment 6.16 Adjusting the Motor Current Detection Signal Offset The motor current detection signal offset is used to reduce ripple in the torque. You can adjust the motor current detection signal offset either automatically or manually. 6.16.1 Automatic Adjustment Perform this adjustment only if highly accurate adjustment is required to reduce torque ripple. -
Page 267: Manual Adjustment
6.16 Adjusting the Motor Current Detection Signal Offset 6.16.2 Manual Adjustment Click the Automatic Adjustment Tab in the Adjust the Motor Current Detection Offset Dialog Box. Click the Adjust Button. The values that result from automatic adjustment will be displayed in the New Boxes. 6.16.2 Manual Adjustment You can use this function if you automatically adjust the motor current detection signal offset and the torque ripple is still too large. - Page 268 6.16 Adjusting the Motor Current Detection Signal Offset 6.16.2 Manual Adjustment Preparations The following conditions must be met to manually adjust the motor current detection signal off- set. • The parameters must not be write prohibited. Applicable Tools The following table lists the tools that you can use to manually adjust the offset and the applica- ble tool functions.
- Page 269 6.16 Adjusting the Motor Current Detection Signal Offset 6.16.2 Manual Adjustment Use the +1 and -1 Buttons to adjust the offset for phase U. Change the offset by about 10 in the direction that reduces the torque ripple. Adjustment range: -512 to +511 Set the Channel Box in the Motor Current Detection Offset Area to V-phase.
- Page 270 Trial Operation and Actual Operation This chapter provides information on the flow and proce- dures for trial operation and convenient functions to use during trial operation. Flow of Trial Operation ....7-2 7.1.1 Flow of Trial Operation for Rotary Servomotors .
-
Page 271: Flow Of Trial Operation
7.1 Flow of Trial Operation 7.1.1 Flow of Trial Operation for Rotary Servomotors Flow of Trial Operation 7.1.1 Flow of Trial Operation for Rotary Servomotors The procedure for trial operation is given below. Step Meaning Reference Installation Install the Servomotor and SERVOPACK according to the installation conditions. -
Page 272: Flow Of Trial Operation For Linear Servomotors
7.1 Flow of Trial Operation 7.1.2 Flow of Trial Operation for Linear Servomotors Continued from previous page. Step Meaning Reference Trial Operation with the Servomotor Con- nected to the Machine CN1, to host controller To power supply 7.5 Trial Operation with the Servomotor Connected to Secure the motor flange to the the Machine on page 7-17 machine, and connect the... - Page 273 7.1 Flow of Trial Operation 7.1.2 Flow of Trial Operation for Linear Servomotors Continued from previous page. Step Meaning Reference Setting Parameters in the SERVOPACK No. of Parameter to Step Description Remarks Reference Set this parameter only if Linear Encoder Pn282 you are using a Serial Con- page 5-19...
- Page 274 7.1 Flow of Trial Operation 7.1.2 Flow of Trial Operation for Linear Servomotors Continued from previous page. Step Meaning Reference Trial Operation from the Host Controller for the Servomotor without a Load To power CN1, to supply host controller 7.4 Trial Operation from the Host Controller for the Ser- vomotor without a Load on page 7-10 Trial Operation with the Servomotor Connected to the Machine...
-
Page 275: Inspections And Confirmations Before Trial Operation
7.2 Inspections and Confirmations before Trial Operation Inspections and Confirmations before Trial Operation To ensure safe and correct trial operation, check the following items before you start trial oper- ation. • Make sure that the SERVOPACK and Servomotor are installed, wired, and connected cor- rectly. -
Page 276: Trial Operation For The Servomotor Without A Load
7.3 Trial Operation for the Servomotor without a Load 7.3.1 Preparations Trial Operation for the Servomotor without a Load You use jogging for trial operation of the Servomotor without a load. Jogging is used to check the operation of the Servomotor without connecting the SERVOPACK to the host controller. -
Page 277: Applicable Tools
7.3 Trial Operation for the Servomotor without a Load 7.3.2 Applicable Tools • Linear Servomotors Speed Position Force Jogging Speed Pn383 Setting Range Setting Unit Default Setting When Enabled Classification 0 to 10,000 1 mm/s Immediately Setup Speed Soft Start Acceleration Time Pn305 Setting Range Setting Unit... - Page 278 7.3 Trial Operation for the Servomotor without a Load 7.3.3 Operating Procedure Check the jogging speed and then click the Servo ON Button. The display in the Operation Area will change to Servo ON. Information To change the speed, click the Edit Button and enter the new speed. Click the Forward Button or the Reverse Button.
-
Page 279: Trial Operation From The Host Controller For The Servomotor Without A Load
7.4 Trial Operation from the Host Controller for the Servomotor without a Load Trial Operation from the Host Controller for the Servomotor without a Load Conform the following items before you start trial operation from the host controller for the Ser- vomotor without a load. -
Page 280: Trial Operation From The Host Controller For The Servomotor Without A Load
7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.1 Preparing the Servomotor for Trial Operation CAUTION Before you perform trial operation of the Servomotor without a load for references from the host controller, make sure that there is no load connected to the Servomotor (i.e., that all couplings and belts are removed from the Servomotor) to prevent unexpected accidents. - Page 281 7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.1 Preparing the Servomotor for Trial Operation If you are using a safety function, make sure that the safety function device is con- nected to CN8. Refer to the following section for the safety function device connection method.
-
Page 282: Trial Operation For Speed Control
7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.2 Trial Operation for Speed Control Analog If the above display appears, power is being supplied to the Servomotor and the servo is ON. If an alarm is displayed, the servo is OFF and power is not being supplied to the Servomotor. Refer to the following section, clear the alarm, and repeat the procedure from step 4. -
Page 283: Trial Operation For Position Control From The Host Controller With The Servopack Used For Speed Control
7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.3 Trial Operation for Position Control from the Host Controller with the SERVOPACK Used for Speed Control Gradually reduce the speed reference input from the host controller back to 0 V. Turn OFF the power supplies to the SERVOPACK. -
Page 284: Trial Operation For Position Control
7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.4 Trial Operation for Position Control 7.4.4 Trial Operation for Position Control This section describes the procedure for trial operation for position control. Preparations Confirm the following item before you perform the procedure for trial operation with position control. - Page 285 7.4 Trial Operation from the Host Controller for the Servomotor without a Load 7.4.4 Trial Operation for Position Control Check the reference pulse speed input to the SERVOPACK with the input reference pulse speed monitor. • Using the SigmaWin+: Monitor - Monitor - Motion Monitor, Input Reference Pulse Speed •...
-
Page 286: Trial Operation With The Servomotor Connected To The Machine7-17
7.5 Trial Operation with the Servomotor Connected to the Machine 7.5.1 Precautions Trial Operation with the Servomotor Connected to the Machine This section provides the procedure for trial operation with both the machine and Servomotor. 7.5.1 Precautions WARNING Operating mistakes that occur after the Servomotor is connected to the machine may not only damage the machine, but they may also cause accidents resulting in personal injury. -
Page 287: Operating Procedure
7.5 Trial Operation with the Servomotor Connected to the Machine 7.5.3 Operating Procedure • Emergency stop circuit wiring • Host controller wiring Refer to the following section and change the wiring to match the system configuration. 15.1 Examples of Connections to Host Controllers on page 15-2 7.5.3 Operating Procedure Enable the overtravel signals. - Page 288 7.5 Trial Operation with the Servomotor Connected to the Machine 7.5.3 Operating Procedure For future maintenance, save the parameter settings with one of the following methods. • Use the SigmaWin+ to save the parameters as a file. • Use the Parameter Copy Mode of the Digital Operator. •...
-
Page 289: Convenient Function To Use During Trial Operation
7.6 Convenient Function to Use during Trial Operation 7.6.1 Program Jogging Convenient Function to Use during Trial Operation This section describes some convenient operations that you can use during trial operation. Use them as required. 7.6.1 Program Jogging You can use program jogging to perform continuous operation with a preset operation pattern, travel distance, movement speed, acceleration/deceleration time, waiting time, and number of movements. - Page 290 7.6 Convenient Function to Use during Trial Operation 7.6.1 Program Jogging Continued from previous page. Setting Setting Operation Pattern of Pn530 Number of movements (Pn536) Speed 0 Movement Speed (Waiting time Travel Travel Travel Rotary Servomotor: → Reverse distance distance distance Pn533 by travel dis-...
- Page 291 7.6 Convenient Function to Use during Trial Operation 7.6.1 Program Jogging If Pn530 is set to n.0, n.1, n.4, or n.5, you can set Pn536 (Program Information Jogging Number of Movements) to 0 to perform infinite time operation. You cannot use infinite time operation if Pn530 is set to n.2 or n.3. If you perform infinite time operation from the Panel Operator or Digital Operator, press the MODE/SET Key or JOG/SVON Key to turn OFF the servo to end infinite time operation.
- Page 292 7.6 Convenient Function to Use during Trial Operation 7.6.1 Program Jogging • Linear Servomotors Speed Position Force Program Jogging-Related Selections Pn530 Setting Range Setting Unit Default Setting When Enabled Classification − 0000 to 0005 0000 Immediately Setup Speed Position Force Program Jogging Travel Distance Pn531 Setting Range...
- Page 293 7.6 Convenient Function to Use during Trial Operation 7.6.1 Program Jogging Set the operating conditions, click the Apply Button, and then click the Run Button. A graph of the operation pattern will be displayed. Click the Servo ON Button and then the Execute Button. The program jogging operation will be executed.
-
Page 294: Origin Search
7.6 Convenient Function to Use during Trial Operation 7.6.2 Origin Search 7.6.2 Origin Search The origin search operation positions the motor to the origin within one rotation and the clamps it there. CAUTION Make sure that the load is not coupled when you execute an origin search. The Forward Drive Prohibit (P-OT) signal and Reverse Drive Prohibit (N-OT) signal are disabled during an origin search. -
Page 295: Test Without A Motor
7.6 Convenient Function to Use during Trial Operation 7.6.3 Test without a Motor Read the warnings and then click the OK Button. Click the Servo ON Button. Click the Forward Button or the Reverse Button. An origin search will be performed only while you hold down the mouse button. The motor will stop when the origin search has been completed. - Page 296 7.6 Convenient Function to Use during Trial Operation 7.6.3 Test without a Motor SERVOPACK Simulates operation without a motor. Reference Reference Host controller Response Response Use Pn00C = n.X to enable or disable the test without a motor. Parameter Meaning When Enabled Classification n.0 Disable tests without a motor.
- Page 297 7.6 Convenient Function to Use during Trial Operation 7.6.3 Test without a Motor • Linear Servomotors Motor Connection Information That Is Used Source of Information Status Motor information Information in the motor that is connected Linear encoder informa- tion Connected •...
- Page 298 7.6 Convenient Function to Use during Trial Operation 7.6.3 Test without a Motor Restrictions The following functions cannot be used during the test without a motor. • Regeneration and dynamic brake operation • Brake output signal Refer to the following section for information on confirming the brake output signal. 9.2.3 I/O Signal Monitor on page 9-5 •...
- Page 299 7.6 Convenient Function to Use during Trial Operation 7.6.3 Test without a Motor SigmaWin+ Panel Operator or Digital Operator Executable? Reference Menu Bar SigmaWin+ Function Motor Not Motor Fn No. Utility Function Name Button Name Connected Connected Autotuning without Advanced Autotuning ×...
-
Page 300: Tuning
Tuning This chapter provides information on the flow of tuning, details on tuning functions, and related operating proce- dures. Overview and Flow of Tuning ... 8-4 8.1.1 Tuning Functions ......8-5 8.1.2 Diagnostic Tool . - Page 301 Autotuning without Host Reference ..8-23 8.6.1 Outline ....... .8-23 8.6.2 Restrictions .
- Page 302 8.11.7 Proportional Control (P Control) ... . 8-65 8.12 Manual Tuning ..... . 8-67 8.12.1 Tuning the Servo Gains .
-
Page 303: Overview And Flow Of Tuning
8.1 Overview and Flow of Tuning Overview and Flow of Tuning Tuning is performed to optimize response by adjusting the servo gains in the SERVOPACK. The servo gains are set using a combination of parameters, such as parameters for the speed loop gain, position loop gain, filters, friction compensation, and moment of inertia ratio. -
Page 304: Tuning Functions
8.1 Overview and Flow of Tuning 8.1.1 Tuning Functions 8.1.1 Tuning Functions The following table provides an overview of the tuning functions. Applicable Con- Tuning Function Outline Reference trol Methods This automatic adjustment function is designed to enable stable operation without servo tuning. This Speed control or Tuning-less Function function can be used to obtain a stable response... -
Page 305: Diagnostic Tool
8.1 Overview and Flow of Tuning 8.1.2 Diagnostic Tool 8.1.2 Diagnostic Tool You can use the following tools to measure the frequency characteristics of the machine and set notch filters. Applicable Diagnostic Tool Outline Reference Control Methods The machine is subjected to vibration to detect Speed control, Mechanical Analysis resonance frequencies. -
Page 306: Monitoring Methods
8.2 Monitoring Methods Monitoring Methods You can use the data tracing function of the SigmaWin+ or the analog monitor signals of the SERVOPACK for monitoring. If you perform custom tuning or manual tuning, always use the above functions to monitor the machine operating status and SERVOPACK signal waveform while you adjust the servo gains. -
Page 307: Precautions To Ensure Safe Tuning
8.3 Precautions to Ensure Safe Tuning 8.3.1 Overtravel Settings Precautions to Ensure Safe Tuning CAUTION Observe the following precautions when you perform tuning. • Do not touch the rotating parts of the motor when the servo is ON. • Before starting the Servomotor, make sure that an emergency stop can be performed at any time. - Page 308 8.3 Precautions to Ensure Safe Tuning 8.3.3 Setting the Position Deviation Overflow Alarm Level Position Deviation Overflow Alarm Level (Pn520) [setting unit: reference units] • Rotary Servomotors Maximum motor speed [min Encoder resolution Pn210 × × × (1.2 to 2) Pn520 >...
-
Page 309: Vibration Detection Level Setting
8.3 Precautions to Ensure Safe Tuning 8.3.4 Vibration Detection Level Setting 8.3.4 Vibration Detection Level Setting You can set the vibration detection level (Pn312) to more accurately detect A.520 alarms (Vibration Alarm) and A.911 warnings (Vibration Warning) when vibration is detected during machine operation. -
Page 310: Tuning-Less Function
8.4 Tuning-less Function 8.4.1 Application Restrictions Tuning-less Function The tuning-less function performs autotuning to obtain a stable response regardless of the type of machine or changes in the load. Autotuning is started when the servo is turned ON. CAUTION The tuning-less function is disabled during torque control. ... -
Page 311: Operating Procedure
8.4 Tuning-less Function 8.4.2 Operating Procedure 8.4.2 Operating Procedure The tuning-less function is enabled in the default settings. No specific procedure is required. You can use the following parameter to enable or disable the tuning-less function. Parameter Meaning When Enabled Classification ... -
Page 312: Troubleshooting Alarms
8.4 Tuning-less Function 8.4.3 Troubleshooting Alarms Click the Button to adjust the response level setting. Increase the response level setting to increase the response. Decrease the response level setting to suppress vibration. The default response level setting is 4. Response Level Setting Description Remarks Response level: High... -
Page 313: Parameters Disabled By Tuning-Less Function
8.4 Tuning-less Function 8.4.4 Parameters Disabled by Tuning-less Function 8.4.4 Parameters Disabled by Tuning-less Function When the tuning-less function is enabled (Pn170 = n.1) (default setting), the parameters in the following table are disabled. Item Parameter Name Parameter Number Speed Loop Gain Pn100 Second Speed Loop Gain Pn104... -
Page 314: Estimating The Moment Of Inertia
8.5 Estimating the Moment of Inertia 8.5.1 Outline Estimating the Moment of Inertia This section describes how the moment of inertia is calculated. The moment of inertia ratio that is calculated here is used in other tuning functions. You can also estimate the moment of inertia during autotuning without a host reference. -
Page 315: Applicable Tools
8.5 Estimating the Moment of Inertia 8.5.3 Applicable Tools • When proportional control is used Note:If you specify calculating the moment of inertia, an error will occur if the /P-CON (Proportional Control) sig- nal changes to specify the proportional action during moment of inertia estimation. •... - Page 316 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Select Tuning - Tuning from the menu bar of the Main Window of the SigmaWin+. The Tuning Dialog Box will be displayed. Click the Cancel Button to cancel tuning. Click the Execute Button. Click the Execute Button.
- Page 317 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Set the conditions as required. Speed Loop Setting Area Make the speed loop settings in this area. If the speed loop response is too bad, it will not be possible to measure the moment of inertia ratio accurately.
- Page 318 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Confirm Button Click this button to display the Reference Confirmation Dialog Box. Detailed Setting Area You can change the settings by moving the bars or directly inputting the settings to cre- ate the required reference pattern.
- Page 319 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Cancel Button The Cancel Button is enabled only while data is being transferred to the SERVOPACK. You cannot use it after the transfer has been completed. Back Button This button returns you to the Connection Setting Dialog Box. It is disabled while data is being transferred.
- Page 320 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Repeat steps 8 to 9 until the Next Button is enabled. Measurements are performed from 2 to 7 times and then verified. The number of measurements is displayed in upper left corner of the dialog box. A progress bar at the bottom of the dialog box will show the progress of the transfer each time.
- Page 321 8.5 Estimating the Moment of Inertia 8.5.4 Operating Procedure Cancel Button This button will return you to the Tuning Dialog Box. Confirm that the Identified Moment of Inertia Ratio Box and the Pn103: Moment of Inertia Ratio Box show the same value and then click the Finish Button. Click the OK Button.
-
Page 322: Autotuning Without Host Reference
8.6 Autotuning without Host Reference 8.6.1 Outline Autotuning without Host Reference This section describes autotuning without a host reference. • Autotuning without a host reference performs adjustments based on the setting of the speed loop gain (Pn100). Therefore, precise adjustments cannot be made if there is vibration when adjustments are started. -
Page 323: Restrictions
8.6 Autotuning without Host Reference 8.6.2 Restrictions Rated motor speed Movement 2/3 speed References Time t Responses Rated motor speed 2/3 Motor rated torque: S _ A n a Approx. 100% SERVOPACK Travel Distance Servomotor Time t Motor rated torque: Note: Execute autotuning without a host reference after jogging to a position that ensures a suitable range of motion. -
Page 324: Applicable Tools
8.6 Autotuning without Host Reference 8.6.3 Applicable Tools Preparations Check the following settings before you execute autotuning without a host reference. • The main circuit power supply must be ON. • There must be no overtravel. • The servo must be OFF. •... - Page 325 8.6 Autotuning without Host Reference 8.6.4 Operating Procedure Click the Execute Button. Click the OK Button. Select the No Reference Input Option in the Autotuning Area and then click the Auto- tuning Button. Set the conditions in the Switching the load moment of inertia (load mass) identifica- tion Box, the Mode selection Box, the Mechanism selection Box, and the Distance Box, and then click the Next Button.
- Page 326 8.6 Autotuning without Host Reference 8.6.4 Operating Procedure • Switching the load moment of inertia (load mass) identification Box Specify whether to estimate the moment of inertia. 0: A moment of inertia is presumed. (default setting) 1: A moment of inertia is not presumed. •...
- Page 327 8.6 Autotuning without Host Reference 8.6.4 Operating Procedure Click the Servo ON Button. Click the Start tuning Button. Confirm safety around moving parts and click the Yes Button. The motor will start operating and tuning will be executed. Vibration that occurs during tuning will be detected automatically and suitable settings will be made for that vibration.
-
Page 328: Troubleshooting Problems In Autotuning Without A Host Reference
8.6 Autotuning without Host Reference 8.6.5 Troubleshooting Problems in Autotuning without a Host Reference When tuning has been completed, click the Finish Button. The results of tuning will be set in the parameters and you will return to the Tuning Dialog Box. This concludes the procedure. - Page 329 8.6 Autotuning without Host Reference 8.6.5 Troubleshooting Problems in Autotuning without a Host Reference When an Error Occurs during Execution of Autotuning without a Host Reference Error Possible Cause Corrective Action • Increase the setting of the positioning completed width (Pn522). •...
-
Page 330: Automatically Adjusted Function Settings
8.6 Autotuning without Host Reference 8.6.6 Automatically Adjusted Function Settings 8.6.6 Automatically Adjusted Function Settings You can specify whether to automatically adjust the following functions during autotuning. Automatic Notch Filters Normally, set Pn460 to n.1 (Adjust automatically) (default setting). Vibration will be detected during autotuning without a host reference and a notch filter will be adjusted. - Page 331 8.6 Autotuning without Host Reference 8.6.6 Automatically Adjusted Function Settings Vibration Suppression You can use vibration suppression to suppress transitional vibration at a low frequency from 1 Hz to 100 Hz, which is generated mainly when the machine vibrates during positioning. Normally, set Pn140 to n.1...
-
Page 332: Related Parameters
8.6 Autotuning without Host Reference 8.6.7 Related Parameters Feedforward If Pn140 is set to n.0 (Do not use model following control and speed/torque feedforward together (default setting)) and tuning is performed with the mode selection set to 2 or 3, feed- forward (Pn109), the speed feedforward input (V-REF), and the torque feedforward input (T- REF) will be disabled. - Page 333 8.6 Autotuning without Host Reference 8.6.7 Related Parameters Parameter Name Automatic Changes Pn147 Model Following Control Speed Feedforward Compensation Pn160 Anti-Resonance Control-Related Selections Pn161 Anti-Resonance Frequency Pn163 Anti-Resonance Damping Gain Pn531 Program Jogging Travel Distance Pn533 Program Jogging Movement Speed for Rotary Servomotor Pn585 Program Jogging Movement Speed for Linear Servomotor Pn534...
-
Page 334: Autotuning With A Host Reference
8.7 Autotuning with a Host Reference 8.7.1 Outline Autotuning with a Host Reference This section describes autotuning with a host reference. Autotuning with a host reference makes adjustments based on the set speed loop gain (Pn100). Therefore, precise adjustments cannot be made if there is vibration when adjustments are started. -
Page 335: Applicable Tools
8.7 Autotuning with a Host Reference 8.7.3 Applicable Tools • When the rigidity of the machine is low and vibration occurs when positioning is performed • When the position integration function is used • When proportional control is used • When mode switching is used •... - Page 336 8.7 Autotuning with a Host Reference 8.7.4 Operating Procedure Click the Execute Button. Click the OK Button. Select the Position reference input Option in the Autotuning Area and then click the Autotuning Button. Set the conditions in the Mode selection Box and the Mechanism selection Box, and then click the Next Button.
- Page 337 8.7 Autotuning with a Host Reference 8.7.4 Operating Procedure • Mode selection Box Set the mode. Mode Selection Description Standard gain adjustment is per- formed. In addition to gain adjust- 1: Standard ment, notch filters and anti- resonance control are automatically adjusted.
- Page 338 8.7 Autotuning with a Host Reference 8.7.4 Operating Procedure Turn ON the servo, enter a reference from the host controller, and then click the Start tuning Button. Confirm safety around moving parts and click the Yes Button. The motor will start operating and tuning will be executed. Vibration that occurs during tuning will be detected automatically and suitable settings will be made for that vibration.
-
Page 339: Troubleshooting Problems In Autotuning With A Host Reference
8.7 Autotuning with a Host Reference 8.7.5 Troubleshooting Problems in Autotuning with a Host Reference 8.7.5 Troubleshooting Problems in Autotuning with a Host Reference The following tables give the causes of and corrections for problems that may occur in autotun- ing with a host reference. -
Page 340: Related Parameters
8.7 Autotuning with a Host Reference 8.7.7 Related Parameters 8.7.7 Related Parameters The following parameters are automatically adjusted or used as reference when you execute autotuning with a host reference. Do not change the settings while autotuning with a host reference is being executed. Parameter Name Automatic Changes... -
Page 341: Custom Tuning
8.8 Custom Tuning 8.8.1 Outline Custom Tuning This section describes custom tuning. 8.8.1 Outline You can use custom tuning to manually adjust the servo during operation using a speed or position reference input from the host controller. You can use it to fine-tune adjustments that were made with autotuning. -
Page 342: Applicable Tools
8.8 Custom Tuning 8.8.3 Applicable Tools 8.8.3 Applicable Tools The following table lists the tools that you can use to perform custom tuning and the applicable tool functions. Tool Function Operating Procedure Reference You cannot perform custom tuning from Panel Operator –... - Page 343 8.8 Custom Tuning 8.8.4 Operating Procedure Click the Advanced adjustment Button. Click the Custom tuning Button. 8-44...
- Page 344 8.8 Custom Tuning 8.8.4 Operating Procedure Set the Tuning mode Box and Mechanism selection Box, and then click the Next But- ton. Tuning mode Box Mode Selection Description This setting gives priority to stability and preventing overshooting. In addi- 0: Set servo gains tion to gain adjustment, notch filters with priority given and anti-resonance control (except...
- Page 345 8.8 Custom Tuning 8.8.4 Operating Procedure Turn ON the servo, enter a reference from the host controller, and then click the Start tuning Button. Tuning Mode 2 to 3 Tuning Mode 0 or 1 Use the Buttons to change the tuning level. Click the Back Button during tuning to restore the setting to its original value.
- Page 346 8.8 Custom Tuning 8.8.4 Operating Procedure When tuning has been completed, click the Completed Button. The values that were changed will be saved in the SERVOPACK and you will return to the Tuning Dia- log Box. This concludes the procedure. Vibration Suppression Functions ...
-
Page 347: Automatically Adjusted Function Settings
8.8 Custom Tuning 8.8.5 Automatically Adjusted Function Settings • Auto-setting Cancel Buttons The automatically set notch filter frequencies or the anti-resonance control frequencies may not always suppress vibration. Click the Cancel Button to reset the notch filter fre- quencies or the anti-resonance control frequencies to the values from just before these frequencies were set automatically. -
Page 348: Tuning Example For Tuning Mode 2 Or 3
8.8 Custom Tuning 8.8.6 Tuning Example for Tuning Mode 2 or 3 8.8.6 Tuning Example for Tuning Mode 2 or 3 Step Measurement Display Examples Operation Position deviation The positioning time is measured after the moment of inertia ratio (Pn103) is set correctly. Tuning is completed if the specifications are met. -
Page 349: Related Parameters
8.8 Custom Tuning 8.8.7 Related Parameters 8.8.7 Related Parameters The following parameters are automatically adjusted or used as reference when you execute custom tuning. Do not change the settings while custom tuning is being executed. Parameter Name Automatic Changes Pn100 Speed Loop Gain Pn101 Speed Loop Integral Time Constant... -
Page 350: Anti-Resonance Control Adjustment
8.9 Anti-Resonance Control Adjustment 8.9.1 Outline Anti-Resonance Control Adjustment This section describes anti-resonance control. 8.9.1 Outline Anti-resonance control increases the effectiveness of vibration suppression after custom tun- ing. Anti-resonance control is effective for suppression of continuous vibration frequencies from 100 to 1,000 Hz that occur when the control gain is increased. -
Page 351: Applicable Tools
8.9 Anti-Resonance Control Adjustment 8.9.3 Applicable Tools 8.9.3 Applicable Tools The following table lists the tools that you can use to perform anti-resonance control adjust- ment and the applicable tool functions. Tool Function Operating Procedure Reference Panel Operator You cannot execute anti-resonance control adjustment from the Panel Operator. Σ-7-Series Digital Operator Operating Man- Digital Operator Fn204... - Page 352 8.9 Anti-Resonance Control Adjustment 8.9.4 Operating Procedure Click the Anti-res Ctrl Adj Button. The rest of the procedure depends on whether you know the vibration frequency. If you do not know the vibration frequency, click the Auto Detect Button. If you know the vibration frequency, click the Manual Set Button.
-
Page 353: Related Parameters
8.9 Anti-Resonance Control Adjustment 8.9.5 Related Parameters When the adjustment has been completed, click the Finish Button. The values that were changed will be saved in the SERVOPACK and you will return to the Tuning Dia- log Box. This concludes the procedure. 8.9.5 Related Parameters The following parameters are automatically adjusted or used as reference when you execute... -
Page 354: Vibration Suppression
8.10 Vibration Suppression 8.10.1 Outline 8.10 Vibration Suppression This section describes vibration suppression. 8.10.1 Outline You can use vibration suppression to suppress transient vibration at a low frequency from 1 Hz to 100 Hz, which is generated mainly when the machine vibrates during positioning. This is effective for vibration frequencies for which notch filters and anti-resonance control adjustment are not effective. -
Page 355: Preparations
8.10 Vibration Suppression 8.10.2 Preparations The vibration frequencies that are automatically detected may vary somewhat with each posi- Information tioning operation. Perform positioning several times and make adjustments while checking the effect of vibration suppression. 8.10.2 Preparations Check the following settings before you execute vibration suppression. •... - Page 356 8.10 Vibration Suppression 8.10.4 Operating Procedure Frequency detection will not be performed if there is no vibration or if the vibration frequency is outside the range of detectable frequencies. If a vibration frequency is not detected, pro- vide a means of measuring the vibration frequency. Important Click the Set Button.
-
Page 357: Setting Combined Functions
8.10 Vibration Suppression 8.10.5 Setting Combined Functions Vibration suppression will be enabled in step 5. The motor response, however, will change when the Servomotor comes to a stop with no reference input. Important This concludes the procedure. 8.10.5 Setting Combined Functions You can also use the feedforward function when you execute vibration suppression. -
Page 358: Additional Adjustment Functions
8.11 Additional Adjustment Functions 8.11.1 Gain Switching 8.11 Additional Adjustment Functions This section describes the functions that you can use to make adjustments after you perform autotuning without a host reference, autotuning with a host reference, and custom tuning. Function Applicable Control Methods Reference Gain Switching... - Page 359 8.11 Additional Adjustment Functions 8.11.1 Gain Switching Manual Gain Switching With manual gain switching, you use the /G-SEL (Gain Selection) signal to change between gain settings 1 and gain settings 2. Type Signal Connector Pin No. Setting Meaning Changes the gain settings to gain settings 1. Input /G-SEL Must be allocated.
- Page 360 8.11 Additional Adjustment Functions 8.11.1 Gain Switching Relationship between the Waiting Times and Switching Times for Gain Switching In this example, an ON /COIN (Positioning Completion) signal is set as condition A for auto- matic gain switching. The position loop gain is changed from the value in Pn102 (Position Loop Gain) to the value in Pn106 (Second Position Loop Gain).
-
Page 361: Friction Compensation
8.11 Additional Adjustment Functions 8.11.2 Friction Compensation Continued from previous page. Position Second Position Loop Gain Pn106 Setting Range Setting Unit Default Setting When Enabled Classification 10 to 20,000 0.1/s Immediately Tuning Speed Position Torque First Stage Second Torque Reference Filter Time Constant Pn412 Setting Range Setting Unit... - Page 362 8.11 Additional Adjustment Functions 8.11.2 Friction Compensation Parameter Function When Enabled Classification Disable friction compensation. (default setting) Pn408 Immediately Setup Enable friction compensation. Speed Position Friction Compensation Gain Pn121 Setting Range Setting Unit Default Setting When Enabled Classification 10 to 1,000 Immediately Tuning...
-
Page 363: Current Control Mode Selection
8.11 Additional Adjustment Functions 8.11.3 Current Control Mode Selection Step Operation Effect of Adjustments The following graphs show the response with and without adjustment. Analog Stable response due to Inconsistent response friction compensation because of friction Low friction Position deviation Position deviation High friction Position reference speed... -
Page 364: Speed Detection Method Selection
8.11 Additional Adjustment Functions 8.11.5 Speed Detection Method Selection 8.11.5 Speed Detection Method Selection You can use the speed detection method selection to ensure smooth Servomotor speed changes during operation. To ensure smooth motor speed changes during operation, set Pn009 to n.1 (Use speed detection 2). With a Linear Servomotor, you can reduce the noise level of the running motor when the linear encoder scale pitch is large. - Page 365 8.11 Additional Adjustment Functions 8.11.7 Proportional Control (P Control) When Using the Default Input Signal Allocations Example SERVOPACK Changing between P and PI control /P-CON Note:This example uses the default input signal allocations. Control Methods and P Control Input Signals Changing to P control is enabled when the control method is set to speed control or position control.
-
Page 366: Manual Tuning
Encoder SERVOPACK Host controller Kp: Position loop gain (Pn102) (Not provided by Yaskawa) Kv: Speed loop gain (Pn100) Ti: Speed loop integral time constant (Pn101) Tf: First stage first torque reference filter time constant (Pn401) Figure 8.1 Simplified Block Diagram for Position Control In order to manually tune the servo gains, you must understand the configuration and charac- teristic of the SERVOPACK and adjust the servo gains individually. - Page 367 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains Precautions Vibration may occur while you are tuning the servo gains. We recommend that you enable vibration alarms (Pn310 = n.2) to detect vibration. Refer to the following section for infor- mation on vibration detection. 6.15 Initializing the Vibration Detection Level on page 6-93 Vibration alarms are not detected for all vibration.
- Page 368 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains For machines for which a high position loop gain (Pn102) cannot be set, overflow alarms can Information occur during high-speed operation. If that is the case, you can increase the setting of the fol- lowing parameter to increase the level for alarm detection.
- Page 369 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains Torque-Related Torque-Related Function Function Selections 1 Selections 2 Pn408 Pn416 Torque Torque Fourth Fifth First Second First Second Third stage first stage stage stage stage stage stage reference reference notch filter: torque second notch filter: notch filter:...
- Page 370 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains Q = 0.7 Q = 1.0 Frequency [Hz] Q = 0.5 Note: The above notch filter frequency characteristics are based on calculated values and may be different from actual characteristics. • Notch Filter Depth The setting of the notch filter depth determines the depth of the frequencies that are filtered for the notch filter frequency.
- Page 371 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains Speed Position Torque First Stage Notch Filter Frequency Pn409 Setting Range Setting Unit Default Setting When Enabled Classification 50 to 5,000 1 Hz 5,000 Immediately Tuning Speed Position Torque First Stage Notch Filter Q Value Pn40A Setting Range Setting Unit...
- Page 372 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains • Do not set notch filter frequencies (Pn409, Pn40C, Pn417, Pn41A, and Pn41D) that are close to the speed loop’s response frequency. Set a frequency that is at least four times the speed loop gain (Pn100).
- Page 373 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains • Speed Loop Gain (Pn100 [Hz]) and Second Stage Second Torque Reference Filter Frequency (Pn40F [Hz]) Critical gain: Pn40F [Hz] > 4 × Pn100 [Hz] Note: Set the second stage second notch filter Q value (Pn410) to 0.70. •...
- Page 374 Encoder SERVOPACK Host controller Kp: Position loop gain (Pn102) (Not provided by Yaskawa) Kv: Speed loop gain (Pn100) Ti: Speed loop integral time constant (Pn101) Tf: First stage first torque reference filter time constant (Pn401) mKp: Model following control gain (Pn141)
- Page 375 8.12 Manual Tuning 8.12.1 Tuning the Servo Gains Parameter Function When Enabled Classification Do not use model following control. (default setting) Use model following control. Do not perform vibration suppression. Pn140 Immediately Tuning (default setting) Perform vibration suppression for a specific ...
-
Page 376: Compatible Adjustment Functions
8.12 Manual Tuning 8.12.2 Compatible Adjustment Functions Position Model Following Control Speed Feedforward Compensation Pn147 Setting Range Setting Unit Default Setting When Enabled Classification 0 to 10,000 0.1% 1,000 Immediately Tuning Model Following Control Type Selection When you enable model following control, you can select the model following control type. Nor- mally, set Pn14F to n.1 (Use model following control type 2) (default setting). - Page 377 8.12 Manual Tuning 8.12.2 Compatible Adjustment Functions Examples of Connections to Host Controllers When SERVOPACK Performs Speed Control Host controller SERVOPACK (speed control) Pn415 Pn426 Pn400 T-REF Differ- Differ- Torque reference Torque feedforward T-REF filter time ential ential input gain average movement time constant...
- Page 378 8.12 Manual Tuning 8.12.2 Compatible Adjustment Functions Torque feedforward average movement time Pn426 Setting Range Setting Unit Default Setting When Enabled Classification 0 to 5,100 0.1 ms Immediately Setup Note: 1. Overshooting will occur if you set the torque feedforward too high. Set the optimum value while monitoring the response.
- Page 379 8.12 Manual Tuning 8.12.2 Compatible Adjustment Functions Related Parameters Select the switching condition for mode switching with Pn10B = n.X. Parameter That Sets the Level Mode Switching When Parameter Classification Selection Enabled Rotary Linear Servomotor Servomotor Use the internal ...
- Page 380 8.12 Manual Tuning 8.12.2 Compatible Adjustment Functions Speed reference Motor speed Speed Time Torque reference +Pn10C Torque reference 0 - Pn10C PI control PI control Using the Speed Reference as the Mode Switching Condition • Rotary Servomotors When the speed reference equals or exceeds the speed set for the mode switching level for a speed reference (Pn10D), the speed loop is changed to P control.
- Page 381 PI control Position Integral The position integral is the integral function of the position loop. It is used for the electronic cams and electronic shafts when using the SERVOPACK with a Yaskawa MP3000-Series Machine Controller. Position Position Integral Time Constant...
-
Page 382: Diagnostic Tools
8.13 Diagnostic Tools 8.13.1 Mechanical Analysis 8.13 Diagnostic Tools 8.13.1 Mechanical Analysis Overview You can connect the SERVOPACK to a computer to measure the frequency characteristics of the machine. This allows you to measure the frequency characteristics of the machine without using a measuring instrument. - Page 383 8.13 Diagnostic Tools 8.13.1 Mechanical Analysis Frequency Characteristics The motor is used to cause the machine to vibrate and the frequency characteristics from the torque to the motor speed are measured to determine the machine characteristics. For a nor- mal machine, the resonance frequencies are clear when the frequency characteristics are plot- ted on graphs with the gain and phase (Bode plots).
-
Page 384: Easy Fft
8.13 Diagnostic Tools 8.13.2 Easy FFT 8.13.2 Easy FFT The machine is made to vibrate and a resonance frequency is detected from the generated vibration to set notch filters according to the detected resonance frequencies. This is used to eliminate high-frequency vibration and noise. During execution of Easy FFT, a frequency waveform reference is sent from the SERVOPACK to the Servomotor to automatically cause the shaft to rotate multiple times within 1/4th of a rota- tion, thus causing the machine to vibrate. - Page 385 8.13 Diagnostic Tools 8.13.2 Easy FFT Click the OK Button. Another EasyFFT Dialog Box will be displayed. Click the Servo ON Button. Select the instruction (reference) amplitude and the rotation direction in the Measure- ment condition Area, and then click the Start Button. The motor shaft will rotate and measurements will start.
- Page 386 8.13 Diagnostic Tools 8.13.2 Easy FFT When measurements have been completed, the measurement results will be displayed. Check the results in the Measurement result Area and then click the Measurement complete Button. Click the Result Writing Button if you want to set the measurement results in the param- eters.
- Page 387 8.13 Diagnostic Tools 8.13.2 Easy FFT Related Parameters The following parameters are automatically adjusted or used as reference when you execute Easy FFT. Do not change the settings of these parameters during execution of Easy FFT. Parameter Name Automatic Changes Pn408 Torque-Related Function Selections Pn409...
-
Page 388: Monitoring
Monitoring This chapter provides information on monitoring SERVO- PACK product information and SERVOPACK status. Monitoring Product Information ..9-2 9.1.1 Items That You Can Monitor ....9-2 9.1.2 Operating Procedures . -
Page 389: Monitoring Product Information
9.1 Monitoring Product Information 9.1.1 Items That You Can Monitor Monitoring Product Information 9.1.1 Items That You Can Monitor Monitor Items • SERVOPACK model • SERVOPACK software version • SERVOPACK special specifications Information on SERVOPACKs • SERVOPACK serial number • SERVOPACK manufacturing date •... -
Page 390: Monitoring Servopack Status
9.2 Monitoring SERVOPACK Status 9.2.1 System Monitor Monitoring SERVOPACK Status 9.2.1 System Monitor Use one of the following methods to display the System Monitor Window. • Start the SigmaWin+. The System Monitor Window will be automatically displayed. • Select Monitor - Monitor - System Monitor from the menu bar of the Main Window of the SigmaWin+. - Page 391 9.2 Monitoring SERVOPACK Status 9.2.2 Monitoring Status and Operations Monitor Items The items that you can monitor on the Status Monitor Window and Motion Monitor Window are listed below. • Status Monitor Window Monitor Items • Main Circuit • /S-ON (Servo ON Input Signal) •...
-
Page 392: I/O Signal Monitor
9.2 Monitoring SERVOPACK Status 9.2.3 I/O Signal Monitor 9.2.3 I/O Signal Monitor Use the following procedure to check I/O signals. Select Monitor - Check Wiring from the menu bar of the Main Window of the Sig- maWin+. Click the Monitor Mode Button. Analog Input signal status Output signal status... -
Page 393: Monitoring Machine Operation Status And Signal Waveforms
9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.1 Items That You Can Monitor Monitoring Machine Operation Status and Signal Waveforms To monitor waveforms, use the SigmaWin+ trace function or a measuring instrument, such as a memory recorder. 9.3.1 Items That You Can Monitor You can use the SigmaWin+ or a measuring instrument to monitor the shaded items in the fol- lowing block diagram. -
Page 394: Using The Sigmawin
9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.2 Using the SigmaWin+ 9.3.2 Using the SigmaWin+ This section describes how to trace data and I/O with the SigmaWin+. Refer to the following manual for detailed operating procedures for the SigmaWin+. AC Servo Drives Engineering Tool SigmaWin+ Online Manual Σ-7 Component (Manual No.: SIEP S800001 48) Operating Procedure Select Trace - Trace from the menu bar of the Main Window of the SigmaWin+. -
Page 395: Using A Measuring Instrument
Connect a measuring instrument, such as a memory recorder, to the analog monitor connector (CN5) on the SERVOPACK to monitor analog signal waveforms. The measuring instrument is not provided by Yaskawa. Refer to the following section for details on the connection. - Page 396 9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.3 Using a Measuring Instrument Setting the Monitor Object Use Pn006 = n.XX and Pn007 = n.XX (Analog Monitor 1 and 2 Signal Selections) to set the items to monitor. Line Color Signal Parameter Setting ...
- Page 397 9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.3 Using a Measuring Instrument Changing the Monitor Factor and Offset You can change the monitor factors and offsets for the output voltages for analog monitor 1 and analog monitor 2. The relationships to the output voltages are as follows: Analog Monitor 1 Signal Analog Monitor 1 Analog Monitor 1...
- Page 398 9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.3 Using a Measuring Instrument Adjustment Example An example of adjusting the output of the motor speed monitor is provided below. Offset Adjustment Gain Adjustment Analog monitor output voltage Analog monitor output voltage 1 [V] Gain adjustment...
- Page 399 9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.3 Using a Measuring Instrument • Gain Adjustment Tool Function Operating Procedure Reference 13.4.12 Adjust Analog Monitor Output Gain Panel Operator Fn00D (Fn00D) on page 13-19 Σ-7-Series Digital Operator Operating Manual Digital Operator Fn00D (Manual No.: SIEP S800001 33) ...
- Page 400 9.3 Monitoring Machine Operation Status and Signal Waveforms 9.3.3 Using a Measuring Instrument While watching the analog monitor, use the +1 and -1 Buttons to adjust the offset. There are two channels: CH1 and CH2. If necessary, click the down arrow on the Channel Box and select the channel.
-
Page 401: Monitoring Product Life
9.4 Monitoring Product Life 9.4.1 Items That You Can Monitor Monitoring Product Life 9.4.1 Items That You Can Monitor Monitor Items • SERVOPACK Installation Environment • Servomotor Installation Environment • Built-in Fan Service Life Prediction • Capacitor Service Life Prediction •... -
Page 402: Fully-Closed Loop Control
Fully-Closed Loop Control This chapter provides detailed information on performing fully-closed loop control with the SERVOPACK. 10.1 Fully-Closed System ....10-2 10.2 SERVOPACK Commissioning Procedure . 10-3 10.3 Parameter Settings for Fully-Closed Loop Control . -
Page 403: Fully-Closed System
Encoder Cable* External encoder (Not provided by Yaskawa.) The connected devices and cables depend on the type of external linear encoder that is used. Note: Refer to the following section for details on connections that are not shown above, such as connections to power supplies and peripheral devices. -
Page 404: Servopack Commissioning Procedure
10.2 SERVOPACK Commissioning Procedure 10.2 SERVOPACK Commissioning Procedure First, confirm that the SERVOPACK operates correctly with semi-closed loop control, and then confirm that it operates correctly with fully-closed loop control. The commissioning procedure for the SERVOPACK for fully-closed loop control is given below. Con- Required Parameter Step... - Page 405 10.2 SERVOPACK Commissioning Procedure Continued from previous page. Con- Required Parameter Step Description Operation trolling Settings Device Perform a program jog- Perform a program jogging opera- ging operation. tion and confirm that the travel dis- • Pn530 to Pn536 (pro- Items to Check tance is the same as the reference SERVO-...
-
Page 406: Parameter Settings For Fully-Closed Loop Control
10.3 Parameter Settings for Fully-Closed Loop Control 10.3.1 Control Block Diagram for Fully-Closed Loop Control 10.3 Parameter Settings for Fully-Closed Loop Control This section describes the parameter settings that are related to fully-closed loop control. Position Speed Torque Parameter to Set Setting Reference Control... -
Page 407: Setting The Motor Direction And The Machine Movement Direction
10.3 Parameter Settings for Fully-Closed Loop Control 10.3.2 Setting the Motor Direction and the Machine Movement Direction 10.3.2 Setting the Motor Direction and the Machine Movement Direction You must set the motor direction and the machine movement direction. To perform fully-closed loop control, you must set the motor rotation direction with both Pn000 = n.X (Direction Selection) and Pn002 = n.X... -
Page 408: Setting The Number Of External Encoder Scale Pitches
10.3 Parameter Settings for Fully-Closed Loop Control 10.3.3 Setting the Number of External Encoder Scale Pitches 10.3.3 Setting the Number of External Encoder Scale Pitches Set the number of external encoder scale pitches per motor rotation in Pn20A. Number of external encoder Setting Example pitches per motor rotation External encoder... -
Page 409: External Absolute Encoder Data Reception Sequence
10.3 Parameter Settings for Fully-Closed Loop Control 10.3.5 External Absolute Encoder Data Reception Sequence If the setting is 20 and the speed is 1,600 mm/s, the output frequency would be 1.6 Mpps Example 1600 mm/s = 1,600,000 = 1.6 Mpps 0.001 mm Because 1.6 Mpps is less than 6.4 Mpps, this setting can be used. -
Page 410: Analog Monitor Signal Settings
10.3 Parameter Settings for Fully-Closed Loop Control 10.3.8 Analog Monitor Signal Settings Setting Example Increase the value if the belt slips or is twisted excessively. If this parameter is set to 0, the external encoder value will be read as it is. If you use the default setting of 20, the second rotation will start with the deviation for the first motor rotation multiplied by 0.8. - Page 411 Safety Functions This chapter provides detailed information on the safety functions of the SERVOPACK. 11.1 Introduction to the Safety Functions ..11-3 11.1.1 Safety Functions ......11-3 11.1.2 Precautions for Safety Functions .
- Page 412 11.6 Connecting a Safety Function Device . . 11-13 11-2...
-
Page 413: Safety Functions
11.1 Introduction to the Safety Functions 11.1.1 Safety Functions 11.1 Introduction to the Safety Functions 11.1.1 Safety Functions Safety functions are built into the SERVOPACK to reduce the risks associated with using the machine by protecting workers from the hazards of moving machine parts and otherwise increasing the safety of machine operation. -
Page 414: Hard Wire Base Block (Hwbb)
11.2 Hard Wire Base Block (HWBB) 11.2.1 Risk Assessment 11.2 Hard Wire Base Block (HWBB) A hard wire base block (abbreviated as HWBB) is a safety function that is designed to shut OFF the current to the motor with a hardwired circuit. The drive signals to the Power Module that controls the motor current are controlled by the cir- cuits that are independently connected to the two input signal channels to turn OFF the Power Module and shut OFF the motor current. -
Page 415: Hard Wire Base Block (Hwbb) State
11.2 Hard Wire Base Block (HWBB) 11.2.2 Hard Wire Base Block (HWBB) State • Direct Drive Servomotor: 1/20 rotation max. (rotational angle calculated at the motor shaft) • Linear Servomotor: 50 mm max. • The HWBB does not shut OFF the power to the SERVOPACK or electrically isolate it. Imple- ment measures to shut OFF the power supply to the SERVOPACK before you perform main- tenance on it. -
Page 416: Detecting Errors In Hwbb Signal
11.2 Hard Wire Base Block (HWBB) 11.2.4 Detecting Errors in HWBB Signal 11.2.4 Detecting Errors in HWBB Signal If only the /HWBB1 or the /HWBB2 signal is input, an A.Eb1 alarm (Safety Function Signal Input Timing Error) will occur unless the other signal is input within 10 seconds. This makes it possi- ble to detect failures, such as disconnection of an HWBB signal. -
Page 417: S-Rdy (Servo Ready Output) Signal
11.2 Hard Wire Base Block (HWBB) 11.2.7 /S-RDY (Servo Ready Output) Signal 11.2.7 /S-RDY (Servo Ready Output) Signal The /S-ON (Servo ON) signal will not be acknowledged in the HWBB state. Therefore, the Servo Ready Output Signal will turn OFF. The Servo Ready Output Signal will turn ON if both the /HWBB1 and /HWBB2 signals are ON and the /S-ON signal is turned OFF (BB state). -
Page 418: Stopping Methods
11.2 Hard Wire Base Block (HWBB) 11.2.9 Stopping Methods 11.2.9 Stopping Methods If the /HWBB1 or /HWBB2 signal turns OFF and the HWBB operates, the Servomotor will stop according to the stop mode that is set for stopping the Servomotor when the servo turns OFF (Pn001 = n.X). -
Page 419: Edm1 (External Device Monitor)
11.3 EDM1 (External Device Monitor) 11.3.1 EDM1 Output Signal Specifications 11.3 EDM1 (External Device Monitor) The EDM1 (External Device Monitor) signal is used to monitor failures in the HWBB. Connect the monitor signal as a feedback signal, e.g., to the Safety Unit. Note: To meet performance level e (PLe) in EN ISO 13849-1, the EDM signal must be monitored by the host con- troller. -
Page 420: Applications Examples For Safety Functions
11.4 Applications Examples for Safety Functions 11.4.1 Connection Example 11.4 Applications Examples for Safety Functions This section provides examples of using the safety functions. 11.4.1 Connection Example In the following example, a Safety Unit is used and the HWBB operates when the guard is opened. -
Page 421: Procedure
11.4 Applications Examples for Safety Functions 11.4.3 Procedure 11.4.3 Procedure Request is received to open the guard. If the motor is operating, a stop command is received from the host controller, the motor stops, and the servo is turned OFF. The guard is opened. -
Page 422: Validating Safety Functions
11.5 Validating Safety Functions 11.5 Validating Safety Functions When you commission the system or perform maintenance or SERVOPACK replacement, you must always perform the following validation test on the HWBB after completing the wiring. (It is recommended that you keep the confirmation results as a record.) •... -
Page 423: Connecting A Safety Function Device
11.6 Connecting a Safety Function Device 11.6 Connecting a Safety Function Device Use the following procedure to connect a safety function device. Remove the Safety Jumper Connector from the connector for the safety function device (CN8). Enlarged View Hold the Safety Jumper Connector between your Safety Jumper fingers and remove it. -
Page 424: Maintenance
Maintenance This chapter provides information on the meaning of, causes of, and corrections for alarms and warnings. 12.1 Inspections and Part Replacement ..12-2 12.1.1 Inspections ......12-2 12.1.2 Guidelines for Part Replacement . -
Page 425: Inspections And Part Replacement
After an examination of the part in question, we will determine whether the part should be replaced. The parameters of any SERVOPACKs that are sent to Yaskawa for part replacement are reset to the factory settings before they are returned to you. Always keep a record of the parameter set- tings. -
Page 426: Replacing The Battery
12.1 Inspections and Part Replacement 12.1.3 Replacing the Battery 12.1.3 Replacing the Battery If the battery voltage drops to approximately 2.7 V or less, an A.830 alarm (Encoder Battery Alarm) or an A.930 warning (Encoder Battery Warning) will be displayed. If this alarm or warning is displayed, the battery must be replaced. - Page 427 12.1 Inspections and Part Replacement 12.1.3 Replacing the Battery When Using an Encoder Cable with a Battery Case Turn ON only the control power supply to the SERVOPACK. If you remove the Battery or disconnect the Encoder Cable while the control power supply to the SERVOPACK is OFF, the absolute encoder data will be lost.
-
Page 428: Alarm Displays
12.2 Alarm Displays 12.2.1 List of Alarms 12.2 Alarm Displays If an error occurs in the SERVOPACK, an alarm number will be displayed on the panel display. Analog An alarm number flashes on the display. This section provides a list of the alarms that may occur and the causes of and corrections for those alarms. - Page 429 12.2 Alarm Displays 12.2.1 List of Alarms Continued from previous page. Servo- Alarm Code Alarm motor Output Alarm Reset Alarm Name Alarm Meaning Stop- Number Possi- ping ALO1 ALO2 ALO3 ble? Method The setting of Pn212 (Encoder Output Pulses) or Encoder Output Pulse Pn281 (Encoder Output Res- A.041...
- Page 430 12.2 Alarm Displays 12.2.1 List of Alarms Continued from previous page. Servo- Alarm Code Alarm motor Output Alarm Reset Alarm Name Alarm Meaning Stop- Number Possi- ping ALO1 ALO2 ALO3 ble? Method • Rotary Servomotor: The pulse output speed for the setting of Pn212 (Encoder Output Pulses) was Encoder Output Pulse...
- Page 431 12.2 Alarm Displays 12.2.1 List of Alarms Continued from previous page. Servo- Alarm Code Alarm motor Output Alarm Reset Alarm Name Alarm Meaning Stop- Number Possi- ping ALO1 ALO2 ALO3 ble? Method The encoder was operating A.850 Encoder Overspeed at high speed when the Gr.1 power was turned ON.
- Page 432 12.2 Alarm Displays 12.2.1 List of Alarms Continued from previous page. Servo- Alarm Code Alarm motor Output Alarm Reset Alarm Name Alarm Meaning Stop- Number Possi- ping ALO1 ALO2 ALO3 ble? Method An error occurred in the A.C21 Polarity Sensor Error Gr.1 polarity sensor.
- Page 433 12.2 Alarm Displays 12.2.1 List of Alarms Continued from previous page. Servo- Alarm Code Alarm motor Output Alarm Reset Alarm Name Alarm Meaning Stop- Number Possi- ping ALO1 ALO2 ALO3 ble? Method If position deviation remains in the deviation counter, the setting of Pn529 or Pn584 (Speed Limit Level at Servo ON) limits the speed when...
-
Page 434: Troubleshooting Alarms
12.2.2 Troubleshooting Alarms 12.2.2 Troubleshooting Alarms The causes of and corrections for the alarms are given in the following table. Contact your Yaskawa representative if you cannot solve a problem with the correction given in the table. Reference Alarm Number: Possible Cause... - Page 435 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion A.024: System Alarm (An The SERVOPACK may be A failure occurred in internal program faulty. Replace the SER- –...
- Page 436 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The speed of program jogging went below Check to see if the the setting range Decrease the setting of when the electronic the electronic gear ratio detection conditions...
- Page 437 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Set the parameters for a Linear Servomotor and A Rotary Servomotor reset the motor type was removed and a A.070: –...
- Page 438 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The Main Circuit Cable is not wired Check the wiring. Correct the wiring. correctly or there is faulty contact. Check for short-circuits across Servomotor There is a short-circuit...
- Page 439 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Check the regenerative load ratio in the Sig- Change the regenerative The SERVOPACK maWin+ Motion Monitor resistance to a value regenerative resis- Tab Page to see how larger than the SERVO-...
- Page 440 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Implement countermea- Improve the noise envi- sures against noise, such ronment, e.g. by as correct wiring of the A malfunction was improving the wiring or A.101:...
- Page 441 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The power supply Set the power supply volt- Measure the power voltage exceeded the age within the specified –...
- Page 442 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion If you are using the regen- The regenerative erative resistor built into resistor was discon- Measure the resistance the SERVOPACK, replace nected when the of the regenerative...
- Page 443 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The power supply Set the AC/DC power Measure the power voltage exceeded the supply voltage within the – supply voltage.
- Page 444 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The order of phases U, V, and W in the Check the wiring of the Make sure that the Servo- –...
- Page 445 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The wiring is not cor- Make sure that the Servo- rect or there is a faulty Check the wiring. motor and encoder are page 4-19 contact in the motor...
- Page 446 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Check the surrounding temperature using a Decrease the surround- thermostat. Or, check ing temperature by The surrounding tem- the operating status improving the SERVO- –...
- Page 447 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Remove foreign matter from the SERVOPACK. A.7AB: The fan inside the If an alarm still occurs, the Check for foreign matter SERVOPACK SERVOPACK SERVOPACK may be...
- Page 448 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Turn the power supply to the SERVOPACK OFF and ON again. The encoder malfunc- If an alarm still occurs, the –...
- Page 449 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The surrounding air Reduce the surrounding Measure the surround- temperature around air temperature of the ing air temperature –...
- Page 450 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Setting the origin of Before you set the ori- the absolute linear gin, use the fully-closed The motor must be encoder failed feedback pulse counter stopped while setting the...
- Page 451 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion A malfunction occurred in the read- Reset the alarm and ing section for the – page 12-40 restart operation. torque reference A.b20: input.
- Page 452 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Turn the power supply to the SERVOPACK OFF and ON again. A.bF4: A failure occurred in If an alarm still occurs, the –...
- Page 453 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The settings of Pn282 (Linear Encoder Pitch) Check the linear and Pn080 = n.X The parameter set- encoder specifications page 5-19, (Motor Phase Selection) tings are not correct.
- Page 454 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Wire the overtravel sig- A.C51: nals. Execute polarity The overtravel signal Check the overtravel detection at a position Overtravel was detected during page 4-31...
- Page 455 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion There is a faulty con- tact in the connector Reconnect the encoder Check the condition of or the connector is connector and check the page 4-19 the encoder connector.
- Page 456 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion Noise entered on the Implement countermea- signal line from the – sures against noise for the page 4-5 encoder.
- Page 457 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The encoder is wired Make sure that the Check the wiring of the incorrectly or there is encoder is correctly page 4-19 encoder.
- Page 458 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The cable between the Serial Converter Correctly wire the cable Unit and SERVOPACK Check the wiring of the between the Serial Con- page 4-21 is not wired correctly...
- Page 459 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The servo was turned Set the position deviation ON after the position A.d01: to be cleared while the deviation exceeded Check the position servo is OFF.
- Page 460 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion The output signal circuits or devices for /HWBB1 The delay between and /HWBB2 or the SER- activation of the VOPACK input signal cir- /HWBB1 and Measure the time delay...
- Page 461 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms Continued from previous page. Reference Alarm Number: Possible Cause Confirmation Correction for Correc- Alarm Name tion FL-1 System Alarm Turn the power supply to FL-2 the SERVOPACK OFF and System Alarm ON again. FL-3 A failure occurred in If an alarm still occurs, the –...
- Page 462 12.2 Alarm Displays 12.2.2 Troubleshooting Alarms 1/3 Rated motor speed [mm/s] Resolution of Serial Converter Unit Pn20E ≦ Pn210 Linear encoder pitch [m] Pn385 [100 mm/s] Resolution of Serial Converter Unit Pn20E ≧ Approx. 6.10 10 Pn210 Linear encoder pitch [m] These alarms are not stored in the alarm history.
-
Page 463: Resetting Alarms
12.2 Alarm Displays 12.2.3 Resetting Alarms 12.2.3 Resetting Alarms If there is an ALM (Servo Alarm) signal, use one of the following methods to reset the alarm after eliminating the cause of the alarm. The /ALM-RST (Alarm Reset) signal will not always reset encoder-related alarms. If you cannot reset an alarm with the /ALM-RST signal, turn OFF the control power supply to reset it. -
Page 464: Displaying The Alarm History
12.2 Alarm Displays 12.2.4 Displaying the Alarm History 12.2.4 Displaying the Alarm History The alarm history displays up to the last ten alarms that have occurred in the SERVOPACK. Preparations No preparations are required. Applicable Tools The following table lists the tools that you can use to display the alarm history and the applica- ble tool functions. -
Page 465: Clearing The Alarm History
12.2 Alarm Displays 12.2.5 Clearing the Alarm History 12.2.5 Clearing the Alarm History You can clear the alarm history that is recorded in the SERVOPACK. The alarm history is not cleared when alarms are reset or when the SERVOPACK main circuit power is turned OFF. -
Page 466: Resetting Alarms Detected In Option Modules
12.2 Alarm Displays 12.2.6 Resetting Alarms Detected in Option Modules 12.2.6 Resetting Alarms Detected in Option Modules If any Option Modules are attached to the SERVOPACK, the SERVOPACK detects the pres- ence and models of the connected Option Modules. If it finds any errors, it outputs alarms. You can delete those alarms with this operation. - Page 467 12.2 Alarm Displays 12.2.6 Resetting Alarms Detected in Option Modules Click the OK Button. Click the OK Button. Turn the power supply to the SERVOPACK OFF and ON again. 12-44...
-
Page 468: Warning Displays
12.3 Warning Displays 12.3.1 List of Warnings 12.3 Warning Displays If a warning occurs in the SERVOPACK, an alarm number will be displayed on the panel dis- play. Warnings are displayed to warn you before an alarm occurs. This section provides a list of warnings and the causes of and corrections for warnings. 12.3.1 List of Warnings The list of warnings gives the warning name, warning meaning, and warning code in order of... -
Page 469: Troubleshooting Warnings
(Undervoltage). 12.3.2 Troubleshooting Warnings The causes of and corrections for the warnings are given in the following table. Contact your Yaskawa representative if you cannot solve a problem with the correction given in the table. Warning Number: Possible Cause... - Page 470 12.3 Warning Displays 12.3.2 Troubleshooting Warnings Continued from previous page. Warning Number: Possible Cause Confirmation Correction Reference Warning Name The wiring is not correct or there is Make sure that the Servo- a faulty contact in Check the wiring. motor and encoder are cor- –...
- Page 471 12.3 Warning Displays 12.3.2 Troubleshooting Warnings Continued from previous page. Warning Number: Possible Cause Confirmation Correction Reference Warning Name Check the surrounding temperature using a Decrease the surrounding The surrounding thermostat. Or, check temperature by improving temperature is too the operating status –...
- Page 472 12.3 Warning Displays 12.3.2 Troubleshooting Warnings Continued from previous page. Warning Number: Possible Cause Confirmation Correction Reference Warning Name Implement measures to The Servomotor Check the operation ensure that the motor will was rotated by an – status. not be rotated by an exter- external force.
- Page 473 • Implement countermea- sures against noise. One of the con- A.9B0: Replace the part. Contact sumable parts has – your Yaskawa representa- Preventative Mainte- – reached the end nance Warning tive for replacement. of its service life. 12-50...
-
Page 474: Troubleshooting Based On The Operation And Conditions Of The Servomotor
12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor This section provides troubleshooting based on the operation and conditions of the Servomo- tor, including causes and corrections. Turn OFF the Servo System before troubleshooting the items shown in bold lines in the table. - Page 475 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check between the torque reference input (T- Torque control: The torque Correctly set the con- REF) and signal ground reference input is not appro- trol method and input –...
- Page 476 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference There is a mistake in the Ser- Wire the Servomotor Check the wiring. – vomotor wiring. correctly. There is a mistake in the wir- Wire the Serial Con- ing of the encoder or Serial Check the wiring.
- Page 477 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference The setting of Pn001 = n.X (Servo OFF or Check the setting of Set Pn001 = n.X – Alarm Group 1 Stopping Pn001 = n.X.
- Page 478 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Reduce the load so that the moment of inertia ratio or mass The Servomotor vibrated ratio is within the allow- considerably while perform- Check the waveform of able value, or increase...
- Page 479 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check to see if the Correct the cable lay- The Encoder Cable was sub- Encoder Cable is bundled out so that no surge is jected to excessive noise with a high-current line or –...
- Page 480 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check to see if the servo Perform autotuning The servo gains are not bal- gains have been cor- without a host refer- page 8-23 anced.
- Page 481 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check to see if vibration from the machine occurred. Check the Servomotor Reduce machine vibra- The encoder was subjected installation (mounting sur- tion.
- Page 482 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check the servo OFF Select a Servomotor stopping method set in stopping method other Pn001 = n.X or than coasting to a stop. The selection of the Servo- Pn001 = n.X.
- Page 483 12.4 Troubleshooting Based on the Operation and Conditions of the Servomotor Continued from previous page. Problem Possible Cause Confirmation Correction Reference Check to see if vibration from the machine occurred. Check the Servomotor Reduce machine vibra- The encoder was subjected installation (mounting sur- tion.
-
Page 484: Panel Displays And Panel Operator Procedures
Panel Displays and Panel Operator Pro- cedures This chapter describes how to interpret panel displays and the operation of the Panel Operator. 13.1 Panel Operator ..... 13-3 13.1.1 Panel Operator Key Names and Functions . - Page 485 13.4.8 Autotune Analog (Speed/Torque) Reference Offset (Fn009) ......13-17 13.4.9 Manually Adjust Speed Reference Offset (Fn00A) ......13-17 13.4.10 Manually Adjust Torque Reference Offset (Fn00B) .
-
Page 486: Panel Operator
13.1 Panel Operator 13.1.1 Panel Operator Key Names and Functions 13.1 Panel Operator 13.1.1 Panel Operator Key Names and Functions The Panel Operator consists of a panel display and Panel Operator keys. You can use the Panel Operator to set parameters, display status, execute utility functions, and monitor SERVOPACK operation. -
Page 487: Status Displays
13.1 Panel Operator 13.1.3 Status Displays You can change the setting of Pn52F (Monitor Display at Startup) to display the Monitor Dis- Information play Mode instead of the Status Display Mode after the power supply is turned ON. Set Pn52F to the Un number of the monitor display to display after the power supply is turned ON. - Page 488 13.1 Panel Operator 13.1.3 Status Displays • Interpreting Codes Display Meaning Display Meaning Base Block Active Indicates that the servo is Safety Function OFF. Indicates that the SERVOPACK is in the hard wire base block state due to a Operation in Progress safety function.
-
Page 489: Parameter (Pn) Operations On The Panel Operator
13.2 Parameter (Pn) Operations on the Panel Operator 13.2.1 Setting Parameters That Require Numeric Settings 13.2 Parameter (Pn) Operations on the Panel Operator This section describes the procedures for setting the parameters that are used in this manual. Refer to the following sections for details on parameter classifications and notation. 5.1.1 Parameter Classification on page 5-4 5.1.2 Notation for Parameters on page 5-5 13.2.1 Setting Parameters That Require Numeric Settings... -
Page 490: Setting Parameters That Require Selection Of Functions
13.2 Parameter (Pn) Operations on the Panel Operator 13.2.2 Setting Parameters That Require Selection of Functions Parameters with Settings of More Than Five Digits The Panel Operator displays five digits. Settings of more than five digits are displayed as shown in the following figure. -
Page 491: Monitor Display (Un) Operations On The Panel Operator
13.3 Monitor Display (Un) Operations on the Panel Operator 13.3.1 Basic Monitor Display Operations 13.3 Monitor Display (Un) Operations on the Panel Operator You can monitor the status of the reference values and I/O signals that are set in the SERVO- PACK and the internal status of the SERVOPACK with monitor displays. -
Page 492: Output Signal Monitor (Un006)
13.3 Monitor Display (Un) Operations on the Panel Operator 13.3.3 Output Signal Monitor (Un006) The allocations are given in the following table. Display Digit Input Pin Number Signal Name (Default Setting) Number CN1-40 /SI0 (/S-ON) CN1-41 /SI3 (/P-CON) CN1-42 /SI1 (P-OT) CN1-43 /SI2 (N-OT) CN1-44... -
Page 493: Safety Input Signal Monitor (Un015)
13.3 Monitor Display (Un) Operations on the Panel Operator 13.3.4 Safety Input Signal Monitor (Un015) The allocations are given in the following table. Display Digit Output Pin Numbers Signal Name (Default Setting) Number CN1-31and CN1-32 ALM+ÅCALM- /SO1+ (/COIN+ or /V-CMP+) and /SO1- (/COIN- or CN1-25 and CN1-26 /V-CMP-) CN1-27 and CN1-28 /SO2+ (/TGON+) /SO2- (/TGON-) -
Page 494: Upper Limit Setting Monitor For Maximum Motor Speed/Upper Limit Setting For Encoder Output Resolution (Un010)
13.3 Monitor Display (Un) Operations on the Panel Operator 13.3.5 Upper Limit Setting Monitor for Maximum Motor Speed/Upper Limit Setting for Encoder Output Resolution (Un010) – Reserved. – Reserved. The configuration of the input circuits is shown below. Information OFF: Open ON: Closed Example: SERVOPACK... -
Page 495: Utility Function (Fn) Operations On The Panel Operator
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.1 Display Alarm History (Fn000) 13.4 Utility Function (Fn) Operations on the Panel Operator Utility functions are used to set up and tune the SERVOPACK. The Panel Operator displays numbers beginning with “Fn.” Display Example: Origin Search Analog The operating procedures from the Panel Operator are described here. -
Page 496: Jog (Fn002)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.2 Jog (Fn002) 13.4.2 Jog (Fn002) Refer to the following section for information on this utility function other than the procedure. 7.3 Trial Operation for the Servomotor without a Load on page 7-7 Panel Display after Step Keys... -
Page 497: Jog Program (Fn004)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.4 Jog Program (Fn004) Continued from previous page. Panel Display after Step Keys Operation Operation Press the UP Key to operate the Servomotor in the for- ward direction. Press the DOWN Key to operate the Servomotor in the reverse direction. -
Page 498: Initialize Parameters (Fn005)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.5 Initialize Parameters (Fn005) Panel Display after Step Keys Operation Operation Press the UP Key or DOWN Key according to the initial movement direction of the operation pattern. The operation will start after the preset waiting time. Additional Information •... -
Page 499: Reset Absolute Encoder (Fn008)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.7 Reset Absolute Encoder (Fn008) Panel Display after Step Keys Operation Operation Press the DATA/SHIFT Key for approximately one sec- ond. The display shown at the left will appear. MODE/SET DATA/ Press the MODE/SET Key to clear the alarm history. -
Page 500: Autotune Analog (Speed/Torque) Reference Offset (Fn009)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.8 Autotune Analog (Speed/Torque) Reference Offset (Fn009) 13.4.8 Autotune Analog (Speed/Torque) Reference Offset (Fn009) Refer to the following section for information on this utility function other than the procedure. Automatically Adjusting the Speed Reference Offset on page 6-18 Automatically Adjusting the Torque Reference Offset on page 6-38 Panel Display after Step... -
Page 501: Manually Adjust Torque Reference Offset (Fn00B)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.10 Manually Adjust Torque Reference Offset (Fn00B) Panel Display after Step Keys Operation Operation Press the MODE/SET Key. donE will flash on the display, and then the display shown on the left will MODE/SET DATA/ appear. -
Page 502: Adjust Analog Monitor Output Gain (Fn00D)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.12 Adjust Analog Monitor Output Gain (Fn00D) Panel Display after Step Keys Operation Operation Press the UP Key or DOWN Key to display Fn00C. MODE/SET DATA/ Press the DATA/SHIFT Key for approximately one sec- ond. -
Page 503: Autotune Motor Current Detection Signal Offset (Fn00E)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.13 Autotune Motor Current Detection Signal Offset (Fn00E) Panel Display after Step Keys Operation Operation Press the UP Key or DOWN Key to adjust the gain. MODE/SET DATA/ Press the DATA/SHIFT Key for approximately one sec- ond. -
Page 504: Write Prohibition Setting (Fn010)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.15 Write Prohibition Setting (Fn010) Panel Display after Step Keys Operation Operation Press the DATA/SHIFT Key. The display shown on the left will appear again. MODE/SET DATA/ Next you adjust the offset for phase V (Cu2-o). Press the MODE/SET Key for approximately one second. -
Page 505: Display Servomotor Model (Fn011)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.16 Display Servomotor Model (Fn011) 13.4.16 Display Servomotor Model (Fn011) Refer to the following section for information on this utility function other than the procedure. 9.1 Monitoring Product Information on page 9-2 Panel Display after Step Keys... -
Page 506: Display Software Version (Fn012)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.17 Display Software Version (Fn012) Panel Display after Step Keys Operation Operation • Rotary Servomotors Press the MODE/SET Key. The encoder type and resolution codes will be displayed. Encoder Type Encoder Resolution Type Resolution Incremental... -
Page 507: Multiturn Limit Setting After Multiturn Limit Disagreement Alarm (Fn013)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.18 Multiturn Limit Setting after Multiturn Limit Disagreement Alarm (Fn013) Panel Display after Step Keys Operation Operation Press the MODE/SET Key. The software version of the encoder will be displayed. Additional Information If you press the MODE/SET Key again, a pre-pro- MODE/SET DATA/... -
Page 508: Initialize Vibration Detection Level (Fn01B)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.20 Initialize Vibration Detection Level (Fn01B) Panel Display after Step Keys Operation Operation Press the UP Key or DOWN Key to display Fn014. MODE/SET DATA/ Press the DATA/SHIFT Key for approximately one sec- ond. -
Page 509: Display Servopack And Servomotor Ids (Fn01E)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.21 Display SERVOPACK and Servomotor IDs (Fn01E) 13.4.21 Display SERVOPACK and Servomotor IDs (Fn01E) This function cannot be executed from the Panel Operator on the SERVOPACK. 13.4.22 Display Servomotor ID from Feedback Option Module (Fn01F) This function cannot be executed from the Panel Operator on the SERVOPACK. -
Page 510: Software Reset (Fn030)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.24 Software Reset (Fn030) 13.4.24 Software Reset (Fn030) Refer to the following section for information on this utility function other than the procedure. 6.14 Software Reset on page 6-91 Panel Display after Step Keys Operation... -
Page 511: Advanced Autotuning Without Reference (Fn201)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.27 Advanced Autotuning without Reference (Fn201) Panel Display after Oper- Step Keys Operation ation Press the UP Key or DOWN Key to display Fn200. MODE/SET DATA/ Press the DATA/SHIFT Key for approximately one second. -
Page 512: Adjust Anti-Resonance Control (Fn204)
13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.30 Adjust Anti-resonance Control (Fn204) Panel Display after Step Keys Operation Operation Press the DATA/SHIFT Key for approximately one second. The display shown at the left will appear. MODE/SET DATA/ Press the UP Key or DOWN Key to enter Tuning Mode. - Page 513 13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.32 Easy FFT (Fn206) Panel Display after Step Keys Operation Operation Press the DATA/SHIFT Key for approximately one sec- ond. The display shown on the left will appear and the Panel Operator will enter Reference Amplitude Setting MODE/SET DATA/ (Reference amplitude...
- Page 514 13.4 Utility Function (Fn) Operations on the Panel Operator 13.4.32 Easy FFT (Fn206) Panel Display after Step Keys Operation Operation Press the MODE/SET Key. The optimum notch filter for the detected resonance frequency will automatically be set. If the notch filter is set correctly, donE will flash on the display, and then the display shown on the left will appear.
-
Page 515: Parameter Lists
Parameter Lists This chapter provides information on the parameters. 14.1 List of Parameters ....14-2 14.1.1 Interpreting the Parameter Lists ... . 14-2 14.1.2 List of Parameters . -
Page 516: List Of Parameters
14.1 List of Parameters 14.1.1 Interpreting the Parameter Lists 14.1 List of Parameters 14.1.1 Interpreting the Parameter Lists The types of motors to which the parameter applies. All: The parameter is used for both Rotary Servomotors and Linear Servomotors. Rotary: The parameter is used for only Rotary Servomotors. Linear: The parameter is used for only Linear Servomotors. -
Page 517: List Of Parameters
14.1 List of Parameters 14.1.2 List of Parameters 14.1.2 List of Parameters Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Basic Function Selec- 0000 to After – 0000 Setup – tions 0 10B1 restart Rotation Direction Selection... - Page 518 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to After – 0000 Setup – Selections 1 1142 restart Motor Stopping Method for Servo OFF and Group 1 Alarms Reference...
- Page 519 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to After – 0000 – Setup – Selections 2 4213 restart Applicable...
- Page 520 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to Immedi- page – 0002 Setup Selections 6 105F ately Analog Monitor 1 Signal Selection Motor speed (1 V/1,000 min...
- Page 521 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to Immedi- page – 0000 Setup Selections 7 105F ately Analog Monitor 2 Signal Selection Motor speed (1 V/1,000 min...
- Page 522 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to After – 0010 Tuning – Selections 9 0111 restart ...
- Page 523 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to After – 0000 Setup – Selections B 1121 restart Operator Parameter Display Selection Reference...
- Page 524 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Application Function 0000 to After – – 0000 Setup Selections F 2011 restart Preventative Maintenance Warning Selection ...
- Page 525 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Second Position Loop Immedi- page Pn106 10 to 20,000 0.1/s Tuning Gain ately 8-59 Immedi-...
- Page 526 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Gain Switching Waiting Immedi- page Pn135 0 to 65,535 1 ms Tuning Time 1 ately 8-59...
- Page 527 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Model Following Con- Immedi- Pn143 trol Bias in the Forward 0 to 10,000 0.1% 1000 Tuning...
- Page 528 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Anti-Resonance Damp- Immedi- Pn163 0 to 300 Tuning – ing Gain ately Anti-Resonance Filter -1,000 to Immedi-...
- Page 529 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Position Control Refer- 0000 to After – 0000 Setup – ence For Selections 2236 restart Reference Pulse Form...
- Page 530 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence 1 scale Number of External 4 to pitch/ After page Pn20A 32768 Rotary Setup Encoder Scale Pitches...
- Page 531 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Soft Start Deceleration Immedi- page Pn306 0 to 10,000 1 ms Setup Time ately 6-22...
- Page 532 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Immedi- page Pn406 Emergency Stop Torque 0 to 800 Setup ately 5-33 Speed Limit during Immedi- page...
- Page 533 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Torque-Related Func- 0000 to Immedi- page – 0000 Setup tion Selections 2 1111 ately 8-72...
- Page 534 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Torque Feedforward Immedi- − Pn426 Average Movement 0 to 5,100 0.1 ms Setup ately Time...
- Page 535 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Immedi- page Pn502 Rotation Detection Level 1 to 10,000 Rotary Setup 1 min ately 6-10 Speed Coincidence...
- Page 536 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After – 2100 Setup – FFF2 restart Input Signal Allocation Mode Reference Use the sequence input signal terminals with the default alloca-...
- Page 537 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After − 6543 Setup – FFFF restart N-OT (Reverse Drive Prohibit) Signal Allocation Reference Enable reverse drive when CN1-40 input signal is ON (closed).
- Page 538 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After − 8888 Setup – FFFF restart /SPD-D (Motor Direction) Signal Allocation Reference Active when CN1-40 input signal is ON (closed).
- Page 539 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After – 8888 – Setup – FFFF restart Applicable /ZCLAMP (Zero Clamping Input) Signal Allocation...
- Page 540 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Output Signal Selec- 0000 to After – 3211 Setup – tions 1 6666 restart /COIN (Positioning Completion Output) Signal Allocation...
- Page 541 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence 0000 to Output Signal Selec- After – 0000 Setup – tions 3 0666 restart /NEAR (Near Output) Signal Allocation...
- Page 542 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Output Signal Selec- 0000 to After – 0000 Setup – tions 4 0666 restart ...
- Page 543 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After – 8888 Setup – FFFF restart SEN (Absolute Data Request Input) Signal Allocation Reference Active when CN1-40 input signal is ON (closed).
- Page 544 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Input Signal Selections 0000 to After – 8888 Setup – FFFF restart FSTP (Forced Stop Input) Signal Allocation Enable drive when CN1-40 input signal is ON (closed).
- Page 545 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence page 1 refer- Position Deviation Over- 1 to 524288 Immedi- 8-8, Pn520 ence Setup flow Alarm Level...
- Page 546 14.1 List of Parameters 14.1.2 List of Parameters Continued from previous page. Parameter Setting Setting Default Applicable When Classi- Refer- Name Range Unit Setting Motors Enabled fication ence Program Jogging Accel- Immedi- page Pn534 eration/Deceleration 2 to 10,000 1 ms Setup ately 7-20...
-
Page 547: Parameter Recording Table
14.2 Parameter Recording Table 14.2 Parameter Recording Table Use the following table to record the settings of the parameters. Parameter Default When Name Setting Enabled Pn000 0000 Basic Function Selections 0 After restart Application Function Selec- Pn001 0000 After restart tions 1 Application Function Selec- Pn002... - Page 548 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Position Integral Time Con- Pn11F Immediately stant Pn121 Friction Compensation Gain Immediately Second Friction Compen- Pn122 Immediately sation Gain Friction Compensation Pn123 Immediately Coefficient Friction Compensation Fre- Pn124 Immediately quency Correction...
- Page 549 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Anti-Resonance Filter Time Pn165 Immediately Constant 2 Correction Anti-Resonance Damping Pn166 Immediately Gain 2 Tuning-less Function- Pn170 1401 Related Selections Mode Switching Level for Pn181 Immediately Speed Reference Mode Switching Level for Pn182...
- Page 550 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Pn312 Vibration Detection Level Immediately Pn316 10000 Maximum Motor Speed After restart Moment of Inertia Calcula- Pn324 Immediately tion Starting Level Pn380 Internal Set Speed 1 Immediately Pn381 Internal Set Speed 2...
- Page 551 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Fourth Stage Notch Filter Pn41A 5000 Immediately Frequency Fourth Stage Notch Filter Q Pn41B Immediately Value Fourth Stage Notch Filter Pn41C Immediately Depth Fifth Stage Notch Filter Fre- Pn41D 5000 Immediately...
- Page 552 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Speed Coincidence Detec- Pn503 Immediately tion Signal Output Width Brake Reference-Servo Pn506 Immediately OFF Delay Time Brake Reference Output Pn507 Immediately Speed Level Servo OFF-Brake Com- Pn508 Immediately mand Waiting Time...
- Page 553 14.2 Parameter Recording Table Continued from previous page. Parameter Default When Name Setting Enabled Program Jogging Move- Pn533 Immediately ment Speed Program Jogging Accelera- Pn534 Immediately tion/Deceleration Time Program Jogging Waiting Pn535 Immediately Time Program Jogging Number Pn536 Immediately of Movements Specified Alarm Number for Pn548 0000...
-
Page 554: Appendices
Appendices The appendix provides host controller connection exam- ples, and tables of corresponding SERVOPACK and Sig- maWin+ function names. 15.1 Examples of Connections to Host Controllers . 15-2 15.1.1 Example of Connections to MP2000/MP3000- Series SVA-01 Motion Module ... . . 15-2 15.1.2 Example of Connections to Yokogawa Electric’s F3YP2-0P Positioning Module for Position Control . -
Page 555: Examples Of Connections To Host Controllers
N-OT input Brake interlock output (-) Note: 1. Cables to connect the SERVOPACK to the MP2000/MP3000 are available from Yaskawa. For details, refer to the manual for the Machine Controller. 2. Only signals that are applicable to the MP2000/MP3000-Series SVA-01 Motion Module and the SERVO- PACK are shown in the diagram. - Page 556 15.1 Examples of Connections to Host Controllers 15.1.1 Example of Connections to MP2000/MP3000-Series SVA-01 Motion Module 9. The SERVOPACK provides safety functions to protect people from the hazardous operation of the moving parts of the machine. In order to use the safety functions, the required circuits must be configured for CN8. If the safety functions will not be used, leave the enclosed Safety Jumper Connector connected to the SERVOPACK (CN8).
-
Page 557: Example Of Connections To Yokogawa Electric's F3Yp2-0P Positioning Module For Position Control
15.1 Examples of Connections to Host Controllers 15.1.2 Example of Connections to Yokogawa Electric’s F3YP2-0P Positioning Module for Position Control 15.1.2 Example of Connections to Yokogawa Electric’s F3YP2-0P Positioning Module for Position Control Yokogawa Electric’s F3YP22-0P, SERVOPACK F3YP24-0P, or F3YP28-0P Positioning Module PULS (CW) Pulse output A ... -
Page 558: Example Of Connections To Yokogawa Electric's F3Nc3-0N Positioning Module For Position Control
15.1 Examples of Connections to Host Controllers 15.1.3 Example of Connections to Yokogawa Electric’s F3NC3-0N Positioning Module for Position Control 15.1.3 Example of Connections to Yokogawa Electric’s F3NC3-0N Positioning Module for Position Control Yokogawa Electric Positioning Module SERVOPACK F3NC32-0N or F3NC34-0N PULS (CW) Pulse output A ... -
Page 559: Example Of Connections To An Omron Position Control Unit
15.1 Examples of Connections to Host Controllers 15.1.4 Example of Connections to an OMRON Position Control Unit 15.1.4 Example of Connections to an OMRON Position Control Unit I/O power supply OMRON Position Control Unit S_Analog CS1W-NC133, CS1W-NC233, +24 V SERVOPACK or CS1W-NC433 5-V power supply for pulse output 5-V GND for pulse output... -
Page 560: Example Of Connection To Mitsubishi's Qd75D Positioning Module For Position Control
15.1 Examples of Connections to Host Controllers 15.1.5 Example of Connection to Mitsubishi’s QD75D Positioning Module for Position Control 15.1.5 Example of Connection to Mitsubishi’s QD75D Posi- tioning Module for Position Control Mitsubishi Electric’s QD75D SERVOPACK ON when proximity is detected ON when positioning STOP is cancelled... -
Page 561: Corresponding Servopack And Sigmawin+ Function Names
15.2 Corresponding SERVOPACK and SigmaWin+ Function Names 15.2.1 Corresponding SERVOPACK Utility Function Names 15.2 Corresponding SERVOPACK and SigmaWin+ Function Names This section gives the names and numbers of the utility functions and monitor display functions used by the SERVOPACKs and the names used by the SigmaWin+. 15.2.1 Corresponding SERVOPACK Utility Function Names SigmaWin+ SERVOPACK... -
Page 562: Corresponding Servopack Monitor Display Function Names
15.2 Corresponding SERVOPACK and SigmaWin+ Function Names 15.2.2 Corresponding SERVOPACK Monitor Display Function Names 15.2.2 Corresponding SERVOPACK Monitor Display Function Names SigmaWin+ SERVOPACK Menu Bar Name [Unit] Un No. Name [Unit] Button Un000 Motor Speed [min Motor Speed [min Un001 Speed Reference [min Speed Reference [min Torque Reference [%]... - Page 563 15.2 Corresponding SERVOPACK and SigmaWin+ Function Names 15.2.2 Corresponding SERVOPACK Monitor Display Function Names SigmaWin+ SERVOPACK Menu Bar Name [Unit] Un No. Name [Unit] Button Input Reference Pulse Counter [ref- Un00C Input Reference Pulse Counter [reference units] erence units] Feedback Pulse Counter [encoder Un00D Feedback Pulse Counter [encoder pulses] pulses]...
- Page 564 15.2 Corresponding SERVOPACK and SigmaWin+ Function Names 15.2.2 Corresponding SERVOPACK Monitor Display Function Names Select which signal to monitor with Pn080 = n.X (Calculation Method for Maximum Speed or Divided Out- put Pulses). • If Pn080 = n.0, the encoder output resolution (Pn281) that can be set is displayed. •...
- Page 565 Index Index - - - - - - - - - - - - - - - - - - - - - - 12-5 alarm code output - - - - - - - - - - - - - - - - - - - - 12-5 alarm reset possibility - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -6-8 - - - - - - - - - - - - - - - - - - -6-8...
- Page 566 Index DC Reactor - - - - - - - - - - - 11-6 HWBB input signal specifications - - - - - - - - - - - - - - - - - - - - - - - - -4-11 terminals HWBB state - - - - - - - - - - - - - - - - - - - - - - - - - - -4-18...
- Page 567 Index - - - - - - - - - - - - - - - - - - - 5-18 - - - - - - - - - - - - - - - 8-65 motor direction setting proportional control (P control) - - - - - - - - - - - - - - - - - - 6-15 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4-28...
- Page 568 Index setting the position deviation overflow alarm level - - - - - - - - - - - - - - - - - - - - - 8-77 torque feedforward - - - - - - - - - - - - - - - - - - - - - - - - - -8-10 at servo ON torque reference - - - - - - - - - - - - - - - - - - - - - - - - - 6-42...
- Page 569 Revision History The revision dates and numbers of the revised manuals are given on the bottom of the back cover. MANUAL NO. SIEP S800001 26B S_Analog Published in Japan May 2014 14-4 Date of Rev. No. publication Date of original publication Rev.
- Page 570 Phone 81-4-2962-5151 Fax 81-4-2962-6138 http://www.yaskawa.co.jp YASKAWA AMERICA, INC. 2121 Norman Drive South, Waukegan, IL 60085, U.S.A. Phone 1-800-YASKAWA (927-5292) or 1-847-887-7000 Fax 1-847-887-7310 http://www.yaskawa.com YASKAWA ELÉTRICO DO BRASIL LTDA. Avenida Piraporinha 777, Diadema, São Paulo, 09950-000, Brasil Phone 55-11-3585-1100 Fax 55-11-3585-1187 http://www.yaskawa.com.br...
Need help?
Do you have a question about the E-7-Series SGD7S and is the answer not in the manual?
Questions and answers