User Manuals: YASKAWA Sigma-7-S Series Servo Motor
Manuals and User Guides for YASKAWA Sigma-7-S Series Servo Motor. We have 2 YASKAWA Sigma-7-S Series Servo Motor manuals available for free PDF download: Product Manual

YASKAWA Sigma-7-S Series Product Manual (561 pages)
SERVOPACK with MECHATROLINK-III Communications References, AC Servo Drive
Brand: YASKAWA
|
Category: Servo Drives
|
Size: 10 MB
Table of Contents
-
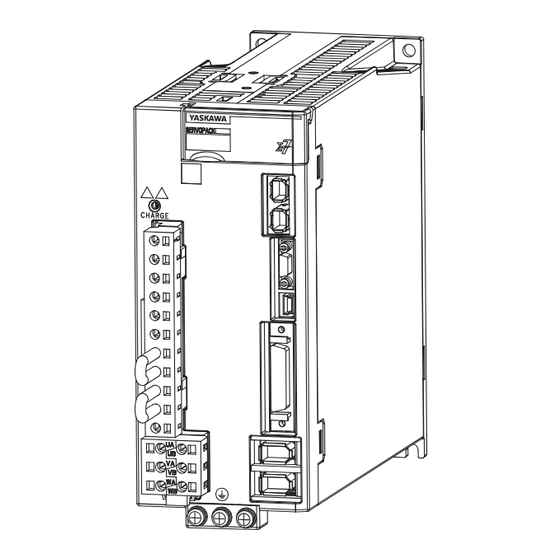
Part Names42
-
Functions51
-
Functions61
-
Holding Brake166
-
-
Preparations182
-
Applicable Tools183
-
-
Software Limits216
-
-
-
Linear Encoder233
-
Software Reset237
-
Preparations237
-
Applicable Tools237
-
-
-
Preparations240
-
Applicable Tools241
-
-
-
Preparations259
-
Applicable Tools260
-
-
-
Precautions264
-
Preparations264
-
-
-
Program Jogging266
-
Origin Search271
-
-
-
Tuning279
-
-
-
Tuning Functions283
-
Diagnostic Tool284
-
-
-
Outline294
-
Restrictions294
-
Applicable Tools295
-
-
Custom Tuning320
-
-
Outline334
-
Preparations335
-
Applicable Tools335
-
-
Manual Tuning359
-
Diagnostic Tools374
-
Easy FFT376
-
Easy FFT377
-
Monitoring380
-
Alarm Tracing395
-
-
-
Risk Assessment409
-
Related Commands412
-
Stopping Methods414
-
-
-
-
Procedure417
-
-
-
Maintenance420
-
-
Alarm Displays424
-
Warning Displays468
-
Parameter Lists488
-
-
Appendices550
-
Advertisement
YASKAWA Sigma-7-S Series Product Manual (111 pages)
SERVOPACK with Hardware Option Specifications Dynamic Brake
Brand: YASKAWA
|
Category: Servo Drives
|
Size: 2 MB
Table of Contents
-
Warranty25
-
Part Names
36 -
Precautions
53 -
Outline
78 -
-
Maintenance84
-
-
Index
109 -
Revision History
110
Advertisement