Siemens Sinamics G110M Operating Instructions Manual
Sinamics series distributed converter for simogear geared motors
Hide thumbs
Also See for Sinamics G110M:
- Operating instructions manual (428 pages) ,
- Original instructions manual (344 pages) ,
- Function manual (244 pages)
Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Related Manuals for Siemens Sinamics G110M












Summary of Contents for Siemens Sinamics G110M
- Page 3 ___________________ Changes in this manual Fundamental safety ___________________ instructions ___________________ SINAMICS Introduction ___________________ Description SINAMICS G110M Distributed converter for ___________________ SIMOGEAR geared motors Installation ___________________ Commissioning Operating Instructions ___________________ Advanced commissioning ___________________ Data backup and series commissioning ___________________ Alarms, faults and system...
-
Page 4: Legal Information
Note the following: WARNING Siemens products may only be used for the applications described in the catalog and in the relevant technical documentation. If products and components from other manufacturers are used, these must be recommended or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and maintenance are required to ensure that the products operate safely and without any problems. -
Page 5: Changes In This Manual
Changes in this manual Essential changes with respect to Edition 07/2016 New functions ● Improved efficiency optimization of induction motors Efficiency optimization (Page 275) ● The converter reports a warning if no memory card is plugged. Activate message for a memory card that is not inserted (Page 291) Overview of all the new and changed functions in the V4.7 SP9 firmware: Firmware version 4.7 SP9 (Page 347) Corrections... - Page 6 Changes in this manual ● Sorting of the inverter functions changed, new "Energy saving" and "Availability" categories Overview of converter functions (Page 139) ● LED symbols added, tables revised Status LED overview (Page 303) ● Descriptions shortened and graphics simplified Alarms, alarm buffer, and alarm history (Page 308) Faults, alarm buffer and alarm history (Page 311) ●...
-
Page 7: Table Of Contents
About the Manual ........................23 Description ............................27 Identifying the components of the system ................27 SINAMICS G110M converter ....................29 General layout SINAMICS G110M system ................33 Directives and standards ......................38 Installation ............................41 Mechanical Installation......................42 System Installation ........................46 4.2.1... - Page 8 Table of contents 4.4.2.4 Installing GSDML ........................93 4.4.3 PROFIBUS ..........................94 4.4.3.1 What do you need for communication via PROFIBUS? ............94 4.4.3.2 Integrating the inverter in PROFIBUS ..................94 4.4.3.3 Configuring the communication using SIMATIC S7 control ........... 95 4.4.3.4 Installing the GSD ........................
- Page 9 Table of contents 6.4.9 Slave-to-slave communication ....................165 Control via AS-i ........................165 6.5.1 Single slave mode ......................... 165 6.5.2 Dual slave mode ........................167 6.5.3 Assignment tables ......................... 170 6.5.4 Cyclic and acyclic communication via CTT2 ................ 172 6.5.5 Cyclic communication ......................
- Page 10 Table of contents 6.15.5 Speed limitation........................223 6.15.6 Ramp-function generator ..................... 223 6.16 PID technology controller ..................... 228 6.16.1 Overview ..........................228 6.16.2 Setting the controller ......................229 6.16.3 Optimizing the controller ...................... 232 6.17 Motor control ........................233 6.17.1 V/f control ..........................
- Page 11 Performance ratings of the Control Module - CU240M ............339 10.2 Performance ratings Power Module - PM240M ..............340 10.3 SINAMICS G110M specifications ..................341 10.4 Ambient operating temperature .................... 343 10.5 Current derating - depending on the installation altitude ............344 10.6...
- Page 12 Table of contents Acceptance tests for the safety functions ................363 A.4.1 Recommended acceptance test ..................363 A.4.2 Acceptance test STO (basic functions) ................364 A.4.3 Machine documentation ....................... 366 A.4.4 Documenting the settings for the basic functions, firmware V4.4 ... V4.7 SP6 ....368 Electromagnetic Compatibility ....................
-
Page 13: Fundamental Safety Instructions
Fundamental safety instructions General safety instructions WARNING Electric shock and danger to life due to other energy sources Touching live components can result in death or severe injury. • Only work on electrical devices when you are qualified for this job. •... - Page 14 Fundamental safety instructions 1.1 General safety instructions WARNING Electric shock due to equipment damage Improper handling may cause damage to equipment. For damaged devices, hazardous voltages can be present at the enclosure or at exposed components; if touched, this can result in death or severe injury.
- Page 15 • If you come closer than around 2 m to such components, switch off any radios or mobile phones. • Use the "SIEMENS Industry Online Support App" only on equipment that has already been switched off. Distributed converter for SIMOGEAR geared motors...
- Page 16 Fundamental safety instructions 1.1 General safety instructions WARNING Motor fire in the event of insulation overload There is higher stress on the motor insulation through a ground fault in an IT system. If the insulation fails, it is possible that death or severe injury can occur as a result of smoke and fire.
- Page 17 Fundamental safety instructions 1.1 General safety instructions WARNING Unexpected movement of machines caused by inactive safety functions Inactive or non-adapted safety functions can trigger unexpected machine movements that may result in serious injury or death. • Observe the information in the appropriate product documentation before commissioning.
-
Page 18: Equipment Damage Due To Electric Fields Or Electrostatic Discharge
Fundamental safety instructions 1.2 Equipment damage due to electric fields or electrostatic discharge Equipment damage due to electric fields or electrostatic discharge Electrostatic sensitive devices (ESD) are individual components, integrated circuits, modules or devices that may be damaged by either electric fields or electrostatic discharge. NOTICE Equipment damage due to electric fields or electrostatic discharge Electric fields or electrostatic discharge can cause malfunctions through damaged... -
Page 19: Industrial Security
Siemens’ products and solutions undergo continuous development to make them more secure. Siemens strongly recommends to apply product updates as soon as available and to always use the latest product versions. Use of product versions that are no longer supported, and failure to apply latest updates may increase customer’s exposure to cyber threats. -
Page 20: Residual Risks Of Power Drive Systems
Fundamental safety instructions 1.5 Residual risks of power drive systems Residual risks of power drive systems When assessing the machine- or system-related risk in accordance with the respective local regulations (e.g., EC Machinery Directive), the machine manufacturer or system installer must take into account the following residual risks emanating from the control and drive components of a drive system: 1. - Page 21 Fundamental safety instructions 1.5 Residual risks of power drive systems For more information about the residual risks of the drive system components, see the relevant sections in the technical user documentation. Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 22 Fundamental safety instructions 1.5 Residual risks of power drive systems Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 23: Introduction
Introduction About the Manual Who requires the operating instructions and what for? These operating instructions primarily address fitters, commissioning engineers and machine operators. The operating instructions describe the devices and device components and enable the target groups being addressed to install, connect-up, set, and commission the converters safely and in the correct manner. - Page 24 Introduction 2.1 About the Manual Section In this section you will find answers to the following questions: How is the inverter marked? • Description (Page 27) Which components make up the inverter? • Which optional components are available for the inverter? •...
- Page 25 Introduction 2.1 About the Manual Section In this section you will find answers to the following questions: What is the inverter technical data? • Technical data (Page 339) What do "High Overload" and "Low Overload" mean? • What are the new functions of the current firmware? •...
- Page 26 Introduction 2.1 About the Manual Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 27: Description
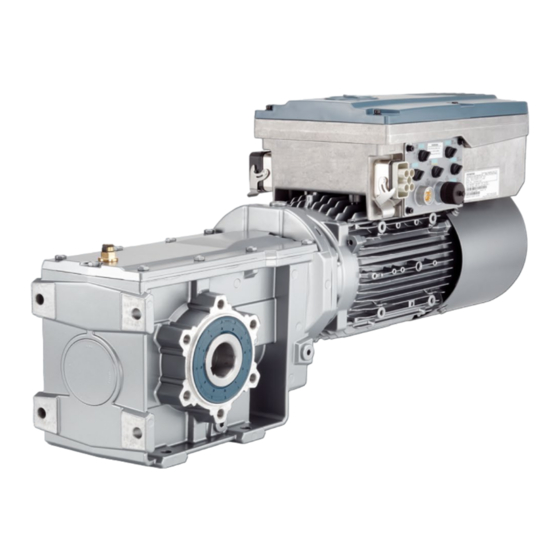
OpenSSL (https://www.openssl.org/) Cryptsoft (mailto:eay@cryptsoft.com) Identifying the components of the system The SINAMICS G110M is a complete converter system for controlling the speed of a three- phase motor. Each part of the system is shown in the following figure. Distributed converter for SIMOGEAR geared motors... - Page 28 Description 3.1 Identifying the components of the system Figure 3-1 Identifying the components of the system Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 29: Sinamics G110M Converter
Description 3.2 SINAMICS G110M converter SINAMICS G110M converter Overview The SINAMICS G110M system consists of the following components: Terminal Hous- The TH acts as the connection between the G110M and ing (TH) the motor. The TH replaces the normal motor terminal box. - Page 30 Description 3.2 SINAMICS G110M converter The Power Modules are designed for a specific power range and the Terminal Housings are designed to work with specific motors. The Terminal Housing not only allows the direct mounting onto a motor but specific cable glands and mains connectors are specified. All the various combinations of Power Modules, Terminal Housings (including the Control Modules) and Options are given in the tables below.
- Page 31 FS100/112 HanQ 4/2 / 7/8" 6SL3544-0QB02-1MA0 Every SINAMICS G110M is delivered with the following accessories: All variants ● PTC connection cable - this is the extension cable used to connect the PTC wires from the motor to the connection on the CPI board.
- Page 32 Compatible motors for the SINAMICS G110M system The SINAMICS G110M is designed for mounting on SIMOGEAR geared motors. It is compatible with motors from frame size 71 to frame size 112. For an overview of which motors can be operated with SINAMICS G110M in combination with SIMOGEAR, please read FAQ 1097385577 at the following link: FAQ 1097385577 (https://support.industry.siemens.com/cs/us/en/view/109738577)
-
Page 33: General Layout Sinamics G110M System
Description 3.3 General layout SINAMICS G110M system General layout SINAMICS G110M system Introduction The locations and description of the various interface connections of the CU240M Terminal housing (including the Control Module (CM)) and the PM240M Power Module (PM) are detailed in the figure and table below. - Page 34 Description 3.3 General layout SINAMICS G110M system Figure 3-2 General layout of the system - all variants except CU240M AS-i Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 35 Description 3.3 General layout SINAMICS G110M system Table 3- 4 Description and location of interfaces Item Description Item Description Power Module Blanking plate - to seal the opposite side of the Terminal Housing from which the CPI has been fitted.
- Page 36 Description 3.3 General layout SINAMICS G110M system Figure 3-3 SINAMICS G110M ASi General Layout Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 37 Description 3.3 General layout SINAMICS G110M system Table 3- 5 Description and location of interfaces Description Description Status LEDs AS-i connection and Aux power Optical I/O connection Digital inputs 0 and 1 Potentiometer Mains supply connection Mini USB connection Braking resistor & motor connection terminals Card reader (on underside of Power Communications &...
-
Page 38: Directives And Standards
Description 3.4 Directives and standards Directives and standards Relevant directives and standards The following directives and standards are relevant for the inverters: European Low Voltage Directive The inverters fulfil the requirements stipulated in the Low-Voltage Directive 2014/35/EU, if they are covered by the application area of this directive. European Machinery Directive The inverters fulfil the requirements stipulated in the Machinery Directive 2006/42//EU, if they are covered by the application area of this directive. - Page 39 Immunity to voltage drop of semiconductor process equipment. The inverters comply with the requirements of standard SEMI F47-0706. Quality systems Siemens AG employs a quality management system that meets the requirements of ISO 9001 and ISO 14001. Certificates for download ●...
- Page 40 Description 3.4 Directives and standards Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 41: Installation
Installation DANGER Operation with ungrounded (IT) mains supplies can produce extremely dangerous conditions The converter must always be grounded. If the converter is not grounded correctly, extremely dangerous conditions may arise within the inverter which could prove potentially fatal. The converter can only be used on TT and TN mains supplies. DANGER Risk of burns and fire due to high temperatures During operation and for a short time after switching the converter off, the surfaces reach... -
Page 42: Mechanical Installation
Installation 4.1 Mechanical Installation Mechanical Installation Dimensions of the system The converter has two frame sizes. Frame size A (FSA) and Frame size B (FSB), the dimensions of each frame size is given in the figure and table below. Figure 4-1 Dimensions of the converter Table 4- 1 Converter dimensions... - Page 43 Installation 4.1 Mechanical Installation Terminal Housing dimensions and fixing points The Terminal Housing of the G110M system replaces the existing terminal box on the connected motor. There are three different types of the Terminal Housings and they are shown in the following figure. All three Terminal Housings have the same external dimensions: ●...
- Page 44 To ensure that the correct motor is selected the following sources of information should be consulted: ● The relevant system catalog, for example the SINAMICS G120 catalog. ● The relevant motor catalog. ● The Siemens "Configurator" online software application for dimensioning motors (Siemens motor configurator (https://eb.automation.siemens.com/goos/catalog/Pages/ProductData.aspx?catalogRegio n=WW&language=en&nodeid=10028832&tree=CatalogTree®ionUrl=%2F&autoopen= false&activetab=product#topAnch&activetab=config&))
- Page 45 Installation 4.1 Mechanical Installation Figure 4-4 Example of the data available from the Sizer program Mounting orientation The G110M system has been designed to operate in any orientation depending on the motor mounting configuration. Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 46: System Installation
It is also possible that the SINAMICS G110M system is delivered as separate components, which will require the system to be fitted together before installation and commissioning can take place. - Page 47 Installation 4.2 System Installation DANGER Risk of electrical shock When the converter and motor are powered-up, high voltages are present in the electrical components of the system, any contact with these components could result in severe personal injury or death. During the installation procedure, the mains supply and external power sources should not be applied to the system.
- Page 48 4.2 System Installation Note Use only Non-Drive End (NDE) motor configurations The SINAMICS G110M has been designed to be used in conjunction with NDE motors. Do not use standard motor terminal box mountings with the SINAMICS G110M systems. Disassembly procedure When the SINAMICS G110M is delivered as separate components, the Terminal Housing must be fitted to the motor.
- Page 49 Installation 4.2 System Installation 3. Remove the Control Module 1. Unscrew the four self-retaining screws that secure the Control Module in place. 2. Carefully lift the Control Module out of the Terminal Housing. Note: The screws that secure the Control Module in place are self- retaining screws and cannot be fully removed from the Control Module casing.
- Page 50 Installation 4.2 System Installation Installation procedure Having dismantled the SINAMICS G110M Terminal Housing, the following procedure should be performed to complete the installation of the whole system. 1. Star and Delta Configuration Configure the motor terminals for either star or delta configura- tion depending upon the voltage requirement of the application and the mains input voltage.
- Page 51 LA/LE motors for mounting on SIMOGEAR gearboxes (http://support.automation.siemens.com/WW/view/en/60666 508). • If the SINAMICS G110M is ordered as a complete system, then all mechanical and electrical installation is completed in the factory prior to delivery. Distributed converter for SIMOGEAR geared motors...
- Page 52 Installation 4.2 System Installation 4. Connect the motor earth cable to the Terminal Housing 1. Feed the motor earth cable through the Terminal Housing. 2. Secure the motor earth cable to the Terminal Housing earthing post (1.5 Nm). 5. Connect the Terminal Housing motor terminals to the motor 1.
- Page 53 Terminal Housing. 2. Tighten the earthing post screw to 1.5 Nm. Note: If the SINAMICS G110M is ordered as a complete system, then all mechanical and electrical installation is completed in the factory prior to delivery. Distributed converter for SIMOGEAR geared motors...
- Page 54 Installation 4.2 System Installation 9. Connecting the mains cables (HANQ variant) 1. Ensure that the cable clamp has been removed. 2. Connect the HANQ L1, L2 and L3 connections to the L1, L2 and L3 connections on the mains connector. 3.
- Page 55 Installation 4.2 System Installation 11. Connecting the power-through cables (Glanded variant) In the glanded variant the power-through connections use a different methodology. The Terminal Housing terminals L1, L2 and L3 require two cables to be fitted to each terminal - this makes the maximum cable cross-section 2.5 mm .
- Page 56 Installation 4.2 System Installation 13. Fitting the blanking plate 1. Using the four screws, fit the blank plate to the side of the Terminal Housing. 2. Ensure that no cables or components are trapped between the blanking plate and the Terminal Housing seal, as this would adversely affect the IP rating of the Terminal Housing.
- Page 57 Installation 4.2 System Installation 16. Final connection and adjustments 1. Connect the temperature sensor connector into the connector at the top edge of the CPI. 2. Connect the small communications connector into the connector at the top of the CPI. 3.
- Page 58 For a complete explanation of the unswitched and switched 24 V supplies and their limitations, please read the FAQ at the following link: Unswitched and switched 24 V supply (http://support.automation.siemens.com/WW/view/en/26986267) After the system installation has been completed, the external electrical connections can be performed.
-
Page 59: Installing The 24V Power Supply
Installation 4.2 System Installation Grounding the Terminal Housing To ensure that the Inverter is properly grounded and protected, an earthing cable MUST be fitted to the Terminal Housing of the G110M system. ● Connect the PE terminal on the left-hand side of the inverter to appropriate grounding point of the installation. - Page 60 Installation 4.2 System Installation The optional 24 V PSU can be ordered using the following article number: 6SL3555-0PV00-0AA0 A brief description of the layout and the connections of the 24 V PSU are given in the following figure. Figure 4-6 24V PSU Layout Restrictions DANGER...
- Page 61 Installation 4.2 System Installation ● When using the 24 V PSU there is no longer any isolation between the 24 V PSU and the digital outputs of the system. ● Since the 24 V PSU utilizes the DC link voltage to provide the 24 V supply to the Control Module, when the mains supply is disconnected, all power will be lost to the Control Module.
- Page 62 Installation 4.2 System Installation Using the external power supply with the G110M AS-i variant The 24 V power supply for the G110M AS-i variant is typically provided by the yellow and black AS-i cables that create the AS-i network. The yellow cable is the communications cable but also provides the power to: ●...
-
Page 63: Electrical Installation
Installation 4.3 Electrical Installation Electrical Installation 4.3.1 SINAMICS G110M Electrical data Power Module specifications - 3AC 380 V (-10%) ... 480 V (+10%) Table 4- 2 Rated Output, Input and Fuses Product Frame size Rated output Fuse* Rated output Rated input 3NA3…... - Page 64 * The optional 24 V PSU is an orderable item which is designed specifically for use with the SINAMICS G110M converter. The 24 V PSU is fitted to the terminal housing as shown in stalling the 24V power supply (Page 59). The external 24 V supply is sourced by the user and is...
- Page 65 CAUTION Thermal stability of the system The SINAMICS G110M system is comprised of a motor and a converter which are designed to work together. The system can generate a significant amount of heat which can affect the performance of your application.
-
Page 66: Emc Installation Guidelines
Installation 4.3 Electrical Installation 4.3.2 EMC installation guidelines 4.3.2.1 Connections and interference suppression All connections should be made so that they are permanent. Screwed connections on painted or anodized metal components must be made either by means of special contact washers, which penetrate the isolating surface and establish a metallically conductive contact, or by removing the isolating surface on the contact points. -
Page 67: Equipotential Bonding
Grounding and high-frequency equipotential bonding measures The following figure illustrates all grounding and high-frequency equipotential bonding measures using an example with the SINAMICS G110M. Figure 4-9 Grounding and high-frequency equipotential bonding measures in the drive system and... - Page 68 Installation 4.3 Electrical Installation ① The ground connections represent the conventional grounding system for the drive components. They are made with standard, heavy-power PE conductors without special high-frequency properties and ensure low frequency equipotential bonding as well as protection against injury. The line supply cable of the converter can be unshielded.
-
Page 69: Protective Conductor
Installation 4.3 Electrical Installation 4.3.3 Protective conductor WARNING Danger to life caused by high leakage currents for an interrupted protective conductor The drive components conduct a high leakage current via the protective conductor. Touching conductive parts when the protective conductor is interrupted can result in death or serious injury. -
Page 70: Connection And Cables
Installation 4.3 Electrical Installation (Cables routed inside electrical cabinets or enclosed machine housings are considered to be adequately protected against mechanical damage.) – As a conductor of a multi-conductor cable, the protective conductor has a cross- section ≥ 2.5 mm² Cu. –... - Page 71 Installation 4.3 Electrical Installation In some cases, it is possible to extend the cable length by the use of appropriate repeaters. The maximum cable lengths for the various communications protocols are given in the following table: Table 4- 5 Maximum cable lengths for USS, PROFIBUS, PROFINET and AS-i Communications protocol Transfer rate or cable type Maximum overall length of cable...
- Page 72 Installation 4.3 Electrical Installation Outline block diagram Figure 4-11 Outline block diagram SINAMICS CU240M and PM240M Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 73 Cable, connectors and tools specifications The detailed specifications for the cables, connectors and tools required to manufacture the necessary cables for the SINAMICS G110M are listed in the following documents and can be accessed using the relevant links: SINAMICS and motors for Single-Axis Drives D31 catalog (https://w3app.siemens.com/mcms/infocenter/content/en/Pages/order_form.aspx?nodeKey=...
- Page 74 Installation 4.3 Electrical Installation Siemens supplementary product information (http://support.automation.siemens.com/WW/view/en/65355810) The connections that are detailed in this section relate to the physical connections that exist on the converter. Note NFPA compatibility These devices are intended only for installation on industrial machines in accordance with the "Electrical Standard for Industrial Machinery"...
- Page 75 Installation 4.3 Electrical Installation USS terminal diagram M12 connector, 5 Pole, male M12 connector, 5 Pole, female PROFIBUS terminal diagram M12 connector, 5 Pole, male M12 connector, 5 Pole, female PROFINET terminal diagram M12 connector, 4 Pole, male M12 connector, 4 Pole, female AS-i terminal diagram M12 connector, 5 Pole, female Distributed converter for SIMOGEAR geared motors...
- Page 76 Installation 4.3 Electrical Installation 24V Power supply - USS, PROFIBUS, PROFINET The unswitched 24 V power supply (1L+) is required for the device to function. ● Use a power supply with PELV (Protective Extra Low Voltage). ● For applications in USA and Canada: Use a power supply NEC Class 2. ●...
- Page 77 Installation 4.3 Electrical Installation I/O terminal diagram - all varaints The maximum combined current for all digital inputs is 200 mA and the maximum combined current for all digital outputs is 500 mA. M12 connector, 5 Pole, female Specification: PNP, SIMATIC-compatible, low <5 V, high >...
-
Page 78: Connecting The Motor To The Inverter In A Star Or Delta Connection
Installation 4.3 Electrical Installation Figure 4-13 Control Unit motor and power connections 4.3.5 Connecting the motor to the inverter in a star or delta connection Standard induction motors with a rated power of approximately ≤ 3 kW are normally connected in a star/delta connection (Y/Δ) at 400 V/230 V. For a 400-V line supply, you can connect the motor to the inverter either in a star or in a delta connection. -
Page 79: Cable Protection
Installation 4.3 Electrical Installation Operating the motor in a delta connection with 87 Hz characteristic In a delta connection, the motor is oper- ated with a voltage and frequency above its rated values. As a consequence, the motor power is increased by a factor √3 ≈... - Page 80 Installation using power-through daisy chain The SINAMICS G110M system has been designed to allow a converter to utilize power- through to provide the mains power for a number of converters in a daisy chain. The maximum current limits for the daisy chain are given below: ●...
-
Page 81: Connecting The Profinet Interface
Installation 4.3 Electrical Installation Connecting the motor holding brake The Motor Holding Brake (MHB) function of the Control Units comprise dedicated hardware and software to control the actions of the MHB on the motor which is connected to the Inverter. The MHB is connected to the Inverter using the EMB- and EMB+ terminals of the mains connectors in the Control Unit housing. -
Page 82: Terminal Assignment Dependent On Interface Configuration
Installation 4.3 Electrical Installation Cable screening The screen of the PROFINET cable must be connected with the protective earth. The solid copper core must not be scored when the insulation is removed from the core ends. 4.3.8 Terminal assignment dependent on interface configuration The inputs and outputs of the frequency inverter and the fieldbus interface have specific functions when set to the factory settings. - Page 83 Installation 4.3 Electrical Installation Figure 4-16 Macro 29 - Conveyer with potentiometer and fixed setpoint (Default USS) Figure 4-17 Macro 7 - Switch over between fieldbus and jogging using DI 3 (default DP/PN) Figure 4-18 Macro 30 - ASi Single slave with fixed setpoints (default ASi) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 84 For a complete explanation of the unswitched and switched 24 V supplies and their limitations, please read the FAQ at the following link: Unswitched and switched 24 V supply (http://support.automation.siemens.com/WW/view/en/26986267) Macros for the CU240M The macros that are available for the CU240M Control Modules are shown in the figures below.
- Page 85 Installation 4.3 Electrical Installation Figure 4-21 Macro 12 - Two-wire control with method 1 Figure 4-22 Macro 17 - Two-wire control with method 2 Figure 4-23 Macro 18 - Two-wire control with method 3 Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 86 Installation 4.3 Electrical Installation Figure 4-24 Macro 19 - Three-wire control with method 1 Figure 4-25 Macro 20 - Three-wire control with method 2 Figure 4-26 Macro 21 - Fieldbus USS Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 87 Installation 4.3 Electrical Installation Figure 4-27 Macro 28 - Conveyor with 2 fixed setpoints Figure 4-28 Macro 29 - Conveyer with potentiometer and fixed setpoint (default USS) Figure 4-29 Macro 30 - ASi Single slave with fixed setpoints (default ASi) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 88 Installation 4.3 Electrical Installation Figure 4-30 Macro 31 - ASi Dual slave with fixed setpoints Figure 4-31 Macro 32 - ASi Single slave with analog setpoint Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 89 Installation 4.3 Electrical Installation Figure 4-32 Macro 33 - 4DI decentral conveyor with fieldbus Figure 4-33 Macro 34 - ASi Dual slave with setpoint Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 90: Connecting The Inverter To The Fieldbus
Installation 4.4 Connecting the inverter to the fieldbus Connecting the inverter to the fieldbus 4.4.1 Fieldbus version of the Control Module Fieldbus interfaces of the Control Modules There are different versions of the Control Modules for communication with a higher-level control system: Fieldbus Profile... - Page 91 Installation 4.4 Connecting the inverter to the fieldbus The inverter as Ethernet node Figure 4-34 The inverter as Ethernet node The inverter in PROFINET IO operation Figure 4-35 The inverter in PROFINET IO operation In PROFINET IO operation, the inverter supports the following functions: ●...
-
Page 92: What Do You Need For Communication Via Profinet
4.4 Connecting the inverter to the fieldbus General information about PROFINET You can find general information about PROFINET in the Internet: ● General information about PROFINET: Industrial Communication (http://support.automation.siemens.com/WW/view/en/19292127). ● Configuring the functions: PROFINET system description (http://www.automation.siemens.com/mcms/automation/en/industrial- communications/profinet/Pages/Default.aspx). This manual describes the control of the inverter using primary control. Accessing the inverter as an Ethernet node is described in the "Fieldbus"... -
Page 93: Configuring Communication To The Control
● Install the GSDML of the inverter using “Tools/Install GSDML file" in HW Config. Further information is provided in the Fieldbus function manual. Manuals for your converter (Page 372) Configuring the communication with a non-Siemens control 1. Import the device file (GSDML) of the inverter into the engineering tool for your control system. -
Page 94: Profibus
PROFIBUS cables and the two PROFIBUS jacks X03 and X04. If your inverter forms the end of the line, only use jack X03 and connect the bus-terminating resistor. General layout SINAMICS G110M system (Page 33) The maximum permitted cable length to the previous station and the subsequent one is 100 m at a baud rate of 1 Mbit/s. -
Page 95: Configuring The Communication Using Simatic S7 Control
Valid address range: 1 … 125 General layout SINAMICS G110M system (Page 33) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH... -
Page 96: Communications Via As-I
Installation 4.4 Connecting the inverter to the fieldbus Procedure To change the bus address, proceed as follows: 1. Set the address using one of the subsequently listed options: – using the address switch – from an operator panel using parameter p0918 –... -
Page 97: Setting The Address
Details about the default settings are provided in the operating instructions of your inverter. Inverter factory setting (Page 108) Connection The following table shows the AS-i plug assignment. Further connection information is contained in the AS-Interface system manual. AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856) Table 4- 8 Pin assignment X03 AS-i (M12) Function Description... - Page 98 Further information is contained in the AS-Interface system manual, Section "Setting the AS-i address" AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856) Addressing via the addressing device (e.g. 3RK1904-2AB02) Addressing via the addressing device is made offline. Further information is contained in the AS-Interface system manual, Section "Setting the AS-i address"...
-
Page 99: Using The As-I Programmer
Installation 4.4 Connecting the inverter to the fieldbus Addressing via parameters The address assignment is made with the p2012[0] and p2012[1] parameters. If you assign the address via STARTER, you must save the settings via (RAM -> ROM). ● Address range for Single Slave inverter, profile 7.F.E –... - Page 100 Installation 4.4 Connecting the inverter to the fieldbus Setting the AS-i address of slave 1 Plug the AS-i Programmer into the addressing socket of the Inverter. Turn the dial on the Programmer to the ADDR position. The display will indicate that this mode has been selected. Press the button;...
- Page 101 Installation 4.4 Connecting the inverter to the fieldbus Modifying an existing address of a single slave within the Inverter will not affect the address of the other slave. To change an existing address of a slave, the following procedure should be performed: Plug the AS-i Programmer into the addressing socket of the Inverter Turn the dial on the Programmer to the ADDR position.
- Page 102 Installation 4.4 Connecting the inverter to the fieldbus Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 103: Commissioning
Commissioning Commissioning guidelines We recommend the following procedure: 1. Define the requirements of your application placed on the drive. → (Page 105) . 2. Reset the converter when required to the factory setting. → (Page 113) . 3. Check whether the factory setting of the converter is appropriate for your application. -
Page 104: Commissioning Tools
Commissioning 5.2 Commissioning tools Commissioning tools Figure 5-1 Commissioning tools - PC or IOP Handheld Kit Table 5- 1 Components and tools for commissioning and data backup Component or tool Article number Operator Panel IOP-2 Handheld Kit 6SL3255-0AA00-4HA1 Optical cable Required for using IOP Handheld Kit with 3RK1922-2BP00 CU240M... -
Page 105: Prepare Commissioning
The default settings for the motor data assumes you are using a Siemens standard 4-pole motor. If you are not using a Siemens standard 4-pole motor with a motor which has the same rating as the converter, for example, a 1.5 kW converter and a 1.5 kW motor, then your application will not work correctly after a factory reset. -
Page 106: Collecting Motor Data
5.3.1 Collecting motor data The SINAMICS G110M system is generally delivered as a completely assembled, Inverter, Power Module and motor, but it may be necessary to input specific motor data depending on the requirements of the users application. All the necessary motor data is displayed on the motor rating label as shown in the following example. - Page 107 Commissioning 5.3 Prepare commissioning Matrix code Applied standard Serial No. FDU = Siemens AG, Bahnhofstr. 40, 72072 Tübingen, Germany CE marking or other marking, if required Article No. Model - Type - Size Mounting position Degree of protection according to IEC 60034-5 or IEC 60529...
-
Page 108: Inverter Factory Setting
[rpm] 44 Motor designation, active part ● If you use the STARTER commissioning tool and a SIEMENS motor, you only need to specify the article number of the motor, otherwise you must note the data from the motor rating label. -
Page 109: V/F Control Or Speed Control
Commissioning 5.3 Prepare commissioning Figure 5-3 Switching on and switching off the motor and reversing in the factory setting The ramp-up and ramp-down times define the maximum motor acceleration when the speed setpoint changes. The ramp-up and ramp-down time is derived from the time between motor standstill and the maximum speed, or between the maximum speed and motor standstill. - Page 110 Commissioning 5.3 Prepare commissioning Criteria for selecting either V/f control or speed control In many applications, the V/f control suffices to change the speed of induction motors. Examples of typical applications for V/f control include: ● Pumps ● Fans ● Compressors ●...
-
Page 111: Defining Additional Requirements For The Application
Motor data using p300 and p301 Preassigned motor data using p0300 and p0301 The SINAMICS G110M software has been configured to utilize the input of the motor data using a motor code. There are two parameters associated with this function, they are p0300 (motor type) and p0301 (motor code). - Page 112 Commissioning 5.4 Quick commissioning Motor type Power rating (kW) Motor code for p0301 1LA7 0.37 17726 1LE1 0.75 12017 1LE1 1.10 12018 1LE1 1.50 12019 1LE1 2.20 12020 1LE1 3.00 12021 1LE1 4.00 12023 When the relevant motor code is entered, the motor data automatically assigned for the selected motor.
-
Page 113: Quick Commissioning With Dip Switches
Communications and Power Interface, including the Control Module comprise all the components that make up a standard Control Unit configuration; but when assembly and installing the SINAMICS G110M system, the Control Module requires a unique designation so that it can be easily identified in the installation procedures. - Page 114 Commissioning 5.4 Quick commissioning Figure 5-5 DIP Switches location Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 115 Commissioning 5.4 Quick commissioning Accessing the DIP switches DANGER Dangerous voltages and currents are present in the active converter When power is applied to the converter, even when it is not active, dangerous levels of voltage and current are present in the system. Before attempting the removal of any components of the system the following steps should be taken to ensure that the system is completely safe: 1.
- Page 116 Commissioning 5.4 Quick commissioning The DIP switches allows specific functions of the converter to be set and are shown in the table below. Table 5- 2 Function of the DIP switches DIP switch Function ① Selects current or voltage input for the analog inputs. Temperature sensor - sets the type of temperature sensor fitted to the motor.
- Page 117 Commissioning 5.4 Quick commissioning Figure 5-8 Commissioning DIP Switch 1 Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 118 Commissioning 5.4 Quick commissioning Figure 5-9 Commissioning DIP Switch 2 Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 119: Basic Commissioning With The Iop-2
Commissioning 5.4 Quick commissioning 5.4.3 Basic commissioning with the IOP-2 Basic commissioning wizard NOTICE Requirements prior to using the Basic Commissioning Wizard • The user must be fully conversant with all safety instructions as detailed in the "Fundamental Safety Instructions" section of the Operating Instructions for your converter. - Page 120 Commissioning 5.4 Quick commissioning Select Continue Select Application Class Select Motor Data Select Enter Motor Data Select Motor Type Select Characteristic Select Continue Input Motor Frequency Input Motor Voltage Input Motor Current Input Power Rating Input Motor Speed Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 121 Commissioning 5.4 Quick commissioning Select Technology Applica- Select required Motor Data Select Macro Source tion ID function Input the Minimum Frequen- Input Maximum Frequency Input Ramp-up time Input Ramp-down time Summary of Settings - Select Save Settings Continue Settings saved Status Screen displayed On first ON command - Motor ID is performed...
-
Page 122: P0015 Macros
Commissioning 5.4 Quick commissioning 5.4.4 p0015 Macros Macros for the CU240M The macros that are available for the CU240M Control Modules are shown in the figures below. Macro 7 is the default setting for the CU240M DP and CU240M PN Control Modules, Macro 21 is the default settings for the CU240M USS Control Module and Macro 30 is the default settings for the CU240M ASi Control Modules. - Page 123 Commissioning 5.4 Quick commissioning Figure 5-12 Macro 12 - Two-wire control with method 1 Figure 5-13 Macro 17 - Two-wire control with method 2 Figure 5-14 Macro 18 - Two-wire control with method 3 Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 124 Commissioning 5.4 Quick commissioning Figure 5-15 Macro 19 - Three-wire control with method 1 Figure 5-16 Macro 20 - Three-wire control with method 2 Figure 5-17 Macro 21 - Fieldbus USS Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 125 Commissioning 5.4 Quick commissioning Figure 5-18 Macro 28 - Conveyor with 2 fixed setpoints Figure 5-19 Macro 29 - Conveyer with potentiometer and fixed setpoint (default USS) Figure 5-20 Macro 30 - ASi Single slave with fixed setpoints (default ASi) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 126 Commissioning 5.4 Quick commissioning Figure 5-21 Macro 31 - ASi Dual slave with fixed setpoints Figure 5-22 Macro 32 - ASi Single slave with analog setpoint Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 127: Quick Commissioning With Starter
Commissioning 5.4 Quick commissioning Figure 5-23 Macro 33 - 4DI decentral conveyor with fieldbus Figure 5-24 Macro 34 - ASi Dual slave with setpoint 5.4.5 Quick commissioning with STARTER The screen forms that are shown in this manual show generally valid examples. The number of setting options available in screen forms depends on the particular inverter type. -
Page 128: Adapting The Usb Interface
Commissioning 5.4 Quick commissioning Commissioning using STARTER The following interfaces - which are control unit dependent - are available: Table 5- 3 Connection possibilities for STARTER Type PROFIBUS PROFINET PC connected to CU using USB cable PROFIBUS interface PROFINET interface Interface Mini-USB M12 - 5 pole con-... -
Page 129: Generating A Starter Project
Commissioning 5.4 Quick commissioning 6. Then click on "Update". The connected converters are now displayed in "Accessible nodes". 7. Close this screen form without selecting the converter(s) that has/have been found. 8. Create your STARTER project (Page 129). You have set the USB interface. 5.4.5.2 Generating a STARTER project Creating a STARTER project using project wizards... -
Page 130: Go Online And Start The Configuration Wizards - Starter
Commissioning 5.4 Quick commissioning 5.4.5.3 Go online and start the configuration wizards - STARTER Procedure with STARTER Proceed as follows to start the quick commissioning of the inverter: 1. Select your project and go online: 2. In the following screen form, select the inverter with which you wish to go online. - Page 131 Commissioning 5.4 Quick commissioning Select the I/O configuration to preassign the inverter interfaces. Optimizing the closed-loop speed controller (Page 240) V/f control (Page 233) Set the applicable motor standard and the inverter supply voltage. Select the application for the inverter: ●...
- Page 132 Commissioning 5.4 Quick commissioning Motor identification: ● [1]: Recommended setting. Measure the motor data at standstill and with the motor rotating. The inverter switches off the motor after the motor data identification has been completed. ● [2]: Measure the motor data at standstill. The inverter switches off the motor after the motor data identification has been completed.
-
Page 133: Identify Motor Data - Starter
Commissioning 5.4 Quick commissioning 5.4.5.4 Identify motor data - STARTER Identify motor data WARNING Unexpected machine motion while the motor data identification is in progress The stationary measurement can turn the motor a number of revolutions. The rotating measurement accelerates the motor up to the rated speed. Secure dangerous machine parts before starting motor data identification: •... -
Page 134: Restoring The Factory Settings
Commissioning 5.5 Restoring the factory settings 4. Switch on the motor. The inverter starts the motor data identification. This measurement can take several minutes. Depending on the setting, after motor data identification has been completed, the inverter switches off the motor - or it accelerates it to the currently set setpoint. 5. -
Page 135: Resetting The Safety Functions To The Factory Setting
Commissioning 5.5 Restoring the factory settings 5.5.1 Resetting the safety functions to the factory setting Procedure with STARTER To reset the safety function settings to the factory setting without changing the standard settings, proceed as follows: 1. Go online. 2. Open the screen form of the safety functions. 3. - Page 136 Commissioning 5.5 Restoring the factory settings Procedure with Startdrive To reset the safety function settings to the factory setting without changing the standard settings, proceed as follows: 1. Go online. 2. Select "Commissioning". 3. Select "Backing up/reset". 4. Select "Safety parameters are reset". 5.
-
Page 137: Restore The Factory Settings (Without Safety Functions)
Commissioning 5.5 Restoring the factory settings 5. Set p0971 = 1. 6. Wait until the inverter sets p0971 = 0. 7. Switch off the inverter supply voltage. 8. Wait until all LEDs on the inverter go dark. 9. Switch on the inverter supply voltage again. You have restored the safety function settings of your inverter to the factory settings. - Page 138 Commissioning 5.5 Restoring the factory settings 5. Press the "Start" button. 6. Wait until the inverter has been reset to the factory setting. You have reset the inverter to factory settings. Procedure with the BOP-2 operator panel Proceed as follows to reset the inverter to factory settings: 1.
-
Page 139: Advanced Commissioning
Advanced commissioning Overview of converter functions Figure 6-1 Overview of converter functions Drive control The inverter receives its commands from the higher-level control via the terminal strip or the fieldbus interface of the Control Unit. The drive control defines how the inverter responds to the commands. - Page 140 Advanced commissioning 6.1 Overview of converter functions Motor holding brake (Page 185) The free function blocks permit configurable signal processing within the inverter. Free function blocks (Page 189) You can select in which physical units the inverter represents its associated values. Selecting physical units (Page 189) Safety functions The safety functions fulfill increased requirements regarding the functional safety of the...
- Page 141 Advanced commissioning 6.1 Overview of converter functions Motor temperature monitoring using a temperature sensor (Page 264) Motor protection by calculating the temperature (Page 267) Motor and inverter protection by limiting the voltage (Page 269) The monitoring of the driven load prevents impermissible operating modes, e.g. dry-running of a pump.
-
Page 142: Sequence Control When Switching The Motor On And Off
Advanced commissioning 6.2 Sequence control when switching the motor on and off Sequence control when switching the motor on and off After switching the supply voltage on, the inverter normally goes into the "ready to start" state. In this state, the inverter waits for the command to switch on the motor: The inverter switches on the motor with the ON command. -
Page 143: Adapt The Default Setting Of The Inputs And Outputs
Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs Table 6- 2 Inverter states In this state, the inverter does not respond to the ON command. The inverter goes into this state under the following conditions: ON was active when switching on the inverter. •... -
Page 144: Digital Inputs
Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs 6.3.1 Digital Inputs Changing the function of the digital input Interconnect the status parameter of the digital input with a binector input of your choice. Interconnecting signals in the inverter (Page 359) Binector inputs are marked with "BI"... -
Page 145: Digital Outputs
Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs For more information, see the parameter list and the function block diagrams 2210 ff of the List Manual. Analog inputs as digital inputs When required, you can use the analog inputs as additional digital inputs. -
Page 146: Analog Inputs
Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs Advanced settings You can invert the signal of the digital output using parameter p0748. For more information, see the parameter list and the function block diagram 2241 of the List Manual. - Page 147 Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs Figure 6-4 Analog DIP Switch As previously mentioned, parameter p0756 can be modified to change the type of analog input. The default settings for parameter p0756 and its default settings are given in the following table.
- Page 148 Advanced commissioning 6.3 Adapt the default setting of the inputs and outputs Table 6- 5 Parameters for the scaling characteristic and wire break monitoring Parameter Description p0757 x-coordinate of 1st characteristic point [V] p0758 y coordinate of the 1st characteristic point [% of p200x] p200x are the parameters of the reference variables, e.g.
-
Page 149: Drive Control Via Profibus Or Profinet
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Specify deadband Small signals of a few millivolts are often corrupted by interference in the cable. To be able to enter a setpoint of exactly 0 V via an analog input, you must specify a deadband. Figure 6-6 Deadband of the analog input Table 6- 7... -
Page 150: Telegrams
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Figure 6-8 Telegram structure Every telegram for cyclic data exchange has the following basic structure: ● Header and trailer form the protocol frame. ● User data is located within the frame: –... - Page 151 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET 16-bit speed setpoint with torque limiting 16-bit speed setpoint for PCS7 16-bit speed setpoint with reading and writing to parameters 16-bit speed setpoint for PCS7 with reading and writing to parameters Unassigned interconnection and length Table 6- 8 Explanation of the abbreviations...
- Page 152 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Abbreviation Explanation Abbreviation Explanation NIST_A_GLATT Smoothed actual speed WARN_CODE Alarm code value IAIST_GLATT Smoothed current actual MELD_NAMUR Message according to the VIK- value NAMUR definition Interconnection of the process data Figure 6-9 Interconnection of the send data In the inverter, the send data are available in the "Word"...
-
Page 153: Control And Status Word 1
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET telegram, then the inverter automatically interconnects parameters r2050, r2060 and r2090 …r2093 with the appropriate signals. If you wish to adapt a predefined telegram, then you must interconnect the send and receive data with the appropriate signals. - Page 154 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Significance Explanation Signal inter- connection Telegram 20 All other tele- in the in- grams verter 1 = Enable setpoint Motor accelerates with the ramp-up time p1120 to the setpoint. 0 → 1 = Acknowledge faults Acknowledge fault.
-
Page 155: Control And Status Word 3
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Significance Comments Signal inter- connection Telegram 20 All other tele- in the in- grams verter 1 = Alarm active Motor remains switched on; no acknowl- p2080[7] = edgement is necessary. r2139.7 1 = Speed deviation within the Setpoint / actual value deviation within the p2080[8] =... - Page 156 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Bit Meaning Explanation Signal interconnection in the inverter Telegram 350 10 Not used 11 1 = Enable droop Enable or inhibit speed control- p1492[0] = r2093.11 ler droop. 12 1 = torque control active Changes over the control mode p1501[0] = r2093.12 for vector control.
-
Page 157: Namur Message Word
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Meaning Description Signal intercon- nection in the inverter Not used Not used 6.4.5 NAMUR message word Fault word according to the VIK-NAMUR definition (MELD_NAMUR) Table 6- 9 Fault word according to the VIK-NAMUR definition and interconnection with parameters in the inverter Bit Significance P no. -
Page 158: Parameter Channel
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET 6.4.6 Parameter channel Structure of the parameter channel The parameter channel consists of four words. The 1st and 2nd words transfer the parameter number, index and the type of task (read or write). The 3rd and 4th words contain the parameter content. - Page 159 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Table 6- 11 Response identifiers, inverter → control Description No response Transfer parameter value (word) Transfer parameter value (double word) Transfer descriptive element Transfer parameter value (field, word) Transfer parameter value (field, double word) Transfer number of field elements Inverter cannot process the request.
- Page 160 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Description 86 hex Write access only for commissioning (p0010 = 15) (operating state of the inverter prevents a parameter change) 87 hex Know-how protection active, access locked C8 hex Change request below the currently valid limit (change request to a value that lies within the "absolute"...
-
Page 161: Examples For Using The Parameter Channel
Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET PWE 1 PWE 2 Connector Bit 15 … 0 Bit 15 … 10 Bit 9 … 0 Number of the connector 3F hex The index or bit field number of the con- nector 6.4.7 Examples for using the parameter channel... - Page 162 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET ● PWE1, bit 0 … 15: = 0 hex ● PWE2, bit 0 … 15: = 1A hex (26 = 1A hex) Figure 6-12 Telegram, to activate the automatic restart with p1210 = 26 Write request: Assign digital input 2 with the function ON/OFF1 (p0840[1] = 722.2) In order to link digital input 2 with ON/OFF1, you must assign parameter p0840[1] (source, ON/OFF1) the value 722.2 (DI 2).
-
Page 163: Extend Telegrams And Change Signal Interconnection
Standard telegram 20, PZD-2/6 350: SIEMENS telegram 350, PZD-4/4 352: SIEMENS telegram 352, PZD-6/6 353: SIEMENS telegram 353, PZD-2/2, PKW-4/4 354: SIEMENS telegram 354, PZD-6/6, PKW-4/4 r2050[0…11] PROFIdrive PZD receive word Connector output to interconnect the PZD (setpoints) in the word format received from the PROFIdrive controller. - Page 164 Advanced commissioning 6.4 Drive control via PROFIBUS or PROFINET Procedure Proceed as follows to change the signal interconnection of a telegram: 1. Using STARTER or an operator panel, set parameter p0922 = 999. 2. Using STARTER or an operator panel, set parameter p2079 = 999. 3.
-
Page 165: Slave-To-Slave Communication
Further information about acyclic communication is provided in the Fieldbus function manual. Manuals for your converter (Page 372) Application example, "Read and write to parameters" Further information is provided in the Internet: Application examples (https://support.industry.siemens.com/cs/ww/en/view/29157692) Control via AS-i 6.5.1 Single slave mode In Single Slave mode, four bits are available for the communication between the AS-i master and the inverter. - Page 166 6.5 Control via AS-i -> p1023 = 2093.3 Fixed speed bit 3 • AS-i.DO3 AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). Inverter -> control If the control specifies the speed setpoint, the inverter replies: -> AS-i.DI0 Operational enable for PLC • p2080[0] = 53.13 •...
-
Page 167: Dual Slave Mode
• AS-i.P2 Scaling factor bit 3 • AS-i.P3 AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). 6.5.2 Dual slave mode In Dual Slave mode, eight bits are available for the communication between the AS-i master and the inverter. The eight bits are used to transfer process data. In parallel, the control can start a diagnostic request via AS-i.P0. - Page 168 If the control sends a diagnostic request via AS-i.P0, the inverter replies with the currently pending fault or alarm messages. AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). Default setting 31, slave 1 with profile 7.A.5: Control -> inverter -> Time signal for the CTT2 transfer from the AS-i master •...
- Page 169 If the control sends a diagnostic request via AS-i.P0, the inverter replies with the currently pending fault or alarm messages. AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). Default setting 34, slave 1 with profile 7.A.5: Control -> inverter -> Time signal for the CTT2 transfer from the AS-i master •...
-
Page 170: Assignment Tables
Advanced commissioning 6.5 Control via AS-i 6.5.3 Assignment tables Fixed speeds - Single Slave Table 6- 14 Fixed speeds via the motor control bits AS-i.DO3 AS-i.DO2 AS-i.DO1 AS-i.DO0 Response in the inverter OFF1 On + fixed speed 1 (factory setting: 1500 rpm) On + fixed speed 2 (factory setting: -1500 rpm) On + fixed speed 3 (factory setting: 300 rpm) On + fixed speed 4 (factory setting: 450 rpm) - Page 171 Advanced commissioning 6.5 Control via AS-i AS-i.P3 AS-i.P2 AS-i.P1 AS-i.P0 Scaling factor Frequency (Hz) 0.07 0.05 Fixed speeds - Dual Slave Table 6- 16 Fixed speeds via the motor control bits and response in the inverter AS-i.DO2 AS-i.DO1 AS-i.DO0 Response in the inverter OFF1 On + fixed speed 1 (factory setting: 1500 rpm) On + fixed speed 2 (factory setting: -1500 rpm)
-
Page 172: Cyclic And Acyclic Communication Via Ctt2
Access to analog values via DS140 … DS147. See CP 343−2 4 bytes: PWE1, PWE2 / CP 343−2 P AS−Interface master 4 bytes: PWE1, PWE2 (https://support.industry.siemens.com/cs/gb/en/view/1171856) , Chapter 4 Acyclic communication - standard 10 hex Read request: Master -> slave... -
Page 173: Cyclic Communication
Advanced commissioning 6.5 Control via AS-i If an acyclical request cannot be executed by the inverter, it replies with one of the following error messages. Error message Meaning No fault Invalid index Incorrect length Request not implemented Busy (the request could not be processed completely within the time window, retry later) Last acyclical request was not confirmed Invalid subindex... -
Page 174: Acyclic Communication - Standard
The PIV format structure is identical with that for the USS parameter channel. AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). To reduce the transfer volume, there is not only the "normal" "data exchange" PIV mechanism, but also the "Read data" and "Write data" commands. - Page 175 In the event of a fault, the inverter sends the following telegram as reponse to the master: Value for PWE: Fault table from AS-i System Interface Manual (https://support.industry.siemens.com/cs/gb/en/view/1171856). Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 176: Jogging
Advanced commissioning 6.6 Jogging Jogging The "Jog" function is typically used to temporarily move a machine part using local control commands, e.g. a transport conveyor belt. Commands "Jog 1" or "Jog: 2" switch the motor on and off. The commands are only active when the inverter is in the "Ready for switching on"... -
Page 177: Limit Position Control
Advanced commissioning 6.7 Limit position control Limit position control Limit position and limit switch A limit position is a position in the direction of motion of a machine component at which the motion stops due to the construction. A limit switch is a sensor that signals that the limit position has been reached. - Page 178 Advanced commissioning 6.7 Limit position control ① The motor moves the machine component in the direction of the positive limit position. ② The positive limit position has been reached. The motor stops with the OFF3 ramp-down time. ③ The motor moves the machine component in the opposite direction at a 0 → 1 signal change. ④...
- Page 179 Advanced commissioning 6.7 Limit position control Application example: Roller conveyor with rotary table A rotary table in a roller conveyor redi- rects the material at the crossing of two conveyor lines. The rotary table rotates through 90° from one limit position to the other.
-
Page 180: Quick Stop Function
Advanced commissioning 6.8 Quick Stop function 3. Move the rotary table to one of the two limit positions or open one of the limit switches manually. 4. Specify a speed setpoint. We recommend that you use a fixed setpoint for the limit position control. - Page 181 Advanced commissioning 6.8 Quick Stop function Figure 6-17 Conveyor example 2 The load is then slowed down and stopped. Figure 6-18 Conveyor example 3 There are two sensors on the conveyor section, so that the Quick Stop function can stop the conveyor section in either direction when a load is detected.
- Page 182 Advanced commissioning 6.8 Quick Stop function Parameter Description Remarks r0885 Quick Stop status Bit field describing status of quick stop Bit /description 1 0 00: Quick Stop is active 01: Quick Stop selected 02: Override selected 03: - 04: Quick Stop Enabled P0886 Quick Stop input type Control Word for selecting the Quick Stop input type.
-
Page 183: Switching Over The Drive Control (Command Data Set)
Advanced commissioning 6.9 Switching over the drive control (command data set) Switching over the drive control (command data set) Several applications require the option of switching over the control authority to operate the inverter. Example: The motor is to be operable either from a central control via the fieldbus or via the local digital inputs of the inverter. - Page 184 Advanced commissioning 6.9 Switching over the drive control (command data set) An overview of all the parameters that belong to the command data sets is provided in the List Manual. Note The converter requires approx. 4 ms to switch over the command data set. Advanced settings To change the number of command data sets in STARTER, you must open your STARTER project offline.
-
Page 185: Motor Holding Brake
Advanced commissioning 6.10 Motor holding brake 6.10 Motor holding brake The motor holding brake holds the motor in position when it is switched off. When the "Motor holding brake" function is correctly set, the motor remains switched on as long as the motor holding brake is open. The inverter only switches the motor off when the motor holding brake is closed. - Page 186 Advanced commissioning 6.10 Motor holding brake 3. When the first of the two times (p1227 or p1228) has elapsed, the inverter issues the command to close the brake. 4. After the "motor holding brake closing time" p1217, the inverter switches off the motor. The motor holding brake must close within the time p1217.
- Page 187 Advanced commissioning 6.10 Motor holding brake Precondition The motor holding brake is connected to the inverter. Procedure To commission the "motor holding brake" function, proceed as follows: 1. Set p1215 = 1. The "Motor holding brake" function" is enabled. 2. Check the magnetizing time p0346. The magnetizing time must be greater than zero.
- Page 188 Advanced commissioning 6.10 Motor holding brake 8. Switch off the motor. 9. Check the behavior of the drive immediately after the motor has been switched off: – If the motor holding brake closes too late, the load briefly sags before the motor holding brake closes.
-
Page 189: Free Function Blocks
6.11.2 Further information Application description for the free function blocks Further information is provided in the Internet: Function Manual (https://support.industry.siemens.com/cs/gb/en/view/60467055/29243398027) 6.12 Selecting physical units 6.12.1 Select the motor standard Selection options and parameters involved The inverter represents the motor data corresponding to motor standard IEC or NEMA in different system units: SI units or US units. -
Page 190: Selecting The System Of Units
Advanced commissioning 6.12 Selecting physical units Setting the motor standard using p0100 is part of quick commissioning. Table 6- 22 Parameters involved when selecting the motor standard Parame- Designation Motor standard IEC/NEMA, p0100 = IEC motor NEMA motor NEMA motor 50 Hz, SI units 60 Hz, US units 60 Hz, SI units... -
Page 191: Selecting The Technological Unit Of The Technology Controller
Advanced commissioning 6.12 Selecting physical units For variables, which cannot be represented as [%], then the following applies: p0505 = 1 ≙ p0505 = 2 and p0505 = 3 ≙ p0505 = 4. In the case of variables whose units are identical in the SI system and US system, and which can be displayed as a percentage, the following applies: p0505 = 1 ≙... -
Page 192: Setting The Motor Standard, System Of Units And Technology Unit Using Starter
Advanced commissioning 6.12 Selecting physical units Unit group Parameters involved with p0595 belong to unit group 9_1. More information on this topic is provided in the List Manual. Manuals for your converter (Page 372) Special features You must optimize the technology controller after changing p0595 or p0596. 6.12.4 Setting the motor standard, system of units and technology unit using STARTER... -
Page 193: Safe Torque Off (Sto) Safety Function
Advanced commissioning 6.13 Safe Torque Off (STO) safety function 6. Save your settings. 7. Go online. The inverter signals that offline, other units and process variables are set than in the inverter itself. 8. Accept these settings in the inverter. You have selected the motor standard and system of units using STARTER. - Page 194 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Table 6- 23 The principle of operation of STO Safe Torque Off (STO) Standard inverter functions linked with STO 1. The inverter recognizes the selection of STO via a safety-relevant input or via the PROFIsafe safe communication.
- Page 195 Advanced commissioning 6.13 Safe Torque Off (STO) safety function The distinction between Emergency Off and Emergency Stop "Emergency Off" and "Emergency Stop" are commands that minimize different risks in the machine or plant. The STO function is suitable for achieving an emergency stop but not an emergency off. Risk: Risk of electric shock: Risk of unexpected motion:...
-
Page 196: Precondition For Using Sto))
Advanced commissioning 6.13 Safe Torque Off (STO) safety function Application examples for the STO function The STO function is suitable for applications where the motor is already at a standstill or will come to a standstill in a short, safe period of time through friction. STO does not shorten the run-on of machine components with high inertia. - Page 197 Advanced commissioning 6.13 Safe Torque Off (STO) safety function The probabilities of failure (PFH) and the certification of the safety functions also apply when no password has been set. What do I do if I lose the password? If you no longer know the password but still want to change the settings for safety functions, proceed as follows: 1.
-
Page 198: Configuring Safety Function
Advanced commissioning 6.13 Safe Torque Off (STO) safety function 6.13.3.3 Configuring safety function Procedure with STARTER To configure the safety functions, proceed as follows: 1. Go online. 2. Select the "Safety Integrated" function 3. Select "Change settings". 4. Select "Basic functions via onboard terminals": You have configured the safety functions. - Page 199 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure with Startdrive Proceed as follows to configure the safety functions: 1. Select "Select safety functionality". 2. Select "Basic functions". 3. Select "Control type/safety functions". 4. Select "Via terminals" as control type for the safety functions. You have configured the safety functions Additional configurations of the safety functions are described in the "Safety Integrated"...
-
Page 200: Interconnecting The "Sto Active" Signal
Advanced commissioning 6.13 Safe Torque Off (STO) safety function Parameter Description p9761 Enter a password (factory setting: 0000 hex) Permissible passwords lie in the range 1 … FFFF FFFF. p9762 New password p9763 Password confirmation 6.13.3.4 Interconnecting the "STO active" signal If you require the feedback signal "STO active"... -
Page 201: Setting The Filter For Fail-Safe Digital Inputs
Advanced commissioning 6.13 Safe Torque Off (STO) safety function You have interconnected the "STO active" checkback signal. After STO has been selected, the inverter signals "STO active" to the higher-level control. Parameter Description r9773.01 1 signal: STO is active in the drive 6.13.3.5 Setting the filter for fail-safe digital inputs Requirement... - Page 202 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure with Startdrive Proceed as follows to set the input filter and the simultaneity monitoring of the fail-safe digital input: 1. Navigate to the filter settings. 2. Set the debounce time for the F-DI input filter. 3.
- Page 203 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Filter to suppress short signals In the following cases, an immediate inverter response to signal changes of the fail-safe digital inputs is not desirable: ● If a fail-safe digital input of the inverter is interconnected with an electromechanical sensor, signal changes can occur due to contact bounce.
-
Page 204: Basic Filter Parameters
Advanced commissioning 6.13 Safe Torque Off (STO) safety function 6.13.3.6 Basic filter parameters Parameter Description p9650 F-DI changeover tolerance time (factory setting: 500 ms) Tolerance time to change over the fail-safe digital input for the basic functions. p9651 STO debounce time (factory setting: 1 ms) Debounce time of the fail-safe digital input for the basic functions. - Page 205 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure with Startdrive To set the forced checking procedure (test stop) of the basic functions, proceed as follows: 1. Select the screen form for setting the forced checking procedure. 2. Set the monitoring time to a value to match your application. 3.
-
Page 206: Activating The Settings And Checking The Digital Inputs
Advanced commissioning 6.13 Safe Torque Off (STO) safety function 6.13.3.8 Activating the settings and checking the digital inputs Activate settings Requirement You are online with STARTER or Startdrive online. Procedure with STARTER To activate the settings for the safety functions, proceed as follows: 1. - Page 207 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure with Startdrive To activate the settings of the safety functions in the drive, proceed as follows: 1. Click the "End safety commissioning" button. 2. Confirm the prompt for saving your settings (copy RAM to ROM). 3.
- Page 208 Advanced commissioning 6.13 Safe Torque Off (STO) safety function If you control the safety functions in the inverter via fail-safe digital inputs, then you must check as to whether the fail-safe digital inputs are in some instances interconnected with a "standard"...
- Page 209 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure with Startdrive Proceed as follows to check as to whether the fail-safe digital inputs are only used for the safety functions: 1. Select the screen for the digital inputs. 2. Remove all interconnections of the digital inputs that you use as fail-safe digital input F- 3.
-
Page 210: Acceptance - Completion Of Commissioning
Advanced commissioning 6.13 Safe Torque Off (STO) safety function 6.13.3.9 Acceptance - completion of commissioning What is an acceptance? The machine manufacturer is responsible in ensuring that his plant or machine functions perfectly. As a consequence, after commissioning, the machine manufacturer must check those functions or have them checked by specialist personnel, which represent an increased risk of injury or material damage. - Page 211 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Documentation of the inverter The following must be documented for the inverter: ● The results of the acceptance test. ● The settings of the integrated drive safety functions. The STARTER commissioning tool logs the settings of the integrated drive functions, if necessary.
- Page 212 Advanced commissioning 6.13 Safe Torque Off (STO) safety function Procedure Proceed as follows to create the acceptance documentation for the drive using STARTER: 1. In STARTER, select "Create acceptance documentation": STARTER has templates in German and English. 2. Select the suitable template and create a report for each drive of your machine or system: –...
-
Page 213: Setpoints
Advanced commissioning 6.14 Setpoints 6.14 Setpoints 6.14.1 Overview The inverter receives its main setpoint from the setpoint source. The main setpoint generally specifies the motor speed. Figure 6-33 Setpoint sources for the inverter You have the following options when selecting the source of the main setpoint: ●... -
Page 214: Analog Input As Setpoint Source
Advanced commissioning 6.14 Setpoints Under the following conditions, the inverter switches from the main setpoint to other setpoints: ● When the technology controller is active and appropriately interconnected, its output specifies the motor speed. ● When jogging is active. ● When controlling from an Operator Panel or a STARTER or Startdrive PC tool. 6.14.2 Analog input as setpoint source Interconnecting an analog input... -
Page 215: Electromechanical Potentiometer
Advanced commissioning 6.14 Setpoints Most standard telegrams receive the speed setpoint as a second process data PZD2. Table 6- 25 Setting the fieldbus as setpoint source Parameter Remark p1070 = 2050[1] Main setpoint Interconnect the main setpoint with process data PZD2 from the fieldbus. p1075 = 2050[1] Additional setpoint Interconnect the additional setpoint with process data PZD2 from the fieldbus. -
Page 216: Motorized Potentiometer As Setpoint Source
Advanced commissioning 6.14 Setpoints 6.14.5 Motorized potentiometer as setpoint source The "Motorized potentiometer" function emulates an electromechanical potentiometer. The output value of the motorized potentiometer can be set with the "higher" and "lower" control signals. Interconnecting the motorized potentiometer (MOP) with the setpoint source Figure 6-37 Motorized potentiometer as setpoint source Figure 6-38... - Page 217 Advanced commissioning 6.14 Setpoints Table 6- 28 Extended setup of motorized potentiometer Parameter Description p1030 MOP configuration (factory setting: 00110 bin) Storage active = 0: After the motor has been switched on, the setpoint = p1040 = 1: After the motor has switched off, the inverter saves the setpoint. After the motor has switched on, the setpoint = the stored value Automatic mode, ramp-function generator active (1-signal via BI: p1041) = 0: Ramp-up/ramp-down time = 0...
-
Page 218: Fixed Speed Setpoint As Setpoint Source
Advanced commissioning 6.14 Setpoints 6.14.6 Fixed speed setpoint as setpoint source In many applications after switching on the motor, all that is needed is to run the motor at a constant speed or to switch between different speeds. Example: After it has been switched on, a conveyor belt only runs with two different velocities. - Page 219 Advanced commissioning 6.14 Setpoints Selecting the fixed speed setpoint, binary You set 16 different fixed speed setpoints. You precisely select one of these 16 fixed speed setpoints by combining four selection bits. Figure 6-41 Simplified function diagram when selecting the fixed speed setpoints, binary Additional information about binary selection can be found in function diagram 3010 in the List Manual.
-
Page 220: Setpoint Calculation
Advanced commissioning 6.15 Setpoint calculation 6.15 Setpoint calculation 6.15.1 Overview of setpoint processing The setpoint can be modified as follows using the setpoint processing: ● Invert setpoint to reverse the motor direction of rotation (reversing). ● Inhibit positive or negative direction of rotation, e.g. for conveyor belts, pumps or fans. ●... -
Page 221: Inhibit Direction Of Rotation
Advanced commissioning 6.15 Setpoint calculation To invert the setpoint via an external signal, interconnect parameter p1113 with a binary signal, e.g. digital input 1. Table 6- 30 Application example for inverting the setpoint Parameter Remark p1113 Setpoint inversion (factory setting depends on the inverter) p1113 = 722.1 Digital input 1 = 0: Setpoint remains unchanged. -
Page 222: Skip Frequency Bands And Minimum Speed
Advanced commissioning 6.15 Setpoint calculation 6.15.4 Skip frequency bands and minimum speed Skip frequency bands The inverter has four skip frequency bands that prevent continuous motor operation within a specific speed range. Further information is provided in function diagram 3050 of the List Manual. -
Page 223: Speed Limitation
Advanced commissioning 6.15 Setpoint calculation 6.15.5 Speed limitation The maximum speed limits the speed setpoint range for both directions of rotation. The converter generates a message (fault or alarm) when the maximum speed is exceeded. If you must limit the speed depending on the direction of rotation, then you can define speed limits for each direction. - Page 224 Advanced commissioning 6.15 Setpoint calculation Extended ramp-function generator The ramp-up and ramp-down times of the extended ramp-function generator can be set independently of each other. The optimum times that you select depend on your particular application in question and can range from just a few 100 ms (e.g. for belt conveyor drives) to several minutes (e.g.
- Page 225 Advanced commissioning 6.15 Setpoint calculation Table 6- 34 Additional parameters to set the extended ramp-function generator Parameter Description p1115 Ramp-function generator selection (factory setting: 1) Select ramp-function generator: 0: Basic ramp-function generator 1: Extended ramp-function generator p1120 Ramp-function generator, ramp-up time (factory setting: 10 s) Accelerating time in seconds from zero speed up to the maximum speed p1082 p1121 Ramp-function generator, ramp-down time (factory setting: 10 s)
- Page 226 Advanced commissioning 6.15 Setpoint calculation 3. Evaluate your drive response. – If the motor accelerates too slowly, then reduce the ramp-up time. An excessively short ramp-up time means that the motor will reach its current limiting when accelerating, and will temporarily not be able to follow the speed setpoint. In this case, the drive exceeds the set time.
- Page 227 Advanced commissioning 6.15 Setpoint calculation When compared to the extended ramp-function generator, the basic ramp-function generator has no rounding times. Table 6- 35 Parameters for setting the ramp-function generator Parameter Description p1115 = 0 Ramp-function generator selection (factory setting: 1) Select ramp-function generator: 0: Basic ramp-function generator 1: Extended ramp-function generator...
-
Page 228: Pid Technology Controller
PZD receive word 3. The inverter receives the value for scaling the ramp-up and ramp-down times via PZD receive word 3. Further information is provided in the Internet: Function Manual (https://support.industry.siemens.com/cs/gb/en/view/60467055/29243398027) 6.16 PID technology controller 6.16.1 Overview The technology controller controls process variables, e.g. pressure, temperature, level or flow. -
Page 229: Setting The Controller
● PID controller Principle of operation of the D component, inhibiting the I component and the control sense ● Enable, limiting the controller output and fault response FAQ (http://support.automation.siemens.com/WW/view/en/92556266) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH... - Page 230 Advanced commissioning 6.16 PID technology controller Setting the technology controller Parameter Remark p2200 BI: Technology controller enable (factory setting: 0) 1 signal: Technology controller is enabled. r2294 CO: Technology controller output signal To interconnect the main speed setpoint with the technology controller output, set p1070 = 2294.
- Page 231 Advanced commissioning 6.16 PID technology controller Parameter Remark Inversion actual value signal If the actual value decreases with increasing motor speed, then p2271 must be set = 1. p2270 Technology controller actual value function No function √ For further information refer to the function block diagrams 7950 ff of the List Manual. Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 232: Optimizing The Controller
Advanced commissioning 6.16 PID technology controller 6.16.3 Optimizing the controller Manually setting the technology controller Procedure Proceed as follows to manually set the technology controller: 1. Temporarily set the ramp-up and ramp-down times of the ramp-function generator (p2257 and p2258) to zero. 2. -
Page 233: Motor Control
Advanced commissioning 6.17 Motor control 6.17 Motor control The inverter has two alternative methods to control (closed loop) the motor speed: ● U/f control ● Vector control 6.17.1 V/f control Overview of the U/f control The U/f control is a closed-loop speed control with the following characteristics: ●... -
Page 234: Characteristics Of U/F Control
Advanced commissioning 6.17 Motor control 6.17.1.1 Characteristics of U/f control The inverter has different V/f characteristics. ① The voltage boost of the characteristic optimizes the speed control at low speeds ② With the flux current control (FCC), the inverter compensates for the voltage drop in the stator resistor of the motor Figure 6-47 Characteristics of V/f control... -
Page 235: Selecting The U/F Characteristic
Advanced commissioning 6.17 Motor control The value of the output voltage at the rated motor frequency also depends on the following variables: ● Ratio between the inverter size and the motor size ● Line voltage ● Line impedance ● Actual motor torque The maximum possible output voltage as a function of the input voltage is provided in the technical data. -
Page 236: Optimizing Motor Starting
Advanced commissioning 6.17 Motor control Requirement Application Remark Characteristic Parameter examples Freely adjustable U/f char- Adjustable p1300 = 3 acteristic characteristic U/f characteristic with inde- The interrelationship between the frequency Independent p1300 = 19 pendent voltage setpoint and voltage is not calculated in the inverter, voltage set- but is specified by the user. - Page 237 Advanced commissioning 6.17 Motor control In applications with a high break loose torque, you must also increase parameter p1312 in order to achieve a satisfactory motor response. You have set the voltage boost. Figure 6-48 The resulting voltage boost using a linear characteristic as example The inverter boosts the voltage corresponding to the starting currents p1310 …...
-
Page 238: Sensorless Vector Control With Speed Controller
Advanced commissioning 6.17 Motor control 6.17.2 Sensorless vector control with speed controller 6.17.2.1 Structure of vector control without encoder (sensorless) Overview The vector control comprises closed-loop current control and a higher-level closed-loop speed control. for induction motors Settings that are required Figure 6-49 Simplified function diagram for sensorless vector control with speed controller Using the motor model, the inverter calculates the following closed-loop control signals from... - Page 239 Advanced commissioning 6.17 Motor control frequency also results in a higher motor slip, which is proportional to the accelerating torque. and I controllers keep the motor flux constant using the output voltage, and adjust the matching current component I in the motor. All of the function diagrams 6020 ff.
-
Page 240: Optimizing The Closed-Loop Speed Controller
Advanced commissioning 6.17 Motor control 6.17.2.2 Optimizing the closed-loop speed controller Optimum control response - post optimization not required Preconditions for assessing the controller response: ● The moment of inertia of the load is constant and does not depend on the speed ●... - Page 241 Advanced commissioning 6.17 Motor control ● The inverter requires 10 % … 50 % of the rated torque to accelerate. When necessary, adapt the ramp-up and ramp-down times of the ramp-function generator (p1120 and p1121). ● STARTER and Startdrive have trace functions that allow the speed setpoint and actual value to be recorded.
-
Page 242: Advanced Settings
Advanced commissioning 6.17 Motor control Mastering critical applications The drive control can become unstable for drives with a high load moment of inertia and gearbox backlash or a coupling between the motor and load that can possibly oscillate. In this case, we recommend the following settings: ●... - Page 243 Advanced commissioning 6.17 Motor control Figure 6-50 Effect of droop in the speed controller When droop is active, the ramp-function generators of all of the coupled drives must be set to have identical ramp-up and ramp-down times as well as rounding-off. Par.
-
Page 244: Friction Characteristic
Advanced commissioning 6.17 Motor control Par. Explanation p1610 Static torque setpoint (encoderless) (Factory setting: 50 %) Set a value which is higher than the maximum load torque that occurs. ● When opening the motor holding brake, enter a speed setpoint > 0. For speed setpoint = 0, and with the motor holding brake open, the load drops because the induction motor rotates with the slip frequency as a result of the pulling load. - Page 245 Advanced commissioning 6.17 Motor control Recording a friction characteristic After quick commissioning, the inverter sets the speeds of the intermediate points to values suitable for the rated speed of the motor. The frictional torque of all intermediate points is still equal to zero.
-
Page 246: Moment Of Inertia Estimator
Advanced commissioning 6.17 Motor control Parameter Explanation p3845 Activate friction characteristic plot (factory setting: 0) 0: Friction characteristic plot deactivated 1: Friction characteristic plot activated, both directions 2: Friction characteristic plot activated, positive direction 3: Friction characteristic plot activated, negative direction p3846 Friction characteristic plot ramp-up/ramp-down time (factory setting: 10 s) Ramp-up/ramp-down time for automatic plotting of the friction characteristic. - Page 247 Advanced commissioning 6.17 Motor control Function From the actual speed, the actual motor torque and the frictional torque of the load, the inverter calculates the total moment of inertia of the load and motor. Figure 6-55 Overview of the function of the moment of inertia estimator When using the moment of inertia estimator, we recommend that you also activate the friction characteristic.
- Page 248 Advanced commissioning 6.17 Motor control Calculating the moment of inertia For higher speed changes, the inverter initially calculates the accelerating torque M as differ- ence between the motor torque M , load torque M and frictional torque M Moment of inertia J of the motor and load is obtained from the accelerating torque M angular acceleration α...
- Page 249 Advanced commissioning 6.17 Motor control Example: For a horizontal conveyor, in a first approximation, the moment of inertia depends on the load. The relationship between load torque and torque is saved in the inverter as linear characteristic. In a positive direction of rotation: Moment of inertia J = p5312 ×...
- Page 250 Advanced commissioning 6.17 Motor control The most important settings Parameter Explanation r0333 Rated motor torque [Nm] p0341 Motor moment of inertia (factory setting: 0 kgm The inverter sets the parameter when selecting a listed motor. The parameter is then write-protected. p0342 Moment of inertia ratio, total to motor (factory setting: 1) Ratio of moment of inertia load + motor to moment of inertia of motor without load...
- Page 251 Advanced commissioning 6.17 Motor control Advanced settings Parameter Explanation p1226 Standstill detection, speed threshold (Factory setting: 20 rpm) The moment of inertia estimator only measures the load torque for speeds ≥ p1226. p1226 also defines from which speed the inverter switches-off the motor for OFF1 and OFF3.
-
Page 252: Pole Position Identification
The inverter must measure the pole position for motors not equipped with an encoder, or for encoders, which do not supply the information regarding the pole position. If you are using a Siemens motor, then the inverter automatically selects the appropriate technique to determine the pole position, and when required starts the pole position identification. -
Page 253: Torque Control
Advanced commissioning 6.17 Motor control 6.17.3 Torque control Torque control is part of the vector control and normally receives its setpoint from the speed controller output. By deactivating the speed controller and directly entering the torque setpoint, the closed-loop speed control becomes closed-loop torque control. The inverter then no longer controls the motor speed, but the torque that the motor generates. -
Page 254: Elektrically Braking The Motor
Advanced commissioning 6.18 Elektrically braking the motor Parameter Description p1300 Control mode: 22: Torque control without speed encoder p0300 … Motor data is transferred from the motor type plate during quick commissioning and p0360 calculated with the motor data identification p1511 Additional torque p1520... - Page 255 Advanced commissioning 6.18 Elektrically braking the motor ● Grinding machines ● Conveyor belts DC braking is not permissible in applications involving suspended loads, e.g. lifting equipment/cranes and vertical conveyors. Function NOTICE Motor overheating as a result of DC braking The motor will overheat if you use DC braking too frequently or use it for too long. This may damage the motor.
- Page 256 Advanced commissioning 6.18 Elektrically braking the motor DC braking initiated by a control command Requirement: p1231 = 4 and p1230 = control command, e.g. p1230 = 722.3 (control command via DI 3) Function: 1. The higher-level control issues the command for DC braking, e.g. using DI3: p1230 = 722.3.
-
Page 257: Dynamic Braking
Advanced commissioning 6.18 Elektrically braking the motor Parameter Description p1234 DC braking start speed (factory setting 210000 rpm) r1239 DC braking status word DC braking active DC braking ready DC braking selected DC braking selection internally locked DC braking for OFF1/OFF3 Table 6- 42 Configuring DC braking as a response to faults Parameter... - Page 258 Advanced commissioning 6.18 Elektrically braking the motor Principle of operation The DC link voltage increases as soon as the motor supplies regenerative power to the inverter when braking. The regenerative power means that the DC link voltage in the inverter increases.
- Page 259 Adapt the default setting of the inputs and outputs (Page 143) An application example for configuring a drive with braking resistor is provided in the Internet: Engineering braking chopper (braking resistor) operation (https://support.industry.siemens.com/cs/ww/en/view/22101908) Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 260: Overcurrent Protection
Advanced commissioning 6.19 Overcurrent protection 6.19 Overcurrent protection The vector control ensures that the motor current remains within the set torque limits. If you use U/f control, you cannot set any torque limits. The U/f control prevents too high a motor current by influencing the output frequency and the motor voltage (I-max controller). -
Page 261: Inverter Protection Using Temperature Monitoring
Advanced commissioning 6.20 Inverter protection using temperature monitoring 6.20 Inverter protection using temperature monitoring The inverter temperature is essentially defined by the following effects: ● The ambient temperature ● The ohmic losses increasing with the output current ● Switching losses increasing with the pulse frequency Monitoring types The inverter monitors its temperature using the following monitoring types: ●... - Page 262 Advanced commissioning 6.20 Inverter protection using temperature monitoring If the measure cannot prevent an inverter thermal overload, then the inverter switches off the motor with fault F30024. Overload response for p0290 = 1 The inverter immediately switches off the motor with fault F30024. Overload response for p0290 = 2 We recommend this setting for drives with square-law torque characteristic, e.g.
- Page 263 Advanced commissioning 6.20 Inverter protection using temperature monitoring If it is not possible to temporarily reduce the pulse frequency, or the measure cannot prevent a power unit thermal overload, then the inverter switches off the motor with fault F30024. Overload response for p0290 = 12 The inverter responds in two stages: 1.
-
Page 264: Motor Temperature Monitoring Using A Temperature Sensor
Advanced commissioning 6.21 Motor temperature monitoring using a temperature sensor 6.21 Motor temperature monitoring using a temperature sensor You can use one of the following sensors to protect the motor against overtemperature: ● Temperature switch (e. g. bi-metal switch) ● PTC sensor ●... - Page 265 Advanced commissioning 6.21 Motor temperature monitoring using a temperature sensor Using a KTY sensor, the inverter monitors the motor temperature and the sensor itself for wire-break or short-circuit: ● Temperature monitoring: The inverter uses a KTY sensor to evaluate the motor temperature in the range from -48° C ...
- Page 266 Advanced commissioning 6.21 Motor temperature monitoring using a temperature sensor Pt1000 sensor Using a Pt1000 sensor, the inverter monitors the motor temperature and the sensor itself for wire breakage and/or short-circuit: ● Temperature monitoring: Using a Pt1000 sensor, the inverter evaluates the motor temperature in the range from - 48 °C ...
-
Page 267: Motor Protection By Calculating The Temperature
Advanced commissioning 6.22 Motor protection by calculating the temperature Parameter Description Alarm A07910 and fault F07011 The inverter does not reduce the current limit. p0640 Current limit [A] Additional information on the motor temperature monitoring can be found in function diagram 8016 of the List Manual. - Page 268 Advanced commissioning 6.22 Motor protection by calculating the temperature Parameter Description Alarm A07012 and fault F07011 The inverter does not reduce the current limit. After switching off the supply voltage, the inverter saves the most-recently calcu- lated difference to the ambient air temperature. After switching the supply voltage on again, the thermal motor model starts with 90 % of the previously saved differ- ence temperature.
-
Page 269: Motor And Inverter Protection By Limiting The Voltage
Advanced commissioning 6.23 Motor and inverter protection by limiting the voltage 6.23 Motor and inverter protection by limiting the voltage What causes an excessively high voltage? To drive the load, an electric motor converts electrical energy into mechanical energy. If the motor is driven by its load, e.g. -
Page 270: Monitoring The Driven Load
Advanced commissioning 6.24 Monitoring the driven load Parameter for Vdc_max control The parameters differ depending on the motor control mode. Parameter for Parameter for Description V/f control vector control p1280 = 1 p1240 = 1 VDC controller configuration(factory setting: 1) 1: VDC controller is enabled r1282 r1242... -
Page 271: Rotation Monitoring
Advanced commissioning 6.24 Monitoring the driven load If the motor current for the time p2180 lies below the current level p2179, the inverter signals "output load not available" and alarm A07929. Parameters Description r0068 Actual current value [A] [0] = Unsmoothed [1] = Smoothed with p0045 p2179 Output load detection current limit (Factory setting: 0 A) -
Page 272: Torque Monitoring
Advanced commissioning 6.24 Monitoring the driven load For more information, see the List Manual (the parameter list and function diagram 8013). 6.24.3 Torque monitoring In applications with fans, pumps or compressors with the flow characteristic, the torque follows the speed according to a specific characteristic. An insufficient torque for fans indicates that the power transmission from the motor to the load is interrupted. - Page 273 Advanced commissioning 6.24 Monitoring the driven load Parameters Description p2192 Load monitoring delay time Delay time for the message "Leave torque monitoring tolerance band" p2193 = 1 Load monitoring configuration (factory setting: 1) 1: Monitoring torque and load drop In applications with fans, pumps or compressors with the flow characteristic, the torque follows the speed according to a specific characteristic.
- Page 274 Advanced commissioning 6.24 Monitoring the driven load Parameter Description A07891: Load monitoring, pump/fan blocked A07892: Load monitoring, pump/fan without load A07893: Load monitoring, pump leakage F07894: Load monitoring, pump/fan blocked F07895: Load monitoring, pump/fan without load F07896: Load monitoring, pump leakage p2182 Load monitoring speed threshold 1 The inverter inter-...
-
Page 275: Efficiency Optimization
Advanced commissioning 6.25 Efficiency optimization 6.25 Efficiency optimization Overview The efficiency optimization reduces the motor losses as far as possible. Efficiency optimization functions under the following preconditions: ● Operation with an induction motor ● Vector control is set in the inverter. Active efficiency optimization has the following advantages: ●... - Page 276 Advanced commissioning 6.25 Efficiency optimization Efficiency optimization, method 2 Generally, energy efficiency optimization method 2 achieves a better efficiency than method 1. We recommend that you set method 2. Figure 6-64 Determining the optimum flux from the motor thermal model Based on its thermal motor model, the inverter continually determines - for the actual operating point of the motor - the interdependency between efficiency and flux.
- Page 277 Advanced commissioning 6.25 Efficiency optimization Efficiency optimization, method 1 Figure 6-66 Reduce the flux setpoint in the partial load range of the motor The motor operates in partial load mode between no-load operation and the rated motor torque. Depending on p1580, in the partial load range, the inverter reduces the flux setpoint linearly with the torque.
-
Page 278: Calculating The Energy Saving For Fluid Flow Machines
Advanced commissioning 6.26 Calculating the energy saving for fluid flow machines 6.26 Calculating the energy saving for fluid flow machines Fluid flow machines, which mechnically control the flow rate using valves or throttle flaps, operate with a constant speed corresponding to the line frequency. Figure 6-68 Flow control with pump and throttle connected to a 50 Hz line supply The lower the flow rate, the poorer the efficiency of the fluid flow machine (pump). - Page 279 Advanced commissioning 6.26 Calculating the energy saving for fluid flow machines Parameter Description r0039 Energy display [kWh] Energy balance Energy usage since the last reset Energy drawn since the last reset Energy fed back since the last reset p0040 Reset energy consumption display A signal change 0 →...
-
Page 280: Switchover Between Different Settings
Advanced commissioning 6.27 Switchover between different settings 6.27 Switchover between different settings There are applications that require different inverter settings. Example: You connect different motors to one inverter. Depending on the particular motor, the inverter must operate with the associated motor data and the appropriate ramp-function generator. Drive data sets (DDS) Your can set several inverter functions differently and then switch over between the different settings. - Page 281 Advanced commissioning 6.27 Switchover between different settings Table 6- 46 Parameters for switching the drive data sets: Parameter Description p0820[0…n] Drive data set selection DDS bit 0 If you use several command data sets CDS, then you must set this parameter p0821[0…n] Drive data set selection DDS bit 1 for each CDS.
- Page 282 Advanced commissioning 6.27 Switchover between different settings Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 283: Data Backup And Series Commissioning
Data backup and series commissioning Saving settings outside the inverter After commissioning, your settings are saved in the inverter so that they are protected against power failure. We recommend that you additionally back up the settings on a storage medium outside the inverter. -
Page 284: Backing Up And Transferring Settings Using Memory Card
Data backup and series commissioning 7.1 Backing up and transferring settings using memory card Backing up and transferring settings using memory card Using memory cards from other manufacturers The inverter only supports memory cards up to 2 GB. SDHC cards (SD High Capacity) and SDXC cards (SD Extended Capacity) are not permitted. - Page 285 Data backup and series commissioning 7.1 Backing up and transferring settings using memory card Automatic upload The inverter power supply has been switched off. 1. Insert an empty memory card into the card reader of the Power Module. 2. Fit the Power Module to the Terminal Housing - making sure that the seals are fitted correctly and the correct tighten torque (2.0 Nm) is used to ensure the IP rating of the Inverter.
-
Page 286: Transferring The Settings From The Memory Card
Data backup and series commissioning 7.1 Backing up and transferring settings using memory card 3. In your drive, select "Drive Navigator". 4. Select the "Commissioning" button. 5. Select the button to transfer the settings to the memory card. 6. Select the settings as shown in the diagram and start the data backup. 7. -
Page 287: Manually Transferring The Settings From The Memory Card
Data backup and series commissioning 7.1 Backing up and transferring settings using memory card 3. Ensure the application under the control of the converter is in a safe state. 4. Remove the Power Module from the Terminal Housing. 5. Insert the memory card, containing the parameter set data into the memory card reader. 6. - Page 288 Data backup and series commissioning 7.1 Backing up and transferring settings using memory card 4. Select the settings as shown in the diagram and start the data backup. 5. Wait until STARTER signals that the data backup has been completed. 6.
-
Page 289: Safely Remove The Memory Card
Data backup and series commissioning 7.1 Backing up and transferring settings using memory card 7.1.4 Safely remove the memory card CAUTION Possible corruption of memory card data The files system on the memory card can be destroyed if the memory card is removed while the Inverter is powered-up without using the "safe removal"... - Page 290 Data backup and series commissioning 7.1 Backing up and transferring settings using memory card Procedure with STARTER To safely remove the memory card, proceed as follows: 1. Go online. 2. In the Drive Navigatorselect the following screen form: 3. Click on the button to safely remove the memory card. STARTER will tell you whether you can remove the memory card from the inverter.
-
Page 291: Activate Message For A Memory Card That Is Not Inserted
Safely remove memory card status 1 signal: Memory card inserted 1 signal: Memory card activated 1 signal: SIEMENS memory card 1 signal: Memory card used as USB data storage medium from the PC Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH... -
Page 292: Backing Up And Transferring Settings Via Starter
Data backup and series commissioning 7.2 Backing up and transferring settings via STARTER Backing up and transferring settings via STARTER With the supply voltage switched on, you can transfer the converter settings from the converter to a PG/PC, or the data from a PG/PC to the converter. -
Page 293: Other Ways To Back Up Settings
On the memory card, you can back up 99 other settings in addition to the default setting. Additional information is available in the Internet: Memory options (http://support.automation.siemens.com/WW/view/en/43512514). Write protection The write protection prevents unauthorized changing of the inverter settings. If you are working with a PC tool, such as STARTER, then write protection is only effective online. - Page 294 Data backup and series commissioning 7.4 Write protection Activate and deactivate write protection Procedure with STARTER Proceed as follows to activate or deactivate the write protection: 1. Go online. 2. Open the shortcut menu of the required inverter. 3. Activate or deactivate write protection.
-
Page 295: Know-How Protection
Setting options for know-how protection Know-how protection without copy protection is possible with or without memory card Know-how protection with copy protection is only possible with a Siemens memory card. Replacing a Control Module with active know-how protection (Page 327) Know-how protection without copy protection The inverter can be operated with or without memory card. - Page 296 Data backup and series commissioning 7.5 Know-how protection ● STARTER does not display any screen forms. ● Adjustable parameters cannot be changed using commissioning tools, e.g. an operator panel or Startdrive. When know-how protection is active, support can only be provided (from Technical Support) after prior agreement from the machine manufacturer (OEM).
-
Page 297: Extending The Exception List For Know-How Protection
Data backup and series commissioning 7.5 Know-how protection Commissioning know-how protection Maintain the following sequence: 1. Check as to whether you must extend the exception list. List of exceptions (Page 297) 2. Activate the know-how protection. Know-how protection (Page 298) 7.5.1 Extending the exception list for know-how protection In the factory setting, the exception list only includes the password for know-how protection. -
Page 298: Activating And Deactivating Know-How Protection
Data backup and series commissioning 7.5 Know-how protection Parameter Parameter Description p7763 KHP OEM exception list number of indices for p7764 (factory setting 1) p7764 KHP OEM exception list (factory setting [0] 7766, [1 …499 ] 0) p7766 is the password for know-how protection 7.5.2 Activating and deactivating know-how protection Activating know-how protection... - Page 299 Data backup and series commissioning 7.5 Know-how protection 4. The "Without copy protection" option is active by default. If an appropriate memory card is inserted in the Control Unit, you can select one of two copy protection options: – With basic copy protection (permanently linked to the memory card) –...
- Page 300 Data backup and series commissioning 7.5 Know-how protection Deactivating know-how protection, deleting a password Procedure with STARTER Proceed as follows to deactivate know-how protection: 1. Go online with STARTER. 2. Select the required inverter in the project. 3. Using the right-hand mouse key, open the dialog window "Know-how protection drive unit →...
- Page 301 Data backup and series commissioning 7.5 Know-how protection Parameter Description p7766[0...29] KHP password input p7767[0...29] KHP password new p7768[0...29] KHP password confirmation p7769[0...20] KHP memory card reference serial number r7843[0...20] Memory card serial number Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
- Page 302 Data backup and series commissioning 7.5 Know-how protection Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 303: Alarms, Faults And System Messages
Alarms, faults and system messages Status LED overview LED status indicators The Power Module has number of dual-colour LEDs which are designed to indicate the operational state of the Inverter. The LEDs are used to indicate the status of the following states: ●... -
Page 304: Operating States Indicated On Leds
Alarms, faults and system messages 8.2 Operating states indicated on LEDs Operating states indicated on LEDs Table 8- 1 Explanation of symbols for the following tables LED is ON LED is OFF LED flashes slowly LED flashes quickly LED flashes with variable frequency Please contact Technical Support for LED states that are not described in the following. - Page 305 Alarms, faults and system messages 8.2 Operating states indicated on LEDs Table 8- 3 Integrated safety functions SAFE Explanation One or more safety functions are enabled, but not active. One or more safety functions are active and error-free. The inverter has detected a safety function fault and initiated a stop response. Table 8- 4 PROFINET fieldbus Explanation...
-
Page 306: System Runtime
Alarms, faults and system messages 8.3 System runtime Table 8- 6 Fieldbus AS-i AS-i / Explanation System OK AS-i master not connected No communications between processors within the converter Slave address 0 Converter trip System runtime By evaluating the system runtime of the inverter, you can decide whether you must replace components subject to wear such as fans, motors and gear units. -
Page 307: Identification & Maintenance Data (I&M)
Format Example for the Valid for Valid for content PROFINET PROFIBUS Manufacturer-specific u8[10] 00 … 00 hex ✓ MANUFACTURER_ID 42d hex ✓ ✓ (=Siemens) ORDER_ID Visible String „6SL3246-0BA22- ✓ ✓ [20] 1FA0“ SERIAL_NUMBER Visible String „T-R32015957“ ✓ ✓ [16] HARDWARE_REVISION 0001 hex ✓... -
Page 308: Alarms, Alarm Buffer, And Alarm History
Alarms, faults and system messages 8.5 Alarms, alarm buffer, and alarm history Alarms, alarm buffer, and alarm history Alarms Alarms have the following properties: ● Incoming alarms have no direct influence on the inverter. ● Alarms disappear again when the cause is eliminated. ●... - Page 309 Alarms, faults and system messages 8.5 Alarms, alarm buffer, and alarm history Alarm history Figure 8-3 Shifting removed alarms into the alarm history If the alarm buffer is completely filled and an additional alarm occurs, the inverter shifts all removed alarms into the alarm history. The following occurs in detail: 1.
- Page 310 Alarms, faults and system messages 8.5 Alarms, alarm buffer, and alarm history Parameter Description r2123 Alarm time received in milliseconds Displays the time in milliseconds when the alarm occurred r2124 Alarm value Displays additional information about the alarm r2125 Alarm time removed in milliseconds Displays the time in milliseconds when the alarm was removed r2145 Alarm time received in days...
-
Page 311: Faults, Alarm Buffer And Alarm History
Alarms, faults and system messages 8.6 Faults, alarm buffer and alarm history Faults, alarm buffer and alarm history Faults Faults have the following properties: ● In general, a fault leads to the motor being switched off. ● A fault must be acknowledged. ●... - Page 312 Alarms, faults and system messages 8.6 Faults, alarm buffer and alarm history Acknowledge fault To acknowledge a fault, you have the following options: ● PROFIdrive control word 1, bit 7 (r2090.7) ● Acknowledging via a digital input ● Acknowledge via the Operator Panel ●...
- Page 313 Alarms, faults and system messages 8.6 Faults, alarm buffer and alarm history Parameters of the fault buffer and the fault history Parameter Description r0945 Fault code Displays the numbers of the faults that have occurred r0948 Fault time received in milliseconds Displays the time in milliseconds when the fault occurred r0949 Fault value...
-
Page 314: List Of Alarms And Faults
Alarms, faults and system messages 8.7 List of alarms and faults Parameter Description p2126[0 … 19] Setting the fault number for the acknowledgement mode Selection of the faults for which the acknowledgement type should be changed. You can modify the acknowledgement type for up to 20 different fault codes. p2127[0 …... - Page 315 Alarms, faults and system messages 8.7 List of alarms and faults Table 8- 7 The most important alarms and faults Number Cause Remedy F01000 Software fault in CU Replace CU. F01001 Floating Point Exception Switch CU off and on again. F01015 Software fault in CU Upgrade firmware or contact technical support.
- Page 316 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy A01910 Setpoint timeout The alarm is generated when p2040 ≠ 0 ms and one of the F01910 following causes is present: The bus connection is interrupted •...
- Page 317 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy F07320 Automatic restart aborted Increase the number of restart attempts (p1211). The actual number of start attempts is shown in r1214. Increase the wait time in p1212 and/or monitoring time in p1213.
- Page 318 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy F07806 Regenerative power limit Increase deceleration ramp. exceeded Reduce driving load. Use power unit with higher energy recovery capability. For vector control, the regenerative power limit in p1531 can be reduced until the fault is no longer activated.
- Page 319 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy A07981 No enabling for rotary Acknowledge pending faults. measurement Establish missing enables (see r00002, r0046). A07991 Motor data identification Switch on the motor and identify the motor data. activated F08501 Setpoint timeout...
- Page 320 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy F30001 Overcurrent Check the following: Motor data, if required, carry out commissioning • Motor connection method (Υ / Δ) • U/f operation: Assignment of rated currents of motor •...
- Page 321 Alarms, faults and system messages 8.7 List of alarms and faults Number Cause Remedy F30027 Time monitoring for DC link Check the supply voltage at the input terminals. pre-charging Check the line voltage setting (p0210). F30035 Overtemperature, intake air • Check whether the fan is running.
- Page 322 Alarms, faults and system messages 8.7 List of alarms and faults Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 323: Service And Maintenance
Service and maintenance Spare parts compatibility Continuous development within the scope of product maintenance Inverter components are being continuously developed within the scope of product maintenance. Product maintenance includes, for example, measures to increase the ruggedness or hardware changes which become necessary as components are discontinued. -
Page 324: Overview Of Replacing Converter Components
• Only commission the following persons to repair the inverter: – Siemens customer service – A repair center that has been authorized by Siemens – Specialist personnel who are thoroughly acquainted with all the warnings and operating procedures contained in this manual. - Page 325 SIMATIC S7 control with DriveES – using DriveES. Details of the device replacement without removable storage medium can be found in the Profinet system description (http://support.automation.siemens.com/WW/view/en/19292127). Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 326: Replacing The Control Module
No Hot-swap of components The components of the SINAMICS G110M system cannot be swapped, installed or removed without securing any loads controlled by the application, removing the power supply from the system and waiting 5 minutes to allow the electrical components of the system to fully discharge. -
Page 327: Replacing A Control Module With Active Know-How Protection
If the inverter settings can neither be copied nor forwarded, a recommissioning is required after inverter replacement. To avoid the recommissioning, you must use a Siemens memory card, and the machine manufacturer must have an identical prototype machine that it uses as sample. - Page 328 Service and maintenance 9.2 Replacing converter components Option 1: The machine manufacturer only knows the serial number of the new inverter 1. The end customer provides the machine manufacturer with the following information: – For which machine must the inverter be replaced? –...
- Page 329 – Send the encrypted project to the end customer, e.g. via e-mail. 3. The end customer copies the project to the Siemens memory card that belongs to the machine, inserts it in the inverter and switches on the power supply for the inverter.
-
Page 330: Replacing The Power Module
No Hot-swap of components The components of the SINAMICS G110M system cannot be swapped, installed or removed without securing any loads controlled by the application, removing the power supply from the system and waiting 5 minutes to allow the electrical components of the system to fully discharge. -
Page 331: Correcting A Failed Firmware Upgrade Or Downgrade
Service and maintenance 9.3 Correcting a failed firmware upgrade or downgrade Correcting a failed firmware upgrade or downgrade How does the inverter report a failed upgrade or downgrade? The inverter signals a failed firmware upgrade or down- grade with a quickly flashing RDY LED and a lit up BF LED. -
Page 332: Firmware Upgrade And Downgrade
Proceed as follows to prepare a memory card for the firmware upgrade or downgrade: 1. Download the required firmware to your PC from the Internet. Download (https://support.industry.siemens.com/cs/ww/en/view/67364620) 2. Extract the files to a directory of your choice on your PC. - Page 333 Service and maintenance 9.4 Firmware upgrade and downgrade Overview of firmware upgrades and downgrades User actions Inverter response Figure 9-2 Overview of the firmware upgrade and firmware downgrade Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 334: Upgrading Firmware
Service and maintenance 9.4 Firmware upgrade and downgrade 9.4.1 Upgrading firmware When upgrading firmware you replace the inverter's firmware with a newer version. Only update the firmware to a newer version if you require the expanded range of functions of that newer version. - Page 335 Service and maintenance 9.4 Firmware upgrade and downgrade 7. Once the transfer is completed, the RDY and BF LEDs flash slowly red (0.5 Hz). Note Damaged firmware due to a supply voltage interruption during transfer If the power supply fails during the transfer, this can damage the inverter's firmware. •...
-
Page 336: Firmware Downgrade
Service and maintenance 9.4 Firmware upgrade and downgrade 9.4.2 Firmware downgrade When downgrading firmware you replace the inverter's firmware with an older version. Only update the firmware to an older level if, after replacing a inverter, you require the same firmware in all inverters. - Page 337 Service and maintenance 9.4 Firmware upgrade and downgrade 6. The inverter transfers the firmware from the memory card into its memory. The transfer takes between 5 and 10 minutes. While data is being transferred, the LED RDY on the inverter stays red. The BF LED flashes orange with a variable frequency.
- Page 338 Service and maintenance 9.4 Firmware upgrade and downgrade 13.If the firmware downgrade was successful, after several seconds the inverter LED RDY turns green. Following the firmware downgrade the inverter is reset to factory settings. 14.Take your settings over from your data backup to the inverter. Data backup and series commissioning (Page 283).
-
Page 339: Technical Data
Technical data 10.1 Performance ratings of the Control Module - CU240M Feature Specification Operating voltage 24 V DC External supply 24 V DC ± 15% Setpoint resolution 0.01 Hz digital; 0.01 Hz serial Digital inputs 4 programmable digital inputs Voltage: ≤ 30 V •... -
Page 340: Performance Ratings Power Module - Pm240M
Technical data 10.2 Performance ratings Power Module - PM240M 10.2 Performance ratings Power Module - PM240M General performance ratings Feature Specification Line operating voltage & 3 AC 380 V (- 10%) … 480 V (+ 10%) power ranges High Overload: 0.37 kW … 4.0 kW (0.5 hp … 5.0 hp) Input frequency 47 Hz …... -
Page 341: Sinamics G110M Specifications
Technical data 10.3 SINAMICS G110M specifications 10.3 SINAMICS G110M specifications Power-dependent performance ratings Note UL certified Fuses must be used UL certified Fuses must be used" it should state "In order that the system is in compliance with UL requirements, UL listed class J fuses must be used. The fuse rating of these fuses... - Page 342 Technical data 10.3 SINAMICS G110M specifications Article No. 6SL3517-… …1BE14-3AM0 Power losses 0.04 kW Required cooling air flow 4.8 l/s Cross section of line and motor cable 1 … 2.5 mm 18 … 14 AWG Tightening torque for line and motor cable 0.5 Nm / 4 lbf in...
-
Page 343: Ambient Operating Temperature
Relative air humidity for the SINAMICS G110M is ≤ 95 % non-condensing. Shock and vibration Do not drop the SINAMICS G110M or expose to sudden shock. Do not install the SINAMICS G110M in an area where it is likely to be exposed to constant vibration. -
Page 344: Current Derating - Depending On The Installation Altitude
Technical data 10.5 Current derating - depending on the installation altitude 10.5 Current derating - depending on the installation altitude Current derating depending on the installation altitude The permissible inverter output current is reduced above an installation altitude of 1000 m. Permissible current as a function of the installation altitude and ambient temperature For installation altitudes above 1000 m, to a certain extent, you can compensate the permissible current using the ambient temperature. -
Page 345: Pulse Frequency And Current Reduction
Technical data 10.6 Pulse frequency and current reduction The derating curve in relationship to the input current from the converter is shown in the following diagram. 10.6 Pulse frequency and current reduction Relationship between pulse frequency and output base-load current reduction Table 10- 5 Current reduction depending on pulse frequency Rated power... - Page 346 Technical data 10.6 Pulse frequency and current reduction Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
-
Page 347: Appendix
A PM240-2 Power Module is required to operate a 1FP1 synchronous- reluctance motor with SINAMICS G120 Support of 1FP3 synchronous-reluctance motors ✓ A PM240-2 Power Module is required to operate a 1FP3 synchronous- reluctance motor along with a selective release from SIEMENS Support of 1LE5 induction motors ✓ ✓ ✓... - Page 348 Appendix A.1 New and extended functions Function SINAMICS G120 G120D Setting option for two output reactors using parameter p0235 at the ✓ ✓ ✓ ✓ ✓ SINAMICS G120C and SINAMICS G120 with PM240-2 FSD … FSF Power Module Efficiency-optimized operation of induction motors ✓...
- Page 349 Appendix A.1 New and extended functions Table A- 2 New functions and function changes in firmware 4.7 SP6 Function SINAMICS G120 G120D Support for the Power Module PM240-2, FSF frame sizes ✓ ✓ ✓ ✓ Support of PM240P-2 Power Modules frame sizes FSD … FSF ✓...
-
Page 350: Firmware Version 4.7 Sp3
Appendix A.1 New and extended functions A.1.2 Firmware version 4.7 SP3 Table A- 3 New functions and function changes in firmware 4.7 SP3 Function SINAMICS G120 G120D PM240-2 Power Modules, frame sizes FSD and FSE are supported ✓ ✓ ✓ ✓... - Page 351 Appendix A.1 New and extended functions Function SINAMICS G120 G120D Moment of inertia estimator with moment of inertia precontrol to optimize ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓ the speed controller in operation Friction torque characteristic with automatic plotting to optimize the speed ✓...
- Page 352 Appendix A.1 New and extended functions Function SINAMICS G120 G120D Default of the minimum speed to 20% of the rated motor speed ✓ For commissioning with an operator panel, the inverter automatically ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓...
-
Page 353: Firmware Version 4.7
Appendix A.1 New and extended functions A.1.3 Firmware version 4.7 Table A- 4 New functions and function changes in Firmware 4.7 Function SINAMICS G120 G120D Supporting the identification & maintenance datasets (I&M1 … 4) ✓ ✓ ✓ ✓ ✓ ✓ ✓... -
Page 354: Firmware Version 4.6 Sp6
Appendix A.1 New and extended functions A.1.4 Firmware version 4.6 SP6 Table A- 5 New functions and function changes in firmware 4.6 SP6 Function SINAMICS G120 G120D Support for the new Power Modules ✓ PM330 IP20 GX • Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH... -
Page 355: Firmware Version 4.6
Appendix A.1 New and extended functions A.1.5 Firmware version 4.6 Table A- 6 New functions and function changes in Firmware 4.6 Function SINAMICS G120 G120D Support for the new Power Modules ✓ ✓ ✓ ✓ PM240-2 IP20 FSB … FSC •... -
Page 356: The Device Trace In Starter
Appendix A.2 The device trace in STARTER The device trace in STARTER Description The device trace graphically displays inverter signals with respect to time. Signals In two settings that are independent of one another, using you can interconnect eight signals each. Recording You can start a measurement as frequently as you require. - Page 357 Appendix A.2 The device trace in STARTER If you require more than two settings for your measurements, you can either save the individual settings in the project or export them in *.clg format, and load or import them, if necessary. You can record individual bits of a parameter (e.g.
- Page 358 Appendix A.2 The device trace in STARTER ① Select the bits for the trace trigger, upper row hex format, lower row binary format ② Define the bits for the trace trigger, upper row hex format, lower row binary format Figure A-1 Trigger as bit pattern of r0722 (status of the digital inputs) In the example, the trace starts if digital inputs DI 0 and DI 3 are high, and DI 2 is low.
-
Page 359: Interconnecting Signals In The Inverter
Appendix A.3 Interconnecting signals in the inverter Interconnecting signals in the inverter A.3.1 Fundamentals The following functions are implemented in the inverter: ● Open-loop and closed-loop control functions ● Communication functions ● Diagnosis and operating functions Every function comprises one or several blocks that are interconnected with one another. Figure A-2 Example of a block: Motorized potentiometer (MOP) Most of the blocks can be adapted to specific applications using parameters. - Page 360 Appendix A.3 Interconnecting signals in the inverter Binectors and connectors Connectors and binectors are used to exchange signals between the individual blocks: ● Connectors are used to interconnect "analog" signals (e.g. MOP output speed) ● Binectors are used to interconnect digital signals (e.g. "Enable MOP up" command) Figure A-4 Symbols for binector and connector inputs and outputs Binector/connector outputs (CO/BO) are parameters that combine more than one binector...
-
Page 361: Application Example
Appendix A.3 Interconnecting signals in the inverter Where can you find additional information? ● This manual suffices for assigning a different meaning to the digital inputs. ● The parameter list in the List Manual is sufficient for more complex signal interconnections. - Page 362 Appendix A.3 Interconnecting signals in the inverter Parameter Description p20033 = 440 Run sequence of the AND logic block within runtime group 5 (processing after the time block) p20159 = 5000.00 Setting the delay time [ms] of the time module: 5 seconds p20158 = 722.0 Connect the status of DI 0 to the input of the time block r0722.0 = Parameter that displays the status of digital input 0.
-
Page 363: Acceptance Tests For The Safety Functions
Appendix A.4 Acceptance tests for the safety functions Acceptance tests for the safety functions A.4.1 Recommended acceptance test The following descriptions for the acceptance test are recommendations that illustrate the principle of acceptance. You may deviate from these recommendations if you check the following once you have completed commissioning: ●... -
Page 364: Acceptance Test Sto (Basic Functions)
Appendix A.4 Acceptance tests for the safety functions A.4.2 Acceptance test STO (basic functions) Figure A-7 Acceptance test for STO (basic functions) Procedure To perform an acceptance test of the STO function as part of the basic functions, proceed as follows: Status The inverter is ready... - Page 365 Appendix A.4 Acceptance tests for the safety functions Status When controlled via When controlled via fail- When controlled via PROFIsafe safe digital inputs (F-DI) terminals STO_A and STO_B on Power Mod- ule PM240M The inverter signals The inverter signals The inverter signals •...
-
Page 366: Machine Documentation
Appendix A.4 Acceptance tests for the safety functions A.4.3 Machine documentation Machine or plant description Designation Type Serial number Manufacturer End customer Overview diagram of the machine and/or system: Inverter data The inverter data include the hardware version of the safety-relevant inverter. Labeling the drive Article number and hardware version of the inverter Function table... - Page 367 Appendix A.4 Acceptance tests for the safety functions Acceptance test reports File name of the acceptance reports Data backup Data Storage medium Holding area Archiving type Designation Date Acceptance test reports PLC program Circuit diagrams Countersignatures Commissioning engineer The commissioning engineer confirms that the tests and checks listed above have been correctly executed.
-
Page 368: Documenting The Settings For The Basic Functions, Firmware V4.4
Appendix A.4 Acceptance tests for the safety functions A.4.4 Documenting the settings for the basic functions, firmware V4.4 ... V4.7 SP6 Drive = <pDO-NAME_v> Table A- 8 Firmware version Name Number Value Control Unit firmware version <r18_v> SI version, safety functions integrated in the drive (processor 1) r9770 <r9770_v>... -
Page 369: Electromagnetic Compatibility
SI change control time stamp r9782[1] <r9782[1]_v> Electromagnetic Compatibility The SINAMICS G110M drives have been tested in accordance with the EMC Product Standard EN 61800-3:2004. Details see declaration of conformity Note Install all drives in accordance with the manufacturer’s guidelines and in accordance with good EMC practices. - Page 370 Appendix A.5 Electromagnetic Compatibility Table A- 14 Conducted disturbance voltage and radiated emissions EMC Phenomenon Converter type Level acc. to Remark IEC 61800-3 Conducted emissions All converters with integrated class A filters. Category C2 (disturbance voltage) First Environment - Article number: Professional Use 6SL3517-1BE**-*A** Radiated emissions...
- Page 371 Appendix A.5 Electromagnetic Compatibility EMC Immunity The SINAMICS G110M drives have been tested in accordance with the immunity requirements of category C3 (industrial) environment: Table A- 16 EMC Immunity EMC Phenomenon Standard Level Performance Criterion Electrostatic Discharge (ESD) EN 61000-4-2...
-
Page 372: Manuals And Technical Support
Manuals for your converter Manuals with additional information that can be downloaded: ● Getting Started Guide (http://support.automation.siemens.com/WW/view/en/84182041/133300) Installing and commissioning the converter. ● Operating instructions (https://support.industry.siemens.com/cs/ww/en/view/102316337) Installing, commissioning and maintaining the inverter. Advanced commissioning (this manual) ● Function Manual for Safety Integrated (https://support.industry.siemens.com/cs/ww/en/view/109477367) Configuring PROFIsafe. -
Page 373: Configuring Support
Catalog Ordering data and technical information for SINAMICS G inverters. Catalogs for download or online catalog (Industry Mall): Everything about SINAMICS G110M (www.siemens.com/sinamics-g110m) SIZER The configuration tool for SINAMICS, MICROMASTER and DYNAVERT T drives, motor starters, as well as SINUMERIK, SIMOTION controllers and SIMATIC technology... -
Page 374: Product Support
A.7 Mistakes and improvements EMC Guidelines configuration manual EMC-compliant control cabinet design, potential equalization and cable routing EMC installation guideline (http://support.automation.siemens.com/WW/view/en/60612658) Safety Integrated for novices technical overview Application examples for SINAMICS G drives with Safety Integrated Safety Integrated for novices (https://support.industry.siemens.com/cs/ww/en/view/80561520) -
Page 375: Index
Index Binectors, 360 Bit pattern test, 203 Block, 359 Braking functions, 254 24 V PSU, 59 Braking method, 254 Braking module, 257 Braking resistor, 257 87 Hz characteristic, 79, 79 Cable protection, 79 Catalog, 373 Acceptance test, 210, 210 Category C2, 370 Complete, 210 CDS (Command Data Set), 183, 208, 209 Reduced scope of, 211... - Page 376 Index Crane, 186 Current reduction, 345 Factory pre-assignment, 82 Cyclic communication, 152 Factory settings, 134 Restore to, 136 Restoring the, 134, 135, 137 Fan, 110 Daisy chain, 80 Fans, 131, 262 Data backup, 283, 286, 292, 367 Fault, 311 Data set 47 (DS), 165 Acknowledge, 311, 312 Data set changeover, 208, 209 Fault buffer, 311...
- Page 377 Index Hoisting gear, 110, 186, 257 Holding brake, 254 Machine description, 366 Horizontal conveyor, 110 Macro p15, 105 Horizontal conveyors, 257, 263 Main entry, 60 Hotline, 374 Main screen form (basic functions), 200, 200 Humidity range, 343 Manual Collection, 372 Manual mode, 183 Manuals Download, 372...
- Page 378 Index Optimizing the closed-loop speed controller, 240 Optional 24 V PSU, 59 Questions, 374 Output frequency, 340 Quick stop, 142 Overload, 260 Quick Stop function, 180 Overload capability, 340 Overview Manuals, 372 Section, 24 Overvoltage, 269, 269 Ramp-down time, 225, 227 Scaling, 227 Ramp-function generator, 220, 223 Rampup time,...
- Page 379 Index Slip compensation, 233 System runtime, 306 Speed Limiting, 220 Speed control, 238 Square-law characteristic, 235 Technology controller, 155, 191, 228 Standards Telegram EN 60146-1-1, 371 Extending, 163 EN 61000-2-4, 371, 371, 371 Temperature, 343 EN 61000-4-11, 371 Temperature calculation, 267 EN 61000-4-2, 371 Temperature monitoring, 261, 267 EN 61000-4-3, 371...
- Page 380 Index Distributed converter for SIMOGEAR geared motors Operating Instructions, 09/2017, FW V4.7.9, A5E31298649B AH...
Need help?
Do you have a question about the Sinamics G110M and is the answer not in the manual?
Questions and answers