Universal Robots E Series Original Instructions Manual
Hide thumbs
Also See for E Series:
- Service manual (205 pages) ,
- Original instructions manual (199 pages) ,
- User manual (248 pages)
Table of Contents
Advertisement
Advertisement
Table of Contents

Related Manuals for Universal Robots E Series












Summary of Contents for Universal Robots E Series
- Page 1 Universal Robots e-Series User Manual UR5e Original instructions (en)
- Page 2 UR5e User Manual...
- Page 3 The information contained herein is the property of Universal Robots A/S and shall not be reproduced in whole or in part without prior written approval of Universal Robots A/S. The information herein is subject to change without notice and should not be construed as a commitment by Universal Robots A/S.
- Page 4 UR5e User Manual...
-
Page 5: Table Of Contents
Contents 1. Preface 1.1. What Do the Boxes Contain 1.2. Important Safety Notice 1.3. How to Read This Manual 1.4. Where to Find More Information 1.4.1. UR+ 1.4.2. UR Forums Part I Hardware Installation Manual 2. Safety 2.1. Introduction 2.2. Validity and Responsibility 2.3. - Page 6 6. Electrical Interface 6.1. Introduction 6.1.1. Control Box Bracket 6.2. Ethernet 6.3. Electrical Warnings and Cautions 6.4. Controller I/O 6.4.1. Common specifications for all digital I/O 6.4.2. Safety I/O 6.4.3. General purpose digital I/O 6.4.4. Digital Inputs from a button 6.4.5. Communication with other machines or PLCs 6.4.6.
- Page 7 9. Certifications 10. Warranties 10.1. Product Warranty 10.2. Disclaimer 11. Stopping Time and Stopping Distance 12. Declarations and Certificates 13. Certificates 14. Applied Standards 15. Technical Specifications 16. Safety Functions Tables 16.1. Table 1 16.2. Table 2 Part II PolyScope Manual 17. Introduction 17.1. Robot Arm Basics 17.2. PolyScope Basics 17.2.1.
- Page 8 18.1.1. Using the Freedrive Button 18.1.2. Using the Freedrive Button on the Move Tab Screen 18.2. Enabling Freedrive: 3PE Teach Pendant 19. Backdrive 19.1. Enabling Backdrive: Standard Teach Pendant 19.2. Enabling Backdrive: 3PE Teach Pendant 20. Operational Mode Selection 20.1. Operational Modes 20.2.
- Page 9 21.16. I/O 21.16.1. Input Signals 21.16.2. Output Signals 21.16.3. OSSD Safety Signals 21.17. Hardware 21.17.1. Selecting Available Hardware 21.18. Safe Home Position 21.18.1. Syncing from Home 21.19. Safe Home Output 21.19.1. Defining Safe Home Output 21.20. Edit Safe Home 21.20.1. Editing Safe Home 22. Run Tab 22.1.
- Page 10 23.5.1. Using Play from Selection 23.6. Using Breakpoints in a Program 23.7. Single Step in a Program 23.8. Command Tab 23.9. Graphics Tab 23.10. Variables Tab 23.11. Basic Program Nodes 23.11.1. Move 23.11.2. Fixed Waypoint 23.11.3. Relative Waypoint 23.11.4. Variable Waypoint 23.11.5.
- Page 11 23.13.5. Speed limits 23.13.6. Test force settings 23.13.7. Conveyor Tracking 23.13.8. Screwdriving 23.13.9. Screwdrive Until 23.14. URCaps 23.14.1. Remote TCP and Toolpath URCap 23.14.2. Remote TCP Movement Types 23.14.3. Remote TCP Waypoint 23.14.4. Remote TCP Toolpath 23.14.5. Remote TCP 23.14.6. Remote TCP PCS 23.14.7.
- Page 12 24.10. Tool Analog Inputs 24.10.1. Tool Communication Interface 24.10.2. Configuring the Tool Communication Interface (TCI) 24.11. Digital Output Mode 24.11.1. Dual Pin Power 24.12. Smooth Transition Between Safety Modes 24.12.1. Adjusting Acceleration/Deceleration Settings 24.13. Home 24.13.1. Defining Home 24.14. Conveyor Tracking Setup 24.14.1.
- Page 13 24.19.9. Set signal address 24.19.10. Set signal name 24.19.11. Signal value 24.19.12. Signal connectivity status 24.19.13. Show Advanced Options 24.19.14. Advanced Options 24.20. EtherNet/IP 25. Move Tab 25.1. Move Tool 25.2. Robot 25.2.1. Feature 25.2.2. Active TCP 25.2.3. Home 25.2.4. Freedrive 25.2.5.
- Page 14 29.3.1. Preferences 29.3.2. Password 29.4. System 29.4.1. Backup and Restore 29.4.2. Update 29.4.3. Network 29.4.4. Managing URCaps 29.4.5. Remote Control 29.4.6. Security Running magic files Configure Inbound Connections Authentication Managing Authorized Keys 29.5. Shutdown Robot 30. Glossary 30.1. Index UR5e User Manual...
-
Page 15: Preface
1. Preface 1. Preface Congratulations on the purchase of your new Universal Robots e-Series robot. The robot can be programmed to move a tool, and communicate with other machines using electrical signals. It is an arm composed of extruded aluminium tubes and joints. -
Page 16: What Do The Boxes Contain
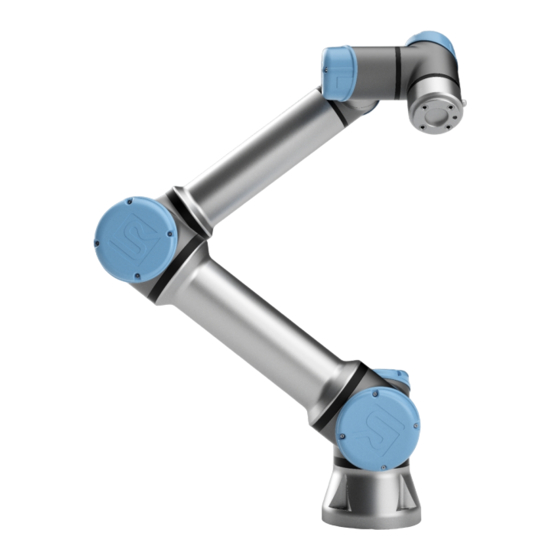
2.1: The joints, the base and the tool flange of the Robot Arm. With six joints and a wide scope of flexibility, Universal Robots e-Series collaborative robot arms are designed to mimic the range of motion of a human arm. Using our patented programming interface, PolyScope, it is easy to program the robot to move tools and communicate with other machines using electrical signals. -
Page 17: Important Safety Notice
1. Preface 1.2. Important Safety Notice The robot is partly completed machinery (see ) and as such a risk assessment is required for each installation of the robot. You must follow all of the safety instructions in chapter 2. Safety on page 7. 1.3. How to Read This Manual This manual contains instructions for installing and programming the robot. - Page 18 1. Preface UR5e User Manual...
-
Page 19: Part I Hardware Installation Manual
Part I Hardware Installation Manual Part I Hardware Installation Manual User Manual UR5e... - Page 20 Part I Hardware Installation Manual UR5e User Manual...
-
Page 21: Safety
This chapter contains important safety information, which must be read and understood by the integrator of Universal Robots e-Series robots before the robot is powered on for the first time. In this chapter, the first subsections are general. The later subsections contain specific engineering data relevant to enable setting up and programming the robot. -
Page 22: Limitation Of Liability
2. Safety • Ensuring that the user will not modify any safety measures • Validating that the total robot system is designed and installed correctly • Specifying instructions for use • Marking the robot installation with relevant signs and contact information of the integrator •... -
Page 23: General Warnings And Cautions
2. Safety WARNING This indicates a potentially hazardous hot surface which, if touched, could result in injury. CAUTION This indicates a situation which, if not avoided, could result in damage to the equipment. 2.5. General Warnings and Cautions This section contains some general warnings and cautions that can be repeated or explained in different parts of this manual. - Page 24 2. Safety WARNING 1. Make sure the robot arm and tool/end effector are properly and securely bolted in place. 2. Make sure the robot arm has ample space to operate freely. 3. Make sure that safety measures and/or robot safety configuration parameters have been set up to protect both programmers, operators and bystanders, as defined in the risk assessment.
-
Page 25: Intended Use
2.6. Intended Use Universal Robots e-Series are industrial robots intended to handle tools/end effectors and fixtures, or to process or transfer components or products. For details about the environmental conditions under which the robot should operate, see appendices and . -
Page 26: Risk Assessment
• Any use or application deviating from the intended use, specifications, and certifications is prohibited as the result could be death, personal injury and/or property damage. UNIVERSAL ROBOTS EXPRESSLY DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY OF FITNESS FOR ANY MISUSE. 2.7. Risk Assessment One of the most important things that an integrator needs to do is to perform a risk assessment. - Page 27 2. Safety • Teaching the robot during set-up and development of the robot installation • Troubleshooting and maintenance • Normal operation of the robot installation A risk assessment must be conducted before the robot arm is powered on for the first time.
-
Page 28: Pre-Use Assessment
(e.g. an enabling device to protect the operator during set-up and programming). Universal Robots identifies the potential significant hazards listed below as hazards that must be considered by the integrator. Other significant hazards can be present in a specific robot installation. -
Page 29: Emergency Stop
2. Safety • Test that System Emergency Stop outputs are actually capable of bringing the whole system to a safe state. • Test that the system connected to Robot Moving output, Robot Not Stopping output, Reduced Mode output, or Not Reduced Mode output can actually detect the output changes 2.9. - Page 30 2. Safety UR5e User Manual...
-
Page 31: Safety-Related Functions And Interfaces
3. Safety-related Functions and Interfaces 3.1. Introduction Universal Robots e-Series robots are equipped with a range of built-in safety functions as well as safety I/O, digital and analog control signals to or from the electrical interface, to connect to other machines and additional protective devices. Each safety function and I/O is constructed according to EN ISO13849-1 (see chapter 9. Certifications on page 61... -
Page 32: Configurable Safety Functions
IEC 61800-5-2. 3.3. Configurable Safety Functions Universal Robots robot safety functions, as listed in the table below, are in the robot but are meant to control the robot system i.e. the robot with its attached tool/end effector. - Page 33 3. Safety-related Functions and Interfaces Safety Description Function Momentum Limits maximum momentum of the robot. Limit Power Limit Limits mechanical work performed by the robot. Stopping Limits maximum time the robot uses for stopping after a protective stop Time Limit is initiated. Stopping Limits maximum distance travelled by the robot after a protective stop is Distance...
- Page 34 3. Safety-related Functions and Interfaces WARNING There are two exceptions to the force limiting function that are important when designing an application (Figure 4.1). As the robot stretches out, the knee-joint effect can give high forces in the radial direction (away from the base) at low speeds.
- Page 35 3. Safety-related Functions and Interfaces Safety Input Description Robot Performs a Stop Category 1 (IEC 60204-1) via Control Box input, Emergency informing other machines using the System Emergency Stop output, if Stop that output is defined. System Performs a Stop Category 1 (IEC 60204-1) on robot only, in all modes Emergency and takes precedence over all other commands.
-
Page 36: Safety Function
3. Safety-related Functions and Interfaces Safety Description Output Reduced Logic low when the safety system is in Reduced Mode. Mode Reduced Logic low when the system is not in Reduced Mode. Mode Safe Home Logic high when robot is in the configured Safe Home Position. All safety I/O are dual channel, meaning they are safe when low (e.g., the Emergency Stop is active when the signals are low). - Page 37 3. Safety-related Functions and Interfaces side of the trigger plane, back to the Normal Mode side, there is a 20mm area around the trigger plane where both Normal and Reduced Mode limits are allowed. It prevents the Safety Mode from flickering if the robot is right at the limit. Using an input to trigger Reduced Mode: When an input is used (to either start or stop Reduced Mode), up to 500ms can elapse before the new mode limit values are applied.
- Page 38 3. Safety-related Functions and Interfaces UR5e User Manual...
-
Page 39: Transportation
1. Make sure not to overload your back or other bodyparts when lifting the equipment. Use proper lifting equipment. All regional and national lifting guidelines shall be followed. Universal Robots cannot be held responsible for any damage caused by transportation of the equipment. - Page 40 4. Transportation UR5e User Manual...
-
Page 41: Mechanical Interface
5. Mechanical Interface 5. Mechanical Interface 5.1. Introduction This chapter describes the basics of mounting the parts of the robot system. Electrical installation instructions in chapter must be observed. 5.2. Workspace of the Robot The workspace of the robot extends 850 mm from the base joint. It is important to consider the cylindrical volume directly above and directly below the robot base when choosing a mounting place for the robot. - Page 42 5. Mechanical Interface WARNING Make sure the robot arm is properly and securely bolted in place. Unstable mounting can lead to accidents. Securing the Robot Arm Figure 6.1 shows where to drill holes and mount the screws. You can purchase an accurate base counterpart as an accessory. 1.
- Page 43 5. Mechanical Interface Surface on which the robot is fitted 0.05 0.030 8 FG8 8.5 min. 0.008 0.024 8 FG8 X 10 8.5 min. 0.006 6.1: Holes for mounting the robot. Use four M8 bolts. All measurements are in mm . Tool The robot tool flange has four M6 thread holes for attaching a tool to the robot. The M6 bolts must be tightened with 8 N m, strength class 8.8.
-
Page 44: Maximum Payload
5. Mechanical Interface 6.2: The tool output flange (ISO 9409-1-50-4-M6) is where the tool is mounted at the tip of the robot. All measures are in mm . Control Box The Control Box can be hung on a wall or placed on the ground. A clearance of 50 mm on each side of the Control Box is needed for sufficient airflow. -
Page 45: Payload Inertia
5. Mechanical Interface When computing the payload mass in a pick and place application, for example, consider both the gripper and object handled by the gripper. Payload [kg] Center of gravity offset [mm] 6.3: The relationship between the rated payload and the center of gravity offset. 5.4.1. -
Page 46: Electrical Interface
6. Electrical Interface 6. Electrical Interface 6.1. Introduction This chapter describes electrical interface groups for the Robot Arm in the Control Box. Examples are given for most types of I/O. The term I/O refers to both digital and analog control signals to or from the electrical interface groups listed below. -
Page 47: Electrical Warnings And Cautions
6. Electrical Interface To connect the Ethernet cable by passing it through the hole at the base of the Control Box, and plugging it into the Ethernet port on the underside of the bracket. Replace the cap at the base of the Control Box with an appropriate cable gland to connect the cable to the Ethernet port. - Page 48 1. Make sure all equipment not rated for water exposure remain dry. If water is allowed to enter the product, lockout-tagout all power and then contact your local Universal Robots service provider for assistance. 2. Only use the original cables supplied with the robot only. Do not use the robot for applications where the cables are subject to flexing.
-
Page 49: Controller I/O
EMC problems are found to happen usually in welding processes and are normally prompted by error messages in the log. Universal Robots cannot be held responsible for any damages caused by EMC problems. -
Page 50: Common Specifications For All Digital I/O
6. Electrical Interface In the GUI, you can set up configurable I/O as either safety-related I/O or general purpose I/O (see part Part II PolyScope Manual on page 97). 6.4.1. Common specifications for all digital I/O This section defines electrical specifications for the following 24V digital I/O of the Control Box. -
Page 51: Safety I/O
6. Electrical Interface *3.5A for 500ms or 33% duty cycle. The digital I/O are constructed in compliance with IEC 61131-2. The electrical specifications are shown below. Terminals Parameter Unit Digital Outputs Current* [COx / DOx] Voltage drop [COx / DOx] Leakage current [COx / DOx] Function Type... - Page 52 6. Electrical Interface Emergency Stop Safeguard Stop Robot stops moving Program execution Pauses Pauses Drive power Reset Manual Automatic or manual Frequency of use Infrequent Every cycle to infrequent Requires re-initialization Brake release only Stop Category (IEC 60204-1) Performance level of monitoring function (ISO 13849-1) Use the configurable I/O to set up additional safety I/O functionality, e.g.
- Page 53 6. Electrical Interface Default safety configuration The robot is delivered with a default configuration, which enables operation without any additional safety equipment (see illustration below). Safety Connecting emergency stop buttons Most applications require one or more extra emergency stop buttons. The illustration below shows how one or more emergency stop buttons can be connected.
- Page 54 6. Electrical Interface Configurable Inputs Configurable Outputs Configurable Inputs Configurable Outputs Safeguard stop with automatic resume An example of a basic safeguard stop device is a door switch where the robot is stopped when a door is opened (see illustration below). Safety This configuration is only intended for applications where the operator cannot go through the door and close it behind him.
- Page 55 The illustration below shows how to connect a Three-Position Enabling Device. See section 20. Operational Mode Selection on page 115 for more about Three-Position Enabling Device. NOTE The Universal Robots safety system does not support multiple external Three-Position Enabling Devices. Configurable Inputs 3-Position Switch NOTE The two input channels for the Three-Position Enabling Device input have a disagreement tolerance of 1 second.
-
Page 56: General Purpose Digital I/O
6. Electrical Interface Operational Mode Switch The illustration below shows an Operational Mode Switch. See section 20.1. Operational Modes on page 115 for more about operational Modes. Configurable Inputs Operational mode Switch 6.4.3. General purpose digital I/O This section describes the general purpose 24V I/O (Gray terminals) and the configurable I/O (Yellow terminals with black text) when not configured as safety I/O. -
Page 57: Communication With Other Machines Or Plcs
6. Electrical Interface 6.4.5. Communication with other machines or PLCs You can use the digital I/O to communicate with other equipment if a common GND (0V) is established and if the machine uses PNP technology, see below. Digital Inputs Digital Outputs Digital Inputs Digital Outputs 6.4.6. -
Page 58: Remote On/Off Control
6. Electrical Interface Terminals Parameter Unit Analog Output in voltage mode Voltage [AOx - AG] Current [AOx - AG] Resistance [AOx - AG] Resolution [AOx - AG] Using an Analog Output This example illustrates controlling a conveyor belt with an analog speed control input. Analog Power Using an Analog Input... -
Page 59: Mains Connection
6. Electrical Interface Terminals Parameter Unit Voltage [12V - GND] Current [12V - GND] Inactive voltage [ON / OFF] Active voltage [ON / OFF] Input current [ON / OFF] Activation time [ON] Remote ON button This example illustrates connecting a remote ON button. Remote Remote OFF button This example illustrates connecting a remote OFF button. - Page 60 6. Electrical Interface The mains supply is equipped with the following: • Connection to ground • Main fuse • Residual current device It is recommended to install a main switch to power off all equipment in the robot application as an easy means for lockout-tagout under service. The electrical specifications are shown in the table below.
-
Page 61: Robot Connection: Robot Cable
6. Electrical Interface WARNING 1. Ensure the robot is grounded correctly (electrical connection to ground). Use the unused bolts associated with grounding symbols inside the Control Box to create common grounding of all equipment in the system. The grounding conductor shall have at least the current rating of the highest current in the system. -
Page 62: Robot Connection: Base Flange Cable
6. Electrical Interface CAUTION Improper robot connection can result in loss of power to the robot arm. • Do not disconnect the Robot Cable when the robot arm is turned on. • Do not extend or modify the original Robot Cable. 6.7. -
Page 63: Tool I/O
6. Electrical Interface NOTICE Connecting the Base Flange Cable directly to any Control Box can result in equipment or property damage. • Do not connect the Base Flange Cable directly to the Control Box. 6.8. Tool I/O Adjacent to the tool flange on Wrist #3, there is an eight-pinned connector that provides power and control signals for different grippers and sensors that can be attached to the robot. -
Page 64: Tool Power Supply
6. Electrical Interface Color Signal Description White AI2 / RS485+ Analog in 2 or RS485+ Brown AI3 / RS485- Analog in 3 or RS485- Access Tool I/O in the Installation Tab (see part Part II PolyScope Manual on page 97) to set the internal power supply to 0V, 12V or 24V. The electrical specifications are shown below: Parameter Unit... -
Page 65: Tool Digital Outputs
6. Electrical Interface 1. In the Header, tap Installation. 2. In the list on the left, tap General. 3. Tap Tool IO and select Dual Pin Power. 4. Connect the wires Power (gray) to TO0 (blue) and Ground (red) to TO1 (pink). NOTE Once the robot makes an Emergency Stop, the voltage is set to 0V for both Power Pins (power is off). -
Page 66: Tool Digital Inputs
6. Electrical Interface CAUTION The Digital Outputs in the tool are not current-limited. Overriding the specified data can cause permanent damage. Using Tool Digital Outputs This example illustrates turning on a load using the internal 12V or 24V power supply. The output voltage at the I/O tab must be define. -
Page 67: Tool Analog Input
6. Electrical Interface POWER 6.8.6. Tool Analog Input Tool Analog Input are nondifferential and can be set to either voltage (0-10V) or current (4-20mA) on the I/O tab (see part Part II PolyScope Manual on page 97). The electrical specifications are shown below. Parameter Type Unit Input voltage in voltage mode... -
Page 68: Tool Communication I/O
6. Electrical Interface Using Tool Analog Inputs, Differential This example shows an analog sensor connection with a differential output. Connecting the negative output part to GND (0V), works in the same way as a nondifferential sensor. POWER 6.8.7. Tool Communication I/O •... -
Page 69: Maintenance And Repair
Service Manual. See the Service Manual: Chapter 5 for full inspection plan for trained individuals All parts returned to Universal Robots shall be returned according to terms in the Service Manual. 7.1. Safety Instructions After maintenance and repair work, checks must be done to ensure the required safety level. -
Page 70: Cleaning
7.3. Inspection 7.3.1. Robot Arm Inspection Plan The table below is a checklist of the type of inspections recommended by Universal Robots. Perform inspections regularly, as advised in the list. Any listed parts found to be in an unacceptable state must be repaired or replaced. -
Page 71: Robot Arm Visual Inspection
7. Maintenance and Repair You can access the Service Manual (http://www.universal-robots.com/support) for more on how to perform inspections. Timeframe Inspection action type Monthly Biannually Annually Check blue lids* ✘ Check flat rings ✘ Check robot cable ✘ Check robot cable connection ✘... -
Page 72: Control Box Inspection Plan
7.3.3. Control Box Inspection Plan The table below is a checklist of the type of inspections recommended by Universal Robots. Perform inspections regularly, as advised in the list. Any listed parts found to be in an unacceptable state must be repaired or replaced. -
Page 73: Freedrive Inspection
7. Maintenance and Repair NOTICE Using compressed air to clean inside the Control Box can damage components. • Do not use compressed air to clean inside the Control Box. 7.3.5. Freedrive Inspection 1. Unmount attachment or set TCP/Payload/CoG according to tool specifications. 2. -
Page 74: Disposal And Environment
VI, polybrominated biphenyls and polybrominated diphenyl ethers. Fee for disposal and handling of electronic waste of Universal Robots e-Series robots sold on the Danish market is prepaid to DPA-system by Universal Robots A/S. Importers in countries covered by the European WEEE Directive 2012/19/EU must make their own registration to the national WEEE register of their country. -
Page 75: Certifications
9. Certifications Third party certification is voluntary. However, to provide the best service to robot integrators, Universal Robots chooses to certify its robots at the recognized test institutes listed below. You can find copies of all certificates in the chapter Certificates. - Page 76 EU declarations. European directives are available on the official homepage: http://eur- lex.europa.eu. According to the Machinery Directive, Universal Robots’ robots are partly completed machines, as such a CE mark is not to be affixed. You can find the Declaration of Incorporation (DOI) according to the Machinery Directive in the...
-
Page 77: Warranties
Warranty default becoming evident. Ownership of devices or components replaced by and returned to Universal Robots shall vest in Universal Robots. Any other claims resulting out of or in connection with the device shall be excluded from this Warranty. -
Page 78: Disclaimer
10. Warranties 10.2. Disclaimer Universal Robots continues to improve reliability and performance of its products, and therefore reserves the right to upgrade the product without prior warning. Universal Robots takes every care that the contents of this manual are precise and correct, but takes no responsibility for any errors or missing information. -
Page 79: Stopping Time And Stopping Distance
11. Stopping Time and Stopping Distance 11. Stopping Time and Stopping Distance NOTE You can set user-defined safety rated maximum stopping time and distance. See 3.1. Introduction on page 17 21.6. Safety Menu Settings on page 121. If user-defined settings are used, the program speed is dynamically adjusted to always comply with the selected limits. - Page 80 11. Stopping Time and Stopping Distance Stopping time for joint 0 (BASE) Stopping time in seconds for 33% of 5kg Stopping time in seconds for 66% of 5kg Stopping time in seconds for maximum payload of 5kg Stopping distance for joint 1 (SHOULDER) Stopping distance in meters for 33% of 5kg Stopping distance in meters for 66% of 5kg Stopping distance in meters for maximum payload of 5kg...
- Page 81 11. Stopping Time and Stopping Distance Stopping time for joint 1 (SHOULDER) Stopping time in seconds for 33% of 5kg Stopping time in seconds for 66% of 5kg Stopping time in seconds for maximum payload of 5kg Stopping distance and time for joint 2 (ELBOW) Stopping distance in meters for all payloads Stopping time in seconds for all payloads User Manual...
-
Page 82: Declarations And Certificates
Serial Number Starting 20195000000 and higher — Effective 17 August 2019 Incorporation: Universal Robots UR3e, UR5e, UR10e and UR16e shall only be put into service upon being integrated into a final complete machine (robot system, cell or application), which conforms with the provisions of the Machinery Directive and other applicable Directives. - Page 83 12. Declarations and Certificates It is declared that the above products, for what is supplied, fulfill the following Directives as detailed below: Reference the harmonized (I) EN ISO 10218-1:2011 TUV Nord Cert. 4470814097607 (I) EN ISO 13849-1:2015 TUV Nord Cert. 4420714097610 standards used, referred to in Article 7(2) of (I) EN ISO 13732-1:2008, (I) EN 1037:1995+A1:2008...
-
Page 84: Certificates
13. Certificates 13. Certificates UR5e User Manual... - Page 85 13. Certificates TÜV NORD User Manual UR5e...
- Page 86 13. Certificates UR5e User Manual...
- Page 87 13. Certificates China RoHS User Manual UR5e...
- Page 88 13. Certificates KCC Safety UR5e User Manual...
- Page 89 13. Certificates KC Registration User Manual UR5e...
- Page 90 13. Certificates Environmental Test Certificate Climatic and mechanical assessment Client Force Technology project no. Universal Robots A/S 117-32120 Energivej 25 5260 Odense S Denmark Product identification UR 3 robot arms UR 3 control boxes with attached Teach Pendants. UR 5 robot arms UR5 control boxes with attached Teach Pendants.
- Page 91 13. Certificates EMC Test Certificate User Manual UR5e...
-
Page 92: Applied Standards
14. Applied Standards 14. Applied Standards This section describes relevant standards applied under the development of the robot arm and control box. A European Directive number appearing in brackets indicates the standard is harmonized according to that Directive. A standard is not a law, but a document developed by stakeholders within a given industry. Standards define the normal safety and performance requirements for a product or product group. - Page 93 The language is changed from British English to American English, but the content is the same. Part two (ISO 10218-2) of this standard is intended for the integrator of the robot system, and not Universal Robots. CAN/CSA-Z434-14 Industrial Robots and Robot Systems – General Safety Requirements This Canadian standard is the ISO standards ISO 10218-1 (see above) and -2 combined into one...
- Page 94 14. Applied Standards IEC 61326-3-1:2008 EN 61326-3-1:2008 Electrical equipment for measurement, control and laboratory use - EMC requirements Part 3-1: Immunity requirements for safety-related systems and for equipment intended to perform safety-related functions (functional safety) - General industrial applications This standard defines extended EMC immunity requirements for safety-related functions. Conforming to this standard ensures that the safety functions of UR robots provide safety even if other equipment exceeds the EMC emission limits defined in the IEC 61000 standards.
- Page 95 14. Applied Standards IEC 60320-1/A1:2007 IEC 60320-1:2015 EN 60320-1/A1:2007 [2006/95/EC] EN 60320-1:2015 Appliance couplers for household and similar general purposes Part 1: General requirements The mains input cable complies with this standard. ISO 9409-1:2004 [Type 50-4-M6] Manipulating industrial robots – Mechanical interfaces Part 1: Plates The tool flange on UR robots conforms to type 50-4-M6 of this standard.
- Page 96 14. Applied Standards Part 2-27: Tests - Test Ea and guidance: Shock Part 2-64: Tests - Test Fh: Vibration, broadband random and guidance UR robots are tested according to the test methods defined in these standards. IEC 61784-3:2010 EN 61784-3:2010 [SIL 2] Industrial communication networks –...
-
Page 97: Technical Specifications
15. Technical Specifications 15. Technical Specifications Robot type UR5e Weight 20.7 kg / 45.7 lb Maximum payload 5 kg / 11 lb (5. Mechanical Interface on page 27) Reach 850 mm / 33.5 in Joint ranges ± 360 ° for all joints Joints: Max 180 °/s . Tool: Approx. 1 Speed Approx. 39.4 System Update Frequency 500 Hz Force Torque Sensor Accuracy 4 N... - Page 98 15. Technical Specifications Materials Aluminium, PP plastic The robot can work in an ambient temperature range Temperature of 0-50 °C Power supply 100-240 VAC, 47-440 Hz TP Cable: Teach Pendant to Control Box 4.5 m / 177 in Standard (PVC) 6 m/236 in x 13.4 mm Robot Cable: Robot Arm to Control Box Standard (PVC) 12 m/472.4 in x 13.4 mm (options)
-
Page 99: Safety Functions Tables
Universal Robots e-Series Safety Functions and Safety I/O are PLd, Category 3 (ISO 13849-1), with certification by TŰV NORD (certificate # 44 207 14097610). Safety Function (SF) Descriptions (see Chapter 2 of manual: For safety I/O, the resulting safety function including the external device or equipment is determined by the overall architecture and the sum of all PFHds, including the UR robot safety function PFHd. - Page 100 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function This safety function is initiated Category 2 stop 1.20E- Robot Safeguard by an external protective device (IEC 60204-1) SS2 Stop4 using safety inputs which will stop (as described (Protective initiate a Cat 2 stop3.
- Page 101 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function Sets an upper limit for the joint Will not allow 1.15 °/s 1.20E- Joint Joint Speed speed. Each joint can have its motion to exceed (each) Limit own limit.
- Page 102 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function Monitors the TCP Pose (position Will not allow 3 ° 1.20E- Called 40 mm Tool and orientation) and will prevent motion to exceed various flange exceeding a safety plane or TCP any limit settings.
- Page 103 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function The Force Limit is the force Will not allow 1.50E- Force Limit exerted by the robot at the TCP motion to exceed (TCP) (tool center point) and “elbow”. any limit settings.
- Page 104 16. Safety Functions Tables SF# and Description PFHd Affects Safety Function SF10 When configured for Estop output and there is an Estop 4.70E-08 External UR Robot condition (see SF1), the dual outputs are LOW. If there is no connection Estop Estop condition, dual outputs are high. Pulses are not used to logic Output but they are tolerated.
- Page 105 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function SF15 Real time monitoring of Will not allow the 50 ms 1.20E- Robot Stopping conditions such that the stopping actual stopping Time Limit time limit will not be exceeded. time to exceed Robot speed is limited to ensure the limit setting.
- Page 106 16. Safety Functions Tables SF# and Description What happens? Tole- PFHd Affects Safety rance Function SF17 Safety function which monitors a The “safe home 1.7 ° 1.20E- External Safe Home safety rated output, such that it output” can only connection Position ensures that the output can only be activated to logic...
-
Page 107: Table
16. Safety Functions Tables Safety Description PFHd Affects Function Mode When the external connections are Low, Operation Mode Input to Robot switch (running/ automatic operation in automatic mode) is in SF2 (See INPUT effect. When High, mode is programming/ teach. Recommendation: Use with a 3-position enabling device. safeguard When in teach/program, initially the TCP speed will be limited stop) - Page 108 16. Safety Functions Tables ISO 10218-1 Technique Explanation UR e-Series Collaborative Speed and SSM is the robot maintaining a To facilitate SSM, UR Operation separation separation distance from any robots have the 2011 edition, monitoring operator (human). This is done by capability of switching clause 5.10.4 (SSM) safety...
- Page 109 16. Safety Functions Tables ISO 10218-1 Technique Explanation UR e-Series Collaborative Power and How to accomplish PFL is left to UR robots are power and Operation force limiting the robot manufacturer. The robot force limiting robots 2011 edition, (PFL) by design and/or safety functions will specifically designed to clause 5.10.5 inherent...
- Page 110 16. Safety Functions Tables UR5e User Manual...
-
Page 111: Part Ii Polyscope Manual
Part II PolyScope Manual Part II PolyScope Manual User Manual UR5e... - Page 112 Part II PolyScope Manual UR5e User Manual...
-
Page 113: Introduction
17.1. Robot Arm Basics The Universal Robots robot arm is composed of tubes and joints. You use the PolyScope to coordinate the motion of these joints to move the robot arm. You attach tools to end of the robot arm, or Tool Flange . -
Page 114: Touch Screen
17. Introduction 17.2.1. Touch Screen The Teach Pendant touch screen is optimized for use in industrial environments. Unlike consumer electronics, Teach Pendant touch screen sensitivity is, by design, more resistant to environmental factors such as: • water droplets and/or machine coolant droplets •... - Page 115 17. Introduction Program creates and/or modifies robot programs. Installation configures robot arm settings and external equipment e.g. mounting and safety. Move controls and/or regulates robot movement. I/O monitors and sets live Input/Output signals to and from robot control box. Log indicates robot health as well as any warning or error messages. Program and Installation Manager selects and displays active program and installation (see 28.4.
-
Page 116: Footer Buttons
17. Introduction Hamburger Menu accesses PolyScope Help, About and Settings. 17.2.3. Footer Buttons Initialize manages robot state. When RED, press it to make the robot operational. Speed Slider shows in real time the relative speed at which the robot arm moves, taking safety settings into account. Simulation button toggles a program execution between Simulation Mode and the Real Robot. -
Page 117: Turning The Control Box On/Off
17. Introduction 1. Unpack the robot arm and the Control Box. 2. Mount the robot arm on a sturdy, vibration-free surface. Verify the surface can withstand at least 10 times the full torque of the base joint and at least 5 times the weight of the robot arm. 3. -
Page 118: Starting Up The Robot Arm
17. Introduction In the Footer, to the left, the Initialize button indicates the status of the robot arm using colors: • Red Power off. The robot arm is in a stopped state. • Yellow Idle. The robot arm is on, but not ready for normal operation. •... -
Page 119: Quick System Start-Up
9. Tap the Start button, for the robot to release its brake system. The robot vibrates and makes clicking sounds indicating it is ready to be programmed. NOTE Learn to program your Universal Robots robot on www.universal- robots.com/academy/ 17.6. The First Program A program is a list of commands telling the robot what to do. -
Page 120: Robot Registration And Urcap License Files
17. Introduction teach the position by pulling the Robot Arm into place while holding down the Freedrive button at the top of the Teach Pendant. You can create a program can to send I/O signals to other machines at certain points in the robot’s path, and perform commands like if…then and loop, based on variables and I/O signals. -
Page 121: Registering The Robot From Your Current Screen
17. Introduction 17.7.1. Registering the Robot from Your Current Screen 1. In the Header, tap the Hamburger Menu and select Settings. 2. In the menu on the left, tap System and select Robot Registration for the Settings screen to appear. 3. Follow steps 1 and 2 on the screen to register your robot. 17.7.2. -
Page 122: Unregistering Robot
Before your system can reach a secure state of operation, ensure the following: • You have a thourough understanding of general cyber security principles and advanced technologies as used in your Universal Robots robot. • You take physical security measures to allow only trusted personnel physical access to the... -
Page 123: Hardening Cyber Security
17. Introduction robot. • You only connect your robot to a trusted network, behind a firewall restricting both inbound and outbound access to/from the Internet. 17.8.2. Hardening Cyber Security Although PolyScope includes many features for keeping the network connection secure, you can harden security by observing to following guidelines: •... - Page 124 17. Introduction UR5e User Manual...
-
Page 125: Freedrive
18. Freedrive 18. Freedrive This chapter describes how to start using the robot arm in Freedrive. Freedrive allows the robot arm to be manually pulled into desired positions and poses. As you use Freedrive, the robot arm creates a repelling force if it approaches a joint limit or a safety plane (see 21.11.2. -
Page 126: Enabling Freedrive: Standard Teach Pendant
18. Freedrive You can lock one or more of the axes allowing the TCP to move in a particular direction, as defined in the table below. Movement is allowed through all axes. All axes are free Movement is only allowed through the X-axis and Y-axis. Plane Movement is allowed through all axes, without rotation. -
Page 127: Using The Freedrive Button
18. Freedrive • Use the Freedrive button. • Use the Freedrive button on the Move Tab screen (see 25.2.4. Freedrive on page 240). • Use I/O Actions (see I/O Actions and I/O Tab Control). WARNING • Do not enable Freedrive when you are pushing or touching the robot, as this may cause the robot to drift. -
Page 128: Backdrive
19. Backdrive 19. Backdrive Backdrive is used to force specific joints to a desired position without releasing all brakes in the robot arm. This is sometimes necessary if the robot arm is close to collision and the vibrations that accompany a full restart are not desired. 19.1. -
Page 129: Operational Mode Selection
*** If a Three-Position Enabling Device is configured, the robot operates at Manual Reduced Speed unless Manual High Speed is activated. NOTE • A Universal Robots robot may not be equipped with a Three-Position Enabling Device. If the risk assessment requires the device, it must be attached before the robot is used. - Page 130 20. Operational Mode Selection WARNING • Any suspended safeguards must be returned to full functionality before selecting Automatic Mode. • Wherever possible, the Manual Mode of operation shall be performed with all persons outside the safeguard space. • The device used to switch between Operational Modes must be placed outside the safeguarded space.
-
Page 131: Three-Position Enabling Device
20. Operational Mode Selection Using the Dashboard Server 1. Connect to the Dashboard server. 2. Use the Set Operational Mode commands. • Set Operational Mode Automatic • Set Operational Mode Manual • Clear Operational Mode http://universal-robots.com/support/ for more on using the Dashboard server. 20.2. - Page 132 20. Operational Mode Selection UR5e User Manual...
-
Page 133: Safety Configuration
21. Safety Configuration 21. Safety Configuration 21.1. Safety Settings Basics This section covers how to access the robot safety settings. It is made up of items that help you set up the robot Safety Configuration. WARNING Before you configure your robot safety settings, your integrator must conduct a risk assessment to guarantee the safety of personnel and equipment around the robot. -
Page 134: Setting A Safety Password
21. Safety Configuration You can find more safety system information in the Hardware Installation Manual. 21.2. Setting a Safety Password You must set a password to Unlock all safety settings that make up your Safety Configuration. If no safety password is applied, you are prompted to set it up. 1. -
Page 135: Applying New Safety Configuration
21. Safety Configuration 1. Verify that changes comply with the risk assessment conducted by the integrator. 2. Adjust safety settings to the appropriate level defined by the risk assessment conducted by the integrator. 3. Verify that the settings are applied. 4. Place following text in the operators’ manuals: “Before working near the robot, make sure that the safety configuration is as expected. - Page 136 21. Safety Configuration 1. Factory Presets is where you can use the slider to select a predefined safety setting . The values in the table are updated to reflect the preset values ranging from Most Restricted to Least Restricted NOTE Slider values are only suggestions and do not substitute a proper risk assessment.
-
Page 137: Safety Modes
21. Safety Configuration Tool Speed limits maximum robot tool speed. Tool Force limits the maximum force exerted by the robot tool in clamping situations. Elbow Speed limits maximum robot elbow speed. Elbow Force limits maximum force that the elbow exerts on the environment. The tool speed and force are limited at the tool flange and the center of the two user-defined tool positions, see 21.14. -
Page 138: Tolerances
21. Safety Configuration Recovery mode activates when a safety limit from the active limit set is violated, the robot arm performs a Stop Category 0. If an active safety limit, such as a joint position limit or a safety boundary, is violated already when the robot arm is powered on, it starts up in Recovery mode. This makes it possible to move the robot arm back within the safety limits. -
Page 139: Planes
21. Safety Configuration 21.11. Planes NOTE Configuring planes is entirely based on features. We recommend you create and name all features before editing the safety configuration, as the robot is powered off once the Safety Tab has been unlocked and moving the robot will be impossible. -
Page 140: Configuring Safety Planes
21. Safety Configuration When the safety system is in Normal mode, a normal plane is active and it acts as a strict limit on the position. Reduced When the safety system is in Reduced mode, a reduced mode plane is active and it acts as a strict limit on the position. -
Page 141: Elbow
21. Safety Configuration 21.11.3. Elbow You can enable Restrict Elbow to prevent robot elbow joint from passing through any of your defined planes. Disable Restrict Elbow for elbow to pass through planes. 21.11.4. Color Codes Gray Plane is configured but disabled (A) User Manual UR5e... -
Page 142: Freedrive
21. Safety Configuration Yellow & Black Normal Plane (B) Blue & Green Trigger Plane (C) Black Arrow The side of the plane the tool and/or elbow is allowed to be on (For Normal Planes) Green Arrow The side of the plane the tool and/or elbow is allowed to be on (For Trigger Planes) Gray Arrow The side of the plane the tool and/or elbow is allowed to be on (For Disabled Planes) 21.12. -
Page 143: Tool Position
21. Safety Configuration 3. Brakes are only released in the joints to which significant pressure is applied. As long as the Freedrive button is engaged/pressed. While using Backdrive, the robot arm feels heavy to move around. 21.14. Tool Position The Tool Position screen enables more controlled restriction of tools and/or accessories placed on the end of the robot arm. -
Page 144: Tool Direction
21. Safety Configuration the drop down menu changes to custom, indicating that there is a difference between the copied TCP and the actual limit input. The original TCP is still available in the drop down list and can be selected again to change the values back to the original position. The selection in the copy TCP drop down menu does not affect the tool name. -
Page 145: Limit Properties
21. Safety Configuration NOTE Configuration of the tool direction is based on features. We recommend you create desired feature(s) before editing the safety configuration, as once the Safety Tab has been unlocked, the robot arm powers off making it impossible to define new features. -
Page 146: Tool Properties
21. Safety Configuration 21.15.2. Tool Properties By default, the tool points in the same direction as the Z axis of the tool output flange. This can be modified by specifying two angles: Tilt angle: How much to tilt the Z axis of the output flange towards the X axis of the output flange Pan angle: How much to rotate the tilted Z axis around the original output flange Z axis. -
Page 147: Output Signals
21. Safety Configuration If you are using a built-in 3-Position Enabling Device, the button must be pressed and held in the mid position to move the robot. Operational Mode When defined, this input can be used to switch between Automatic Mode and Manual Mode (see 20.1. -
Page 148: Ossd Safety Signals
21. Safety Configuration Signal is Low when the robot arm is placed in Reduced mode or if the safety input is configured with a Reduced Mode input and the signal is currently low. Otherwise the signal is high. Not Reduced Mode This is the inverse of the Reduced Mode defined above. -
Page 149: Hardware
21. Safety Configuration 21.17. Hardware You can use the robot without attaching the Teach Pendant. Removing the Teach Pendant requires defining another Emergency Stop source. You must specify if the Teach Pendant is attached to avoid triggering a safety violation. 21.17.1. Selecting Available Hardware The robot can be used without PolyScope as the programming interface. -
Page 150: Syncing From Home
21. Safety Configuration 21.18.1. Syncing from Home 1. In the Header, tap Installation. 2. In the Side Menu on the left of the screen, tap Safety and select Safe Home. 3. Under Safe Home, tap Sync from Home. 4. Tap Apply and in the dialog box that appears, select Apply and restart. 21.19. -
Page 151: Editing Safe Home
21. Safety Configuration 21.20.1. Editing Safe Home 1. In the Header, tap Installation. 2. In the Side Menu on the left of the screen, under General, select Home. 3. Tap Edit Position and set the new robot arm position and tap OK. 4. - Page 152 21. Safety Configuration UR5e User Manual...
-
Page 153: Run Tab
22. Run Tab 22. Run Tab The Run tab allows you to simply operate the robot arm and control box, using as few buttons and options as possible. You can combine simple operation with password protecting the programming part of PolyScope (see 29.3. Settings on page 259), to make the robot into a tool that can run exclusively pre-written programs. -
Page 154: Robot Age
22. Run Tab These are available to the running program only and their values are lost as soon as the program is stopped. Show waypoints The robot program uses script variables to store information about waypoints. Select the Show Waypoints checkbox, under Variables to show script variables in the variables list. -
Page 155: Move Robot To
22. Run Tab 22.4.2. Move robot to: Hold down Move robot to: to move the Robot Arm to a start position. The animated Robot Arm displayed on-screen shows the desired movement about to be performed. NOTE Collision can damage the robot or other equipment. Compare the animation with the position of the real Robot Arm to ensure the Robot Arm can safely perform the movement without colliding with any obstacles. - Page 156 22. Run Tab UR5e User Manual...
-
Page 157: Program Tab
23. Program Tab 23. Program Tab The program tab shows the current program being edited. 23.1. Program Tree By tapping Command you add program nodes to the Program Tree. Configure the functionality of the added program nodes on the right side of the screen. An empty Program Tree is not allowed to run. -
Page 158: Program Execution Indication
23. Program Tab 23.1.1. Program Execution Indication When the program is running, the program node currently being executed is indicated by a small icon next to the node. Furthermore, the path of execution is highlighted using a blue color. Pressing the icon at the corner of the program will make it track the command being executed. -
Page 159: Copy
23. Program Tab 23.2.4. Copy button allows copies a node and allows it to be used for other actions (e.g., paste it on other place on the Program Tree). 23.2.5. Paste button allows you to paste a node that was previously cut or copied. 23.2.6. -
Page 160: Command: Variables Initialization
23. Program Tab While the expression itself is edited as text, the expression editor has a number of buttons and functions for inserting the special expression symbols, such as * for multiplication and ≤ for less than or equal to. The keyboard symbol button in the top left of the screen switches to text-editing of the expression. -
Page 161: Starting A Program From A Selected Node
23. Program Tab 23.5. Starting a Program from a Selected Node When the robot is in Manual Mode (see 20.1. Operational Modes on page 115), Play from Selection allows a program to start from a selected node. Play from Beginning runs a program normally. The Play from Selection option is disabled if a program cannot be run from a particular node. - Page 162 23. Program Tab 1. In a Program tree, tap a line number to set or clear a breakpoint. A red line either above of below a node, indicates when a breakpoint is set, pausing execution. Most nodes pause before they are executed, with the following exceptions: •...
-
Page 163: Single Step In A Program
23. Program Tab 23.7. Single Step in a Program The Single Step button allows one node to be executed at a time, when the robot is in Manual mode. You can use the Single Step button when the program is paused. Tap the Single Step button for the program to continue execution, and pause when reaching the following node in the program. -
Page 164: Graphics Tab
23. Program Tab 3. You can select Keep value from previous run to initialize the variable to the value found on the Variables tab (see 23.10. Variables Tab on the facing page). This allows variables to maintain their values between program executions. The variable gets its value from the expression if the program is run for the first time, or if the value tab has been cleared. -
Page 165: Variables Tab
23. Program Tab Safety planes are visualized in yellow and black with a small arrow representing the plane normal, which indicates the side of the plane on which the robot TCP is allowed to be positioned. Trigger planes are displayed in blue and green and a small arrow pointing to the side of the plane, where the Normal mode limits (see 21.8. -
Page 166: Basic Program Nodes
23. Program Tab 23.11. Basic Program Nodes 23.11.1. Move The Move command controls the robot motion through the underlying waypoints. Waypoints have to be under a Move command. The Move command defines the acceleration and the speed at which the robot arm will move between those waypoints. Movement Types You can select one of three types of movements: MoveJ, MoveL and MoveP. - Page 167 23. Program Tab whereas a higher value will make the path smoother. While the robot arm is moving through the waypoints with constant speed, the robot control box cannot wait for either an I/O operation or an operator action. Doing so might stop the robot arm’s motion, or cause a protective stop.
- Page 168 23. Program Tab Setting the TCP in a Move 1. Access the Program Tab screen to set the TCP used for waypoints. 2. Under Command, in the drop down menu on the right select the Move type. 3. Under Move, select an option in the Set TCP drop down menu. 4.
-
Page 169: Fixed Waypoint
23. Program Tab 23.11.2. Fixed Waypoint A point on the robot path. Waypoints are the most central part of a robot program, telling the robot arm where to be. A fixed position waypoint is taught by physically moving the robot arm to the position. - Page 170 23. Program Tab 3. Set the desired feature. Setting the waypoint Waypoint names Waypoints automatically get a unique name. The name can be changed by the user. By selecting the link icon, waypoints are linked and share position information. Other waypoint information such as blend radius, tool/joint speed and tool/joint acceleration is configured for individual waypoints even though they may be linked.
- Page 171 23. Program Tab The stop at (WP_2) can be avoided by configuring a blend for the waypoint, allowing the robot to calculate a smooth transition into the next trajectory. The primary parameter for the blend is a radius. When the robot is within the blend radius of the waypoint it can start blending and deviate from the original path.
- Page 172 23. Program Tab WP_1 WP_2 WP_3 WP_4 12.4: Blend radius overlap not allowed (*). Conditional blend trajectories The blend trajectory is affected both by the waypoint where the blend radius is set and the following one in the program tree. That is, in the program in figure 12.5 the blend around (WP_1) is affected by (WP_2) .
- Page 173 23. Program Tab WP_I WP_1 WP_2 WP_F_1 WP_F_2 12.5: WP_I is the initial waypoint and there are two potential final waypoints WP_F_1 and WP_F_ 2, depending on a conditional expression. The conditional if expression is evaluated when the robot arm enters the second blend (*). Blend Trajectories WP_2 WP_1...
-
Page 174: Relative Waypoint
23. Program Tab Depending on the movement type (i.e., MoveL, MoveJ, or MoveP), different blend trajectories are generated. • Blends in MoveP When blending in MoveP, the position of the blend follows a circle arc at constant speed. The orientation blends with a smooth interpolation between the two trajectories. -
Page 175: Variable Waypoint
23. Program Tab A waypoint with the position given relative to the robot arm’s previous position, such as “two centimeters to the left”. The relative position is defined as the difference between the two given positions (left to right). Note: repeated relative positions can move the robot arm out of its workspace. The distance here is the Cartesian distance between the TCP in the two positions. -
Page 176: Direction
23. Program Tab 23.11.5. Direction The program node Direction specifies a motion relative to feature axes or TCPs. The robot moves in along the path specified by the Direction Program Node until that movement is stopped by an Until condition. Adding a Direction Movement 1. -
Page 177: Until
23. Program Tab 23.11.6. Until The program node Until defines a stop criterion for a motion. The robot moves along a path and stops when contact is detected. In the Progran Tree, you can add Until Nodes under Direction Nodes and Waypoint Nodes. You can add several stop criteria to a single movement. The motion stops when the first Until condition is met. - Page 178 23. Program Tab CAUTION The default speed of motion is too high for contact detection. A faster speed of motion triggers a Protective Stop, before the Tool Contact condition can take effect. To avoid triggering a Protective Stop, lower the speed of motion. For example: 100m/s.
-
Page 179: Wait
23. Program Tab Retract to Contact Use the Retract to Contact setting for the robot to return to the initial point of contact. You can set an additional reverse movement to make the robot move free of, or toward, contact. This is useful if you have a gripper that needs free space to move, or if a clamping action is needed. -
Page 180: Set
23. Program Tab 23.11.9. Set If the active TCP for a particular motion is known at the time of writing of the program, you can use the TCP selection by tapping Move in the Side Menu on the left, (see 23.11.1. Move on page 152). -
Page 181: Halt
23. Program Tab The Popup is a message that appears on the screen when the program reaches the Popup node in the program tree. Under the Command tab, tap the empty field and use the on-screen keyboard to create text content for the popup message. Messages are limited to a maximum of 255 characters. -
Page 182: Comment
23. Program Tab 23.11.12. Comment Gives the programmer an option to add a line of text to the program. This line of text does not do anything during program execution. 23.11.13. Folder A Folder is used to organize and label specific parts of a program, to clean up the program tree, and to make the program easier to read and navigate. -
Page 183: Set Payload
23. Program Tab 23.11.14. Set Payload Use the Set Payload command to set the payload of the robot arm. You can adjust the payload weight to prevent the robot from triggering a protective stop, when the weight at the tool differs from the expected payload. -
Page 184: Advanced Program Nodes
23. Program Tab 23.12. Advanced Program Nodes 23.12.1. Loop Loops the underlying program commands. Depending on the selection, the underlying program commands are either looped infinitely, a certain number of times or as long as the given condition is true. When looping a certain number of times, a dedicated loop variable (called loop_1 in the screen shot above) is created, which can be used in expressions within the loop. - Page 185 23. Program Tab Select conditions in the Expression Editor that make up expressions using an If statement. If a condition is evaluated as True, the statements within this If command are executed. An If statement can have only one Else statement. Use Add ElseIf and Remove ElseIf to add and remove ElseIf expressions.
-
Page 186: Subprogram
23. Program Tab 23.12.3. SubProgram A SubProgram can hold program parts that are needed several places. A SubProgram can be a separate file on the disk, and can also be hidden to protect against accidental changes to the SubProgram. Call Subroutine A call to a Subroutine will run the program lines in the SubProgram, and then return to the following line. -
Page 187: Assignment
23. Program Tab 23.12.4. Assignment Assigns values to the variables. The variable value can be the result of expressions created in the Expression Editor (see section 23.3. Expression Editor on page 145). You can also request a variable value from an operator. When requesting a value from an operator, it is possible to display an Operator Message to validate input against common variable types. -
Page 188: Event
23. Program Tab • Line allows you to write a single line of URscript code, using the Expression Editor ( 23.3. Expression Editor on page 145) • File allows you to write, edit or load URscript files. You can find instructions for writing URscript in the Script Manual on the support website (http://www.universal-robots.com/support). -
Page 189: Thread
23. Program Tab 23.12.7. Thread A thread is a parallel process to the robot program. A thread can be used to control an external machine independently of the robot arm. A thread can communicate with the robot program with variables and output signals. 23.12.8. -
Page 190: Timer
23. Program Tab A Switch Case construction can make the robot change behavior based on sensor inputs or variable values. Use the Expression Editor to describe the base condition and define the cases under which the robot should proceed to the sub-commands of this Switch. If the condition is evaluated to match one of the cases, the lines inside the Case are executed. -
Page 191: Home
23. Program Tab 23.12.10. Home The Home node uses joint angles to move the robot to a predefined Home position. If defined as a Safe Home position,the Home node displays as Home(Safety) in the Program Tree. If the Home position is out of sync with Safety, the node is undefined. 23.13. - Page 192 23. Program Tab Creating a Palletizing Program 1. Decide if you want to teach a Feature (see 24.17. Features on page 223) or use a Base as a reference plane. 2. In the Program Tab, under Templates, tap Palletizing. 3. On the Palletizing screen, select one of the following actions depending on the desired action.
- Page 193 23. Program Tab 7. Tap the pattern node(s) on the Program Tree to teach the robot layer-specific positions (e.g., start/end points, grid corners, and/or number of items). See 23.11.1. Move on page 152 teaching instructions. All positions must be taught at the bottom of the pallet. To duplicate a pattern, tap the Duplicate pattern button on the Pattern node screen that you wish to duplicate.
- Page 194 23. Program Tab 1. Tap the At Each Item node on the Program Tree. 2. On the At Each Item screen, tap Next. 3. Tap the Move Here button. Then, hold the Auto button or use the Manual button to move the robot to the ReferencePoint.
- Page 195 23. Program Tab (B) Manual Configuration 1. Tap the At Each Item node on the Program Tree. 2. On the At Each Item start screen, tap Manual Configuration. 3. Use the drop-down menus to select a Pattern and a ReferencePoint item. Tap the Use this ReferencePoint button to set the ReferencePoint.
- Page 196 23. Program Tab • Pick Up Separator to program the robot to pick up separators for palletizing • Drop Off Separator to drop off separators for depalletizing (A) Separator Wizard 1. Tap the Separator Action node on the Program Tree. 2. On the Separator Action screen, tap Next. 3.
-
Page 197: Seek
23. Program Tab • You can change the speeds and blends radii (see 23.11.1. Move on page 152). • You can add other program nodes to the At Each Item sequence or the Separator Action sequence. 23.13.2. Seek The seek function uses a sensor to determine the correct position to grab or drop an item. This function allows for working on stacks of items of varying thickness, and determining the exact positions of the items are either unknown or too hard to program. - Page 198 23. Program Tab Stacking During Stacking, the robot arm moves to point A, then moves opposite the direction to search for the next stack position. When the next stack position is found, the robot remembers it and performs the special sequence. In subsequent rounds, the robot starts the search from the remembered position, incremented by the item's thickness along the direction.
- Page 199 23. Program Tab Destacking During Destacking, the robot arm moves from point A in the given direction to search for the next item. The condition on the screen determines when the next item is reached. When the condition is satisfied, the robot remembers the position and performs the special sequence. In subsequent rounds, the robot starts the search from the remembered position, incremented by the item's thickness along the direction.
- Page 200 23. Program Tab Direction The direction, given by positions B to C, is calculated as the position difference from the TCP of B to the TCP of C. Direction does not consider the orientations of the points. Next Stacking Position Expression The robot arm moves along the direction vector while continuously evaluating whether the next stack position has been reached.
-
Page 201: Force
23. Program Tab 23.13.3. Force NOTE Using this function at the same time as Conveyor Tracking and/or Path Offset can lead to program conflict. • Do not use this function together with Conveyor Tracking or Path Offset. Force mode is suited to applications where the actual TCP position along a predefined axis is not important, but instead a desired force along that axis is required. - Page 202 23. Program Tab Feature selection The Feature menu is used to select the coordinate system (axes) the robot will use while it is operating in force mode. The features in the menu are those which have been defined in the installation (see 24.17.
-
Page 203: Force Value Selection
23. Program Tab When the robot arm is not moving: If force mode is entered with the robot arm standing still, there will be no compliant axes until the TCP speed is above zero. If later, while still in force mode, the robot arm is again standing still, the task frame has the same orientation as the last time the TCP speed was larger than zero. -
Page 204: Conveyor Tracking
23. Program Tab 23.13.7. Conveyor Tracking NOTE Using this function at the same time as Force and/or Path Offset can lead to a program conflict. • Do not use this function together with Force or Path Offset. Conveyor Tracking allows the Robot Arm to track the movement of up to two conveyors. Conveyor Tracking is defined in the Installation Tab (see section 24.14. -
Page 205: Screwdriving
23. Program Tab NOTE If there is a Conveyor Tracking node inside an If, ElseIf or Loop, and the Check Expression Continuously option is selected, you can add an end_ conveyor_tracking() script at the end of the expression to exit conveyor tracking. -
Page 206: Screwdrive Until
23. Program Tab Select Enable Machine Error Handler, to add a corrective measure, if required, to the Program Tree before the screwdriving actions begins. Selecting Follow the Screw, under Process, to affect the screwdriving action in the following ways: • Force: Select Force to define how much force is exerted on a screw. Then select Speed Limit, so the robot moves at this speed as long as it does not come into contact with the screw. -
Page 207: Urcaps
23. Program Tab • Success: Screwdriving continues until completion is detected using your selected option. You can only add one success condition. • Error: Screwdriving continues until an error is detected using your selected option/s. You can add more than one error condition. Success •... - Page 208 23. Program Tab Similar to a regular TCP (see 24.2. TCP Configuration on page 205) you can define and name an RTCP in the Installation Tab’s Setup. You can also complete the following actions: • Add, rename, modify, and remove RTCPs • Understand the default and active RTCP •...
-
Page 209: Remote Tcp Movement Types
23. Program Tab 23.14.2. Remote TCP Movement Types RTCP_MoveP Similar to a regular MoveP, the RTCP_MoveP defines the tool speed and acceleration the Robot Arm moves relative to the Remote TCP. See 24.2. TCP Configuration on page 205. RTCP Circle move Similar to a regular Circle move, the RTCP Circle move can be added to an RTCP_MoveP to make circular movements. -
Page 210: Remote Tcp Toolpath
23. Program Tab smoothens the path. RTCP Waypoints are taught by physically moving the Robot Arm to a desired position. Teaching RTCP Waypoints 1. In the Program Tab, insert an RTCP_MoveP node. 2. On the RTCP_MoveP node, tap Set to bring up the Move screen. 3. - Page 211 23. Program Tab The Remote TCP and Toolpath URCap generates robots motions automatically, making it easier to follow complex trajectories accurately. Configuring a Remote TCP Toolpath 1. Select Remote TCP Toolpath Moves on the Remote TCP & Toolpath URCap Home Page to enter the workflow. 2.
-
Page 212: Remote Tcp
23. Program Tab 1. Load the toolpath files in the root directory of a USB stick. Toolpath files must have the .nc extension 2. Insert the USB stick into the Teach Pendant. 3. In the Header, tap Installation, tap URCaps, select Remote TCP & Toolpath, select Remote TCP - Toolpath Moves, and select Toolpath. - Page 213 23. Program Tab Configuring a Remote TCP PCS Use this method if the PCS can be set on the part surface. 1. Use freedrive to manually grasp the part with the gripper. 2. Select a Remote TCP to teach the reference points. For high accuracy, temporarily set up a sharp Remote TCP to complete this teaching process.
- Page 214 23. Program Tab Setting a Variable PCS For advanced use cases, where the part is not grasped with high consistency, you can set a Variable PCS to adjust the toolpath moves according to the part location and orientation relative to the robot tool flange. You can create a pose variable tied to an external sensor that can detect the PCS location and orientation.
-
Page 215: Regular Tcp Toolpath Moves
23. Program Tab 1. Access the Program Tab and tap URCaps. 2. Select Remote TCP Move to insert an RTCP_MoveP node. 3. Select a TCP and set the motion parameters: tool speed, tool acceleration and blend radius. 4. Tap +Toolpath to insert an RTCPToolpath node. Delete the RTCPWaypoint node that was created by default, if it is not needed. - Page 216 23. Program Tab Configuring a Regular TCP • Follow the instructions in 24.2. TCP Configuration on page 205 to configure a Regular TCP. • Verify the positive Z-axis of the tool points away from the part surface. Configuring a Plane Feature PCS 1. Create a plane feature by Adding a plane or Teaching a plane. See 24.17.5.
- Page 217 23. Program Tab 6. Tap Move to First Point to verify the tool can move to the first point of the toolpath. 7. Run the program in the simulation mode, at a low speed, to confirm the configurations are correct. NOTE You can ensure the robot motion is identical, each time the toolpath is executed, by adding a MoveJ with a Use Joint Angles set to move to a fixed joint configuration before executing the toolpath.
- Page 218 23. Program Tab UR5e User Manual...
-
Page 219: Installation Tab
24. Installation Tab 24. Installation Tab 24.1. General The Installation Tab allows you to configure the settings which affect the overall performance of the robot and PolyScope. 24.2. TCP Configuration A Tool Center Point (TCP) is a point on the robot’s tool. Each TCP contains a translation and a rotation relative to the center of the tool output flange. -
Page 220: Adding, Renaming, Modifying And Removing Tcps
24. Installation Tab 24.2.3. Adding, Renaming, Modifying and Removing TCPs You can start configuring a new TCP with the following actions: • Tap the to define a new TCP with a unique name. The new TCP is available in the dropdown menu. •... -
Page 221: Teaching Tcp Orientation
24. Installation Tab 1. Tap Measure. 2. Choose a fixed point in the workspace of the robot. 3. Use the position arrows on the right side of the screen to move the TCP from at least three different angles and to save the corresponding positions of the tool output flange. 4. -
Page 222: Adding, Renaming, Modfying And Removing Payloads
24. Installation Tab You can define multiple Payloads, and switch between them in your program. This is useful in Pick and Place applications, for example, where the robot picks up and releases an object. 24.3.1. Adding, Renaming, Modfying and Removing Payloads You can start configuring a new Payload with the following actions: •... -
Page 223: Payload Estimation
24. Installation Tab 24.3.3. Payload Estimation This feature allows the robot to help set the correct Payload and Center of Gravity (CoG). Using the Payload Estimation Wizard 1. In the Installation Tab, under General, select Payload. 2. On the Payload screen, tap Measure. 3. -
Page 224: Mounting
24. Installation Tab 24.4. Mounting Specifying the mounting of the Robot arm serves two purposes: 1. Making the Robot arm appear correctly on screen. 2. Telling the controller about the direction of gravity. An advanced dynamics model gives the Robot arm smooth and precise motions, as well as allows the Robot arm to hold itself in Freedrive Mode. -
Page 225: I/O Setup
24. Installation Tab If the Robot arm is mounted on a flat table or floor, no change is needed on this screen. However, if the Robot arm is ceiling mounted, wall mounted, or mounted at an angle, this needs to be adjusted using the buttons. -
Page 226: Assigning User-Defined Names
24. Installation Tab 24.5.2. Assigning User-defined Names You can name the Input and Output signals to easily identify the ones being used. 1. Select the desired signal. 2. Tap the text field to type a name for the signal. 3. To reset the name to default, tap Clear. You must provide a user-defined name for a general purpose register to make it available in the program (i.e., for a Wait command or the conditional expression of an If command). - Page 227 24. Installation Tab Action Output state Program state Low when not running Stopped or paused High when not running High Stopped or paused High when running, low when Running High Stopped or paused stopped Low on unscheduled stop Program terminated unscheduled Low on unscheduled stop, Program terminated unscheduled High...
-
Page 228: Installation Variables
24. Installation Tab 24.6. Installation Variables Variables created on the Installation Variables screen are called installation variables and are used like normal program variables. Installation variables are distinct because they keep their value even if a program stops then starts again, and when the robot arm and/or Control Box is powered down and powered up again. -
Page 229: Startup
24. Installation Tab 1. Select the variable and tap Delete. If a loaded program has the same name as a program variable, or if a loaded installation has the same name as the installation variable, you are presented the following options: You can either resolve the issue using the installation variables of the same name instead of the program variable or resolve the issue by having the conflicting variables renamed automatically. -
Page 230: Loading A Startup Program
24. Installation Tab 24.7.1. Loading a Startup Program A default program is loaded after the Control Box is powered up. Furthermore, the default program is auto loaded when the Run Program screen (see 22. Run Tab on page 139) is entered and no program is loaded. 24.7.2. -
Page 231: Tool Analog Inputs
24. Installation Tab 1. Tap the Installation tab and under General, tap Tool I/O 2. Under I/O Interface Control, select User to access the Tool Analog Inputs and/or Digital Output Mode settings. Selecting a URCap removes access to the Tool Analog Inputs and the Digital Output Mode settings. -
Page 232: Dual Pin Power
24. Installation Tab • Push / Pull: This allows the pin to be configured in a Push / Pull configuration. When the output is on, the pin provides a positive voltage source (configurable in IO Tab). This can be used in conjunction with the GND pin to create a full circuit When the output is off, the pin allows a current to flow to the ground. -
Page 233: Home
24. Installation Tab 24.13. Home Home is a user-defined return position for the Robot Arm. Once defined, the Home Position is available when creating a robot program. You can use the Home Position to define a Safe Home Position.(See 21.18. Safe Home Position on page 135) Use the Home screen buttons for the following: •... -
Page 234: Defining A Conveyor
24. Installation Tab 24.14.1. Defining a Conveyor 1. In the Header, tap Installation. 2. Under General, select Conveyor Tracking. 3. Under Conveyor Tracking Setup, in the dropdown list select Conveyor 1 or Conveyor 2. You can only define one conveyor at a time. 4. -
Page 235: Screwdriving Setup
24. Installation Tab 24.15. Screwdriving Setup The Screwdriving Setup provides options for configuring the robot to work with an industrial screwdriver or an industrial nutrunner. You can setup the screwdriver’s position with respect to the robot’s tool flange and electrical interface. 24.15.1. - Page 236 24. Installation Tab • Configure the Position to be the tip of the screwdriver tool where it contacts the screw. • Configure the Orientation so that the positive Z direction is aligned to the length of the screws to be tightened. You can visualize the X, Y and Z coordinates of the selected TCP to confirm it matches the tool’s bit or socket.
-
Page 237: Configuring The Screwdriver Interface
24. Installation Tab 24.15.3. Configuring the Screwdriver Interface 1. Use the Interface drop-down menu at the top of the screen to change the displayed content based on signal type. 2. Under Input, configure the signals that the robot receives from the screwdriver: •... - Page 238 24. Installation Tab A Feature represents an object defined by a six dimensional pose (position and orientation) relative to the robot base. You can name a feature for future reference. Some subparts of a robot program consist of movements executed relative to specific objects other than the base of the robot arm.
-
Page 239: Using A Feature
24. Installation Tab Selecting a feature depends on the type of object being used and the precision requirements. Use the Line feature and Plane feature where possible as they are based on more input points. More input points mean higher precision. For example, you can accurately define the direction of a linear conveyor, by defining two points of a Line feature with as much physical separation as possible. -
Page 240: Line Feature
24. Installation Tab Adding a Point 1. In Installation, select Features. 2. Under Features select Point. 24.17.4. Line feature The line feature defines lines that the robot needs to follow. (e.g., when using conveyor tracking). A line l is defined as an axis between two point features p1 and p2 as shown in figure 13.3. Adding a Line 1. -
Page 241: Plane Feature
24. Installation Tab In figure 13.3 the axis directed from the first point towards the second point, constitutes the y-axis of the line coordinate system. The z-axis is defined by the projection of the z-axis of p1 onto the plane perpendicular to the line. The position of the line coordinate system is the same as the position of p1. -
Page 242: Example: Manually Updating A Feature To Adjust A Program
24. Installation Tab NOTE You can re-teach the plane in the opposite direction of the x-axis, if you want that plane to be normal in the opposite direction. Modify an existing plane by selecting Plane and pressing Modify Plane. You will then use the same guide as for teaching a new plane. -
Page 243: Example: Dynamically Updating A Feature Pose
24. Installation Tab 13.4: Simple program with four waypoints relative to a feature plane manually updated by changing the feature The application requires the program to be reused for multiple robot installations where the position of the table varies slightly. The movement relative to the table is identical. By defining the table position as a feature P1 in the installation, the program with a MoveL command configured relative to the plane can be easily applied on additional robots by just updating the installation with the actual position of the table. - Page 244 24. Installation Tab y = 0.01 o = p[0,y,0,0,0,0] P1_var = pose_trans(P1_var, o) MoveL # Feature: P1_var 13.6: Applying an offset to the plane feature Robot Program MoveJ if (digital_input[0]) then P1_var = P1 else P1_var = P2 MoveL # Feature: P1_var 13.7: Switching from one plane feature to another UR5e User Manual...
-
Page 245: Feature Edit
24. Installation Tab The movement relative to P1 is repeated a number of times, each time by an offset o. In this example the offset is set to 10 cm in the Y-direction (see figure 13.6, offsets O1 and O2). This is achieved using pose_add() or pose_trans() script functions to manipulate the variable. -
Page 246: Fieldbus
24. Installation Tab 1. In Installation, tap Features. 2. Under Features, select Point to add a point to your program tree. 3. Tap Edit to access the Edit screen to make changes to the position and rotation of the point Editing a Line The line appears as two points in your program tree. -
Page 247: Modbus Client I/O Setup
24. Installation Tab 24.19. MODBUS Client I/O Setup Here, the MODBUS client (master) signals can be set up. Connections to MODBUS servers (or slaves) on specified IP addresses can be created with input/output signals (registers or digital). Each signal has a unique name so it can be used in programs. 24.19.1. -
Page 248: Sequential Mode
24. Installation Tab 24.19.5. Sequential mode Available only when Show Advanced Options (see 24.19.13. Show Advanced Options on page 236) is selected. Selecting this checkbox forces the modbus client to wait for a response before sending the next request. This mode is required by some fieldbus units. Turning this option on may help when there are multiple signals, and increasing request frequency results in signal disconnects. -
Page 249: Set Signal Address
24. Installation Tab 24.19.9. Set signal address This field shows the address on the remote MODBUS server. Use the on-screen keypad to choose a different address. Valid addresses depends on the manufacturer and configuration of the remote MODBUS unit. 24.19.10. Set signal name Using the on-screen keyboard, the user can give the signal a name. -
Page 250: Show Advanced Options
24. Installation Tab 24.19.13. Show Advanced Options This check box shows/hides the advanced options for each signal. 24.19.14. Advanced Options Update Frequency This menu can be used to change the update frequency of the signal. This means the frequency with which requests are sent to the remote MODBUS unit for either reading or writing the signal value. - Page 251 24. Installation Tab Those actions are: None PolyScope ignores the loss of EtherNet/IP connection and the program continues to run. Pause PolyScope pauses the current program. The program resumes from where it stopped. Stop PolyScope stops the current program. User Manual UR5e...
- Page 252 24. Installation Tab UR5e User Manual...
-
Page 253: Move Tab
25. Move Tab 25. Move Tab On this screen, you can move (jog) the robot arm directly, either by translating/rotating the robot tool, or by moving robot joints individually. 25.1. Move Tool Hold down any of the Move Tool arrows to move the robot arm in a particular direction. •... -
Page 254: Feature
25. Move Tab boundary limit is visualized with a spherical cone together with a vector indicating the current orientation of the robot tool. The inside of the cone represents the allowed area for the tool orientation (vector). When the robot TCP is no longer in proximity of the limit, the 3D representation disappears. If the TCP is in violation or very close to violating a boundary limit, the visualization of the limit turns red. -
Page 255: Pose Editor Screen
25. Move Tab WARNING 1. In the Setup tab, if the gravity setting (see 24.4. Mounting on page 210) is wrong, or the robot arm carries a heavy load, the robot arm can start moving (falling) when you press the Freedrive tab. In that case, release Freedrive again. - Page 256 25. Move Tab Robot The 3D image shows the current Robot Arm position. The shadow shows the Robot Arm target position controlled by the specified values on the screen. Press the magnifying glass icons to zoom in/out or drag a finger across it to change the view. If the specified target position of the robot TCP is close to a safety or trigger plane, or the orientation of robot tool is near the tool orientation boundary limit (see 21.11.
- Page 257 25. Move Tab • Tap the joint position to edit the values. • Tap the + or - buttons to the right of a box to add or subtract an amount to/from the current value. • Hold down a button to directly increase/decrease the value. OK Button If you activate this screen from the Move screen (see 25. Move Tab on...
- Page 258 25. Move Tab UR5e User Manual...
-
Page 259: I/O Tab
26. I/O Tab 26. I/O Tab 26.1. Robot On this screen you can always monitor and set the live I/O signals from/to the robot control box. The screen displays the current state of the I/O, including during program execution. If anything is changed during program execution, the program will stop. -
Page 260: Modbus
26. I/O Tab Tool Communication Interface When the Tool Communication Interface TCI is enabled, the tool analog input becomes unavailable. On the I/O screen, the Tool Input field changes as illustrated below. NOTE When the Dual Pin Power is enabled, the tool digital outputs must be named as follows: •... - Page 261 26. I/O Tab User Manual UR5e...
- Page 262 26. I/O Tab UR5e User Manual...
-
Page 263: Log Tab
27. Log Tab 27. Log Tab The Log tab displays information about the robot arm and Control Box. 27.1. Readings and Joint Load The Readings pane displays Control Box information. The Joint Load pane displays information for each robot arm joint. Each joint displays: •... -
Page 264: Saving Error Reports
27. Log Tab Message Severity You can filter messages by selecting the toggle buttons that correspond to the severity of the log entry or by whether an attachment is present. The following table describes message severity. Provides general information, such as status of a program, changes of the controller and controller version. -
Page 265: Technical Support File
27. Log Tab 27.4. Technical Support File The report file contains information that is helpful to diagnose and reproduce issues. The file contains records of previous robot failures, as well as current robot configurations, programs and installations. The report file can be saved to external USB drive. On the Log screen, tap Support file and follow the on-screen instructions to access the function. - Page 266 27. Log Tab UR5e User Manual...
-
Page 267: Program And Installation Manager
28. Program and Installation Manager 28. Program and Installation Manager The Program and Installation Manager refers to three icons that allow you to create, load and configure Programs and Installations: New..., Open... and Save..The File Path displays your current loaded Program name and the type of Installation. File Path changes when you create or load a new Program or Installation. -
Page 268: New
28. Program and Installation Manager 1. In the Program and Installation Manager, tap Open... and select Installation. 2. On the Load Robot Installation screen, select an existing installation and tap Open. 3. In the Safety Configuration box, select Apply and restart to prompt robot reboot. 4. -
Page 269: Save
28. Program and Installation Manager 1. In the Program and Installation Manager, tap New... and select Installation. 2. Tap Confirm Safety Configuration. 3. On the Installation screen, configure your new installation as desired. 4. In the Program and Installation Manager, tap Save... and select Save Installation As... 5. -
Page 270: File Manager
28. Program and Installation Manager 28.4. File manager This image shows the load screen which consists of the following buttons: Breadcrumb Path The breadcrumb path shows a list of directories leading to the present location. By selecting a directory name in the breadcrumb, the location changes to that directory and displays it in the file selection area. - Page 271 28. Program and Installation Manager media is attached to the USB port. User Manual UR5e...
- Page 272 28. Program and Installation Manager UR5e User Manual...
-
Page 273: Hamburger Menu
29. Hamburger menu 29. Hamburger menu 29.1. Help You can find definitions for all elements that make up PolyScope capabilities. 1. In the right corner of the Header, tap the Hamburger menu and select Help. 2. Tap one of the red question marks that appears, to define desired element. 3. -
Page 274: Password
29. Hamburger menu 4. Tap Apply and Restart to apply your changes. Date and Time are displayed in the Log tab (see 27.2. Date Log on page 249) under Date Log. Hiding Speed Slider Located at the base of the Run tab screen, the Speed Slider allows the operator to change the speed of a running Program. -
Page 275: System
29. Hamburger menu 29.4. System 29.4.1. Backup and Restore Save a full copy of your system to a USB drive and use it to restore your system back to a previous state. This may be necessary after disk corruption or accidental deletion. NOTE Use one of the USB ports inside the Control Box (CB) when doing a Backup and Restore operation. -
Page 276: Network
29. Hamburger menu Updating Software 1. In the Header, tap the Hamburger menu icon and select Settings. 2. Under System, tap Update. 3. Insert an USB and tap Search to list valid update files. 4. In the list of valid update files, select desired version and tap Update to install. WARNING Always check your program/s after a software upgrade. -
Page 277: Remote Control
29. Hamburger menu Details about the new URCap appear in the Active URCaps field. A status icon indicates the state of the URCap, as listed below: • URCap ok: The URCap is installed and running normally. • URCap fault: The URCap is installed but unable to start. Contact the URCap developer. •... -
Page 278: Security
29. Hamburger menu NOTE • Although Remote Control limits your actions in PolyScope, you can still monitor robot state. • When a robot system is powered off in Remote Control, it starts up in Remote Control. 29.4.6. Security General General allows you to configure Magic Files and to configure network access to the robot. Magic files A Magic File is a script on a USB drive that executes once it is inserted into the system. -
Page 279: Configure Inbound Connections
29. Hamburger menu Leave the field blank to avoid blocking ports. Any enabled service (refer to Settings->Security- >Services) will take precedence over port blocking. WARNING URCaps may require particular network interfaces to be open in order to function. • Consult your URCaps vendor/s, if any of your URCaps require particular network interfaces (ports/services) to be open. -
Page 280: Authentication
29. Hamburger menu • Select Enable SSH Access. • Select to enable/disable Allow Port Forwarding (when in remote control mode). Port forwarding is only available in remote control mode. Port forwarding is a recommended technique for wrapping open interfaces (eg. the Dashboard service) in a secure and encrypted tunnel requiring authentication. - Page 281 29. Hamburger menu Shutting Down the Robot 1. In the Header, tap the Hamburger menu and select Shutdown Robot. 2. When the Shutdown Robot dialog box appears, tap Power Off. User Manual UR5e...
-
Page 282: Glossary
30. Glossary 30. Glossary Stop Category 0 Robot motion is stopped by immediate removal of power to the robot. It is an uncontrolled stop, where the robot can deviate from the programmed path as each joint brake as fast as possible. This protective stop is used if a safety-related limit is exceeded or in case of a fault in the safety-related parts of the control system. -
Page 283: Index
30. Glossary Collaborative robot application The term collaborative refers to collaboration between operator and robot in a robot application. See precise definitions and descriptions in ISO 10218-1 and ISO 10218-2. Safety configuration Safety-related functions and interfaces are configurable through safety configuration parameters. These are defined through the software interface, see part Part II PolyScope Manual on page 97. - Page 284 30. Glossary Conveyor Tracking Setup 219 Custom 122 Delete 126 Direction Vector 162 Disabled 125, 127 Disabled Tool direction limit 131 Edit Position 129 Elbow 65, 99 Elbow Force 123 Elbow Speed 123 Error 193 Ethernet 32, 232 EtherNet/IP 32, 211, 236 Expression Editor 176 Factory Presets 122 Feature 220, 224, 240...
- Page 285 30. Glossary General purpose I/O 36 Hamburger Menu 102 Header 99 Home 240 I/O 32, 37, 101, 132, 211, 213, 245 Initialize 102, 104 input signals 132 Installation 101, 253-254 Installation variables 214 integrator 12 Joint Limits 124 joint space 152 Log 101, 249 Manual High Speed 102, 117 Manual mode 115...
- Page 286 30. Glossary Mini Displayport 32 MODBUS 32, 220, 232-233, 235, 246 mode Automatic 101, 116 Local 101 Manual 101, 116 Remote 101 Modes 22, 125 Momentum 122 Motion 188 Mounting bracket 2 Move 101, 115, 152-153, 166, 243 Move robot to 141 Move Tool 239 MoveJ 152, 225, 243 MoveL 152, 225, 243...
- Page 287 30. Glossary Pan angle 132 Play 102, 140 Point 188 PolyScope 1, 23, 99, 102, 105, 135, 139, 170, 205, 232, 237, 259, 264 popup 167 Pose Editor 240-241 Position 129 Position range 124 Power 122 Program 101, 139, 190, 253-254 Program and Installation Manager 101, 253 program node 143 Program Node 149...
- Page 288 30. Glossary robot cable 47-48 Robot Limits 121 Robot Moving 133 Robot Not Stopping 133 Robot Program Node 149 Run 100, 139 safe Home 134 Safeguard Reset 133 Safety Checksum 101, 121 Safety Configuration 13, 119-121, 124 Safety functions 17-18 Safety I/O 17, 22, 36-37 Safety instructions 55 Safety planes 125, 239, 242 Safety Settings 7, 119, 260...
- Page 289 30. Glossary stopped state 104 Stopping Distance 122 Stopping Time 122 Success 193 Switch Case construction 176 System Emergency stop 132 System Emergency Stop 133 TCI 165 Teach Pendant 2, 30, 44, 99, 103, 135, 189, 263 Templates 190 Test button 189 Tilt angle 132 Tool 129 Tool Center Point 123, 154, 205, 240...
- Page 290 30. Glossary Until Tool Contact 163 UR Forums 3 UR+ 3 UR+ Partner Program 3 URCaps 262 Variable feature 154 Variable waypoint 154 Variables 139, 151 Voltage 245 Wait 165 Warning signs 8 Warranty 63 Waypoint 152, 154-156, 161 Waypoints 105 Wrist 99 UR5e User Manual...
- Page 291 30. Glossary Software Version: 5.11 Document Version: User Manual UR5e...
Need help?
Do you have a question about the E Series and is the answer not in the manual?
Questions and answers