YASKAWA A1000 Series Manual
- Technical manual (628 pages) ,
- Quick start manual (358 pages) ,
- Installation manual (70 pages)
Advertisement
Product Overview
About This Product
The PG-X3 Option allows the user to connect an incremental line driver encoder (PG) for motor speed feedback to the drive and take advantage of the V/f with PG, Closed Loop Vector, and Closed Loop Vector for PM motors control modes. The option helps increase the control accuracy and performance.
This PG signal allows the drive to compensate for subtle variations in the load, while providing the drive with the necessary data to control the output frequency and maintain an accurate constant speed.
The PG-X3 Option reads a maximum input frequency from the PG of 300 kHz. Be sure to select a PG with an output of maximum 300 kHz when operating at maximum speed.
Note: This option cannot be used with an open collector encoder. Use option PG-B3 with open collector encoders.
Applicable Models
The option can be used with the drive models in Table 1.
Table 1 Applicable Models
| Drive Series | Drive Model Number |
| A1000 | All models |
| L1000A | All models |
Receiving
Please perform the following tasks upon receipt of the option:
- Inspect the option for damage. Contact the shipper immediately if the option appears damaged.
- Verify receipt of the correct model by checking the model number printed on the name plate of the option. (Refer to Figure 1 for more information)
- Contact your supplier if you have received the wrong model or the option does not function properly.
Option Package Contents

Tools Required for Installation
- A Phillips screwdriver (M3 metric/#1, #2 U.S. standard size) is required to install the option.
- A straight-edge screwdriver (blade depth: 0.6 mm (1/32"), width: 3.5 mm (1/8")) is required to wire the option terminal block.
- A pair of diagonal cutting pliers.
- A small file or medium-grit sandpaper.
Note: Tools required to prepare option cables for wiring are not listed in this manual.
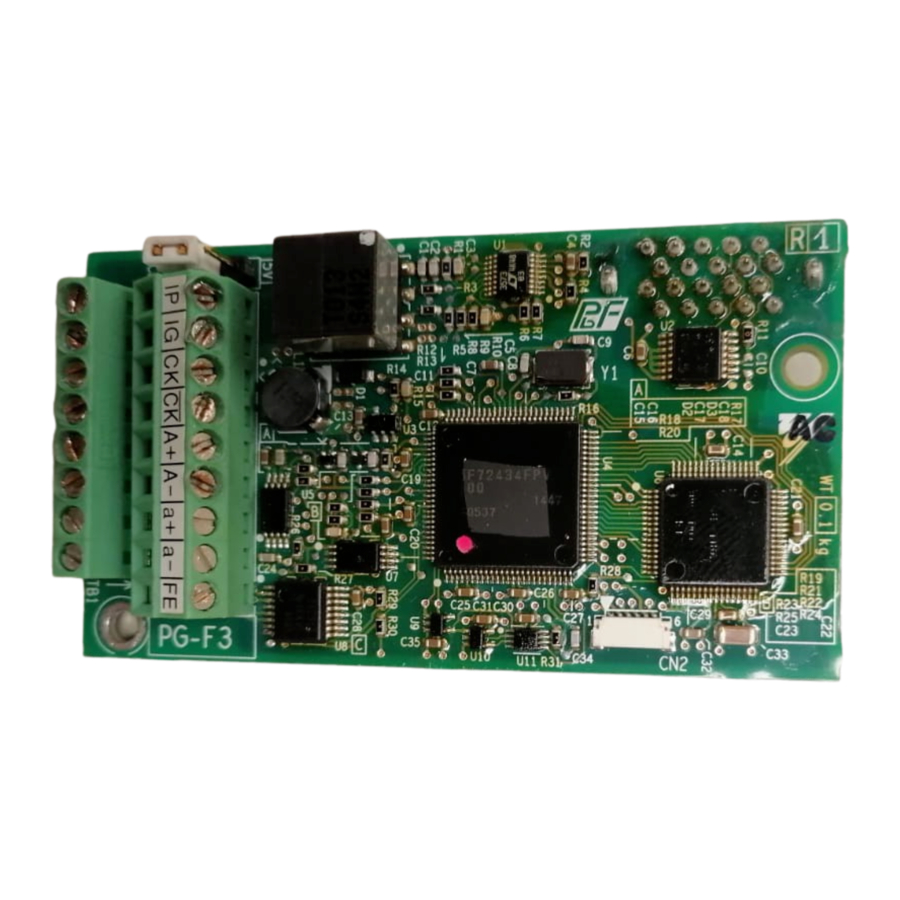
Option Components
PG-X3 Option
Figure 1 PG-X3 Option Components

- Terminal block TB1
- Jumper for PG power supply voltage (CN3)<1>
- Model number
- Connector (CN5)
- Installation hole
- Terminal block TB2
- Ground terminal (installation hole)<2>
- Refer to Table 2 for detail.
- Terminal for ground wire packaged with the option card
Terminal Blocks TB1 and TB2
Refer to Table 5 for details on TB1 and TB2 terminal functions and signal levels.

Installation Procedure
Section Safety

Electric Shock Hazard
Do not connect or disconnect wiring while the power is on.
Before wiring terminals, disconnect all power to the equipment. The internal capacitor remains charged even after the power supply is turned off. After shutting off the power, wait at least the amount of time specified on the drive before touching any components.

Electrical Shock Hazard
Do not remove the front cover of the drive while the power is on.
Failure to comply could result in death or serious injury.
The diagrams in this section may include options and drives without covers or safety shields to show details. Be sure to reinstall covers or shields before operating any devices. Use the option according to the instructions described in this manual.
Do not allow unqualified personnel to use equipment.
Failure to comply could result in death or serious injury.
Maintenance, inspection, and replacement of parts must be performed only by authorized personnel familiar with installation, adjustment, and maintenance of this product.
Do not touch circuit boards while the power to the drive is on.
Failure to comply could result in death or serious injury.
Do not use damaged wires, stress the wiring, or damage the wire insulation.
Failure to comply could result in death or serious injury.

Fire Hazard
Tighten all terminal screws to the specified tightening torque.
Loose electrical connections could result in death or serious injury by fire due to overheating of electrical connections.
NOTICE
Damage to Equipment
Observe proper electrostatic discharge (ESD) procedures when handling the option, drive, and circuit boards.
Failure to comply may result in ESD damage to circuitry.
Never shut the power off while the drive is running or outputting voltage.
Failure to comply may cause the application to operate incorrectly or damage the drive.
Do not operate damaged equipment.
Failure to comply may cause further damage to the equipment.
Do not connect or operate any equipment with visible damage or missing parts.
Do not use unshielded cable for control wiring.
Failure to comply may cause electrical interference resulting in poor system performance.
Use shielded twisted-pair wires and ground the shield to the ground terminal of the drive.
Properly connect all pins and connectors.
Failure to comply may prevent proper operation and possibly damage equipment.
Check wiring to ensure that all connections are correct after installing the option and connecting any other devices.
Failure to comply may result in damage to the option.
Prior to Installing the Option
Prior to installing the option, wire the drive, make the necessary connections to the drive terminals, and verify that the drive functions normally. Refer to the Quick Start Guide packaged with the drive for information on wiring and connecting the drive.
Figure 2 shows an exploded view of the drive with the option and related components for reference.

Figure 2 Drive Components with Option
- Insertion point for CN5
- Option card
- Included screws
- Front cover
- Digital operator
- Terminal cover
- Removable tabs for wire routing
- Ground wire
- Drive grounding terminal (FE)
- Connector CN5-A
- Connector CN5-B
- Connector CN5-C
Installing the Option
Remove the front covers of the drive before installing the option. Refer to the drive manual for directions on removing the front covers. Cover removal varies depending on drive size.
- Shut off power to the drive, wait the appropriate amount of time specified on the drive for voltage to dissipate, then remove the digital operator (E) and front covers (D, F).
![]()
Electrical Shock Hazard. Do not connect or disconnect wiring while the power is on. Before wiring terminals, disconnect all power to the equipment. The internal capacitor remains charged even after the power supply is turned off. After shutting off the power, wait at least the amount of time specified on the drive before touching any components.

- Insert the option (B) into the CN5-B (K) or CN5-C (L) connectors located on the drive and fasten it into place using one of the included screws (C).
Use the CN5-C connector (L) when connecting only one option to the drive; use both CN5-B and CN5-C when connecting two options.
Connect one of the ground wires (H) to the ground terminal (I) using one of the remaining screws (C). Connect the other end of the ground wire (H) to the remaining ground terminal and installation hole on the option using the last remaining provided screw (C).

Note:- The option package includes two ground wires. Use the longer wire when plugging the option into connector CN5-C on the drive side. Use the shorter wire when plugging the option into connector CN5-B. Refer to Option Package Contents for more information.
- There are two screw holes on the drive for use as ground terminals. When connecting three options, two ground wires will need to share the same drive ground terminal.
- Route the option wiring.
Depending on the drive model, some drives may require routing the wiring through the side of the front cover to the outside. In these cases, cut out the perforated openings on the left side of the drive front cover as shown in Figure 5 (A) and leave no sharp edges to damage wiring.
Route the wiring inside the enclosure as shown in Figure 5 (B) for drives that do not require routing through the front cover.
For more information, refer to the Peripheral Devices & Options section of Yaskawa AC Drive Technical Manual in your application.

Figure 5 Wire Routing Examples- Route wires through the openings provided on the left side of the front cover.<1>
- Use the open space provided inside the drive to route option wiring.
- The drive will not meet NEMA Type 1 requirements if wiring is exposed outside the enclosure.
- Prepare wire ends as shown in Figure 6. Refer to Wire Gauges and Tightening Torques to confirm that the proper tightening torque is applied to each terminal. Take particular precaution to ensure that each wire is properly connected and wire insulation is not accidentally pinched into electrical terminals.
![]()
Fire Hazard. Tighten terminal screws to the specified tightening torque. Loose electrical connections could result in death or serious injury by fire due to overheating. Tightening screws beyond the specified tightening torque may cause erroneous operation, damage the terminal block, or cause a fire.
NOTICE: Heat shrink tubing or electrical tape may be required to ensure that cable shielding does not contact other wiring. Insufficient insulation may cause a short circuit that can damage the option or drive.

- Wire the motor PG encoder to the terminal block on the option. Refer to Figure 7 for wiring instructions.
Refer to Option Terminal Functions for a detailed description of the option board terminal functions.
Parameter Settings and Connections for Different Encoder Types- Connecting a Single-Channel Encoder
When using a single-channel encoder in V/f with PG control mode, connect the pulse output from the PG to the option and set drive parameter F1-21 to 0. - Connecting a Two-Channel Encoder
When using a two-channel encoder, connect the A and B pulse outputs on the PG to the option and set F1-21 to 1.
When using a two-channel encoder in Closed Loop Vector control mode, connect pulse outputs A and B from the encoder to the corresponding terminals on the option. - Connecting a Two-Channel Encoder with Z Marker Pulse
When using a two-channel encoder with Z marker pulse, connect the A channel, B channel, and Z pulse outputs to the corresponding terminals on the option.
Control Method V/f with PG Closed Loop Vector No. of Encoders 1 CN5-C 2 CN5-B 1 CN5-C 2 CN5-B Single Channel (A) F1-21 = 0 F1-37 = 0 N/A N/A Two Channel (AB Quadrature) F1-21 = 1 F1-37 = 1 No setting required No setting required Two Channel with Marker (ABZ) F1-21 = 1 F1-37 = 1 No setting required No setting required 
- Connecting a Single-Channel Encoder





- Ground the shield on the PG side and the drive side. If noise problems arise in the PG signal, remove the shield ground from one end of the signal line or remove the shield ground connection on both ends.
- Set the voltage for the PG power supply using jumper CN3 located on the option. Position the jumper as shown in Table 2 to select the voltage level.
NOTICE: The positioning of jumper CN3 selects the PG power supply voltage (5.5 V or 12 V). Select the voltage level for the PG connected to the option and motor. If the wrong voltage is selected, the PG may not operate properly or may become damaged as a result.
Table 2 Setting PG Power Supply Voltage (IP) with Jumper CN3Voltage Level 5.5 V ± 5% (default) 12.0 V ± 5% Jumper CN3 ![]()
![]()
- Replace and secure the front covers of the drive (D, F) and replace the digital operator (E).

Note: Take proper precautions when wiring the option so that the front covers will easily fit back onto the drive. Make sure cables are not pinched between the front covers and the drive when replacing the covers. - Set drive parameters for proper motor rotation.
With a two-channel or three-channel encoder, the leading pulse determines the motor rotation direction. A PG signal with leading A pulse is considered to be rotating forward (counter-clockwise when viewing rotation from motor load side).

After connecting the PG outputs to the option, apply power to the drive and manually rotate the motor and check the rotation direction by viewing monitor U1-05 on the digital operator.
Reverse motor rotation is indicated by a negative value for U1-05; forward motor rotation is indicated by a positive value.
If monitor U1-05 indicates that the forward direction is opposite of what is intended, reverse the two A channel wires with the two B channel wires on option terminal TB1 as shown in Figure 10.

If switching the wires is inconvenient, set drive parameter F1-05/F1-32 to 1 to switch the direction of how the option reads pulses from the PG output.
Please note that when the drive is initialized using A1-03 =1110, 2220, 3330, the value for F1-05/F1-32 will reset to factory default and the parameter will need to be adjusted again to switch the direction.





Wire Gauges, Tightening Torque, and Crimp Terminals
Wire gauge and torque specifications are listed in Table 3. Yaskawa recommends using crimp terminals with the specifications listed in Table 4 to facilitate wiring and ensure proper connection.
Table 3 Wire Gauges and Tightening Torques
| Terminal Signal | Screw Size | Tightening Torque Nxm (in-lb) | Bare Cable | Crimp Terminals | Wire Type | ||
| Applicable Gauges mm2 (AWG) | Recomm. Gauge mm2 (AWG) | Applicable Gauges mm2 (AWG) | Recomm. Gauge mm2 (AWG) | ||||
| A+, A–, B+, B–, Z+, Z–, SD, FE, IP, IG | M2 | 0.22 to 0.25 (1.95 to 2.21) | Stranded wire: 0.25 to 1.0 (24 to 17) Solid wire: 0.25 to 1.5 (24 to 16) | 0.75 (18) | 0.25 to 0.5 (24 to 20) | 0.5 (20) | Shielded twisted pair, etc. |
| a+, a–, b+, b–, z+, z–, SG | Shielded cable, etc. | ||||||
Crimp Terminals
Yaskawa recommends using CRIMPFOX 6 by Phoenix Contact or equivalent to crimp the terminal ends.
Note: Properly trim wire ends so loose wire ends do not extend from the crimp terminals.
Table 4 Crimp Terminal Sizes
| Wire Gauge mm2 (AWG) | Phoenix Contact Model | L mm (in) | d1 mm (in) | d2 mm (in) | |
 | 0.25 (24) | AI 0.25 - 6YE | 10.5 (13/32) | 0.8 (1/32) | 2 (5/64) |
| 0.34 (22) | AI 0.34 - 6TQ | 10.5 (13/32) | 0.8 (1/32) | 2 (5/64) | |
| 0.5 (20) | AI 0.5 - 6WH | 14 (9/16) | 1.1 (3/64) | 2.5 (3/32) |
Terminal Functions
Table 5 Option Terminal Functions
| Terminal Block | Terminal | Function | Description |
| TB1 | A+ | A pulse signal input |
|
| A– | A inverse pulse signal input | ||
| B+ | B pulse signal input | ||
| B– | B inverse pulse signal input | ||
| Z+ | Z pulse signal input | ||
| Z– | Z inverse pulse signal input | ||
| SD | NC pin (open) | Open connection port for use when cable shields should not be grounded | |
| FE | Ground | Used as the shield ground termination point. | |
| TB2 | IP | PG power supply |
|
| IG | PG power supply common | ||
| SG | Monitor signal common |
| |
| a+ | A pulse monitor signal | ||
| a– | A pulse inverse monitor signal | ||
| b+ | B pulse monitor signal | ||
| b– | B pulse inverse monitor signal | ||
| z+ | Z pulse monitor signal | ||
| z– | Z pulse inverse monitor signal |
- A separate power supply is needed if the PG requires more than 200 mA to operate. Select a UL-listed class 2 power supply.
Related Parameters
The following parameters are used to set up the drive for operation with the option. Set parameters as needed. Parameter setting methods can be found in the drive Quick Start Guide or Technical Manual.
Table 6 Related Parameters
| No. (Addr. Hex) | Name | Description | Control Method | Values |
| A1-02 (102) | Control Method Selection |
| All Modes | Default: <1> Range: <1> |
| F1-01 (380) <2> <3> | PG 1 Pulses per Revolution | Sets the pulses to be read from the pulse generator. | V/f w/PG CLV CLV/PM | Default: <1> Min: <1> Max: <1> |
| F1-02 (381) | PG Feedback Loss Operation Selection | Sets the stopping method when the PG becomes disconnected (PGo).
| V/f w/PG CLV CLV/PM | Default: 1 Range: <1> |
| F1-03 (382) | PG Overspeed Operation Selection | Sets the stopping method when overspeed is detected.
| V/f w/ PG CLV CLV/PM | Default: 1 Range: 0 to 3 |
| F1-04 (383) | PG Deviation Operation Selection | 0: Ramp to stop (decelerates at time set to C1-02) 1: Coast to stop 2: Fast Stop (decelerates at the time set to C1-09) 3: Continue running Note: Due to potential damage to the motor and machinery, only use the "Continue running" setting under special circumstances. | V/f w/PG CLV CLV/PM AOLV/PM | Default: <1> Range: 0 to 3 |
| F1-05 (384) <3> | PG 1 Rotation |
| V/f wPG CLV CLV/PM | Default: <1> Range: 0, 1 |
| F1-06 (385) <3> | PG 1 Ratio for PG Pulse Monitor | Sets the division ratio for pulses output from the PG encoder. Set as a three-digit number: x is the first digit, y is the second digit, and z is the third digit: When only the A pulse is read, this ratio is disabled and pulses are set as 1/32 to 1. | V/f w/PG CLV CLV/PM | Default: 1 Min: 1 Max: 132 |
| F1-08 (387) | PG Overspeed Level | Sets the level for detecting overspeed as a percentage of the maximum output frequency. | V/f w/ PG CLV CLV/PM AOLV/PM | Default: 115 Min: 0 Max: 120 |
| F1-09 (388) | Overspeed Det. Time | Sets the time required for the motor to exceed the the level set in F1-08 to trigger a fault. | V/f w/ PG CLV CLV/PM AOLV/PM | Default: <4> Min: 0.0 Max: 2.0 |
| F1-10 (389) | Excessive Speed Deviation Det. Level | Sets the degree of speed deviation to trigger a dEv fault. Set as a percentage of the maximum output frequency. | V/f w/PG CLV CLV/PM AOLV/PM | Default: 10 Min: 0 Max: 50 |
| F1-11 (38A) | Excessive Speed Deviation Det. Time | Sets the time required a speed deviation situation to trigger a fault. | V/f w/ PG CLV CLV/PM AOLV/PM | Default: 0.5 Min: 0.0 Max: 10.0 |
| F1-12 (38B) <3><5> | PG 1 Gear Teeth 1 | Number of gear teeth between the PG and motor. A gear ratio of 1 will be used if any of these parameters is set to 0. | V/f w/ PG | Default: 0 Min: 0 Max: 1000 |
| F1-13 (38C) <3><5> | PG 1 Gear Teeth 2 | |||
| F1-14 (38D) | PG Disconnect Det. Time | Sets the time in seconds for PG disconnect to be detected. | V/f w/ PG CLV CLV/PM | Default: 2.0 Min: 0.0 Max: 10.0 |
| F1-18 (3AD) <3> | Reverse Rotation Det. for PG 1 | 0: Disabled n: Number of times a dv3 situation must be detected to trigger a fault. | CLV/PM | Default: 10 Min: 0 Max: 10 |
| F1-19 (3AE) <3> | Reverse Rotation Det. for PG 1 | 0: Disabled n: Number of times a dv4 situation must be detected to trigger a fault. | CLV/PM | Default: 128 Min: 0 Max: 5000 |
| F1-20 (3B4) <3> | PG 1 Hardware Disconnect |
| V/f w/ PG CLV CLV/PM | Default: 1 Range: 0, 1 |
| F1-21 (3BC) <3> | PG 1 Option Function |
| V/f w/ PG | Default: 0 Range: 0, 1 |
| F1-30 (3AA) <6> | Motor 2 PG Connector | Selects the connector for the PG option connected to motor 2.
| V/f w/ PG CLV | Default: 1 Range: 0, 1 |
| F1-31 (3B0) <2><7> | PG 2 Pulse Setting | Sets the pulses to be read from the pulse generator. | V/f w/ PG CLV | Default: 1024 Min: 0 Max: 60000 |
| F1-32 (3B1) <7> | PG 2 Rotation |
| V/f w/ PG CLV | Default: 0 Range: 0, 1 |
| F1-33 (3B2) <5><7> | PG 2 Gear Teeth 1 | Number of gear teeth between the PG and motor. A gear ratio of 1 will be used if any of these parameters is set to 0. | V/f w/ PG | Default: 0 Min: 0 Max: 1000 |
| F1-34 (3B3) <5><7> | PG 2 Gear Teeth 2 | |||
| F1-35 (3BE) <7> | PG 2 Division Ratio for Pulse Monitor | Sets the division ratio for the pulses output from the PG encoder. Set as a three-digit number where x is the first digit, y is the second digit, and z is the third digit: When only the A pulse is read, this ratio is disabled and pulses are set as 1/32 to 1. | V/f w/ PG CLV | Default: 1 Min: 1 Max: 132 |
| F1-36 (3B5) <7> | PG 2 Hardware Disconnect |
| V/f w/ PG CLV | Default: 1 Range: 0, 1 |
| F1-37 (3BD) <7> | PG 2 Option Function |
| V/f w/ PG | Default: 0 Range: 0, 1 |
- Veries by drive models.
- The number of output pulses for the PG can be calculated as follows:
![]()
- The parameter is available only for the drive connector CN5-C.
- Value changes according to the control mode selection in A1-02.
- Enabled only when using the V/f with PG control mode.
- Depending on the drive series, a second PG (PG 2) may not be possible. Refer to the Yaskawa AC Drive Technical Manual for the drive in your application
- The parameter is available only for the drive connector CN5-B.

Troubleshooting
Preventing Noise Interference
Take the following steps to prevent erroneous operation caused by noise interference:
- Use shielded wire for the PG signal lines.
- Limit the length of all motor output power cables to less than 100 m.
- Separate the control wiring to the option, main circuit input power wiring, and motor output power cables.
- Ground the shield on the PG side and the drive side. If noise problems arise in the PG signal, verify that the shield is properly grounded and ground one end of the signal line or remove the ground connection on both ends.
Interface Circuit

Drive-Side Error Codes
Table 7 lists the various fault codes related to the option and pulse generator. Refer to the drive Technical Manual for further details on fault codes.
Check the following items first when an error code occurs on the drive:
- Make sure the PG cable is properly connected.
- Check the cables between the PG and the option.
- Make sure the option is properly installed to the drive.
Table 7 Fault Displays, Causes, and Possible Solutions
| Digital Operator Display | Fault Name | |
 | dEv | Speed Deviation (for Control Mode with PG) |
| The deviation between the speed reference and speed feedback is greater than the setting in F1-10 for longer than the time set to F1-11. | ||
| Cause | Possible Solution | |
| The load is too heavy. | Reduce the load. | |
| The acceleration and deceleration times are set too short. | Increase the acceleration and deceleration times (C1-01 through C1-08). | |
| The load is locked up. | Check the machine. | |
| Parameters are set inappropriately. | Check the settings of parameters F1-10 and F1-11. | |
| Motor brake is engaged. | Ensure the motor brake releases properly. | |
| Digital Operator Display | Fault Name | |
 | dv1 | Z Channel Pulse Fault Detection |
| The motor turned one full rotation while failing to detect the Z channel pulse. | ||
| Cause | Possible Solution | |
| The PG encoder is disconnected or is not wired properly, or the PG option or PG are damaged. |
| |
| Digital Operator Display | Fault Name | |
 | dv2 | Z Channel Pulse Noise Fault Detection |
| The Z channel pulse is out of phase by more than 5 degrees for the number of times specified in parameter F1-17. | ||
| Cause | Possible Solution | |
| PG cable noise interference. | Separate the PG cable wiring from the source of the noise (e.g., drive output wiring). | |
| The PG encoder is disconnected or is not wired properly, or the PG option or PG are damaged. |
| |
| Digital Operator Display | Fault Name | |
 | dv3 | Inversion Detection |
| ||
| Cause | Possible Solution | |
| The Z channel pulse offset is not set properly to E5-11. | Set the value for Δθ to E5-11 as specified on the motor nameplate. Replacing the PG encoder or changing the application so the motor rotates in reverse requires readjustment of the Z channel pulse offset. | |
| An external force on the load side caused the motor to move. |
| |
| Noise interference along the PG cable affecting the A channel or B channel. |
| |
| The PG encoder is disconnected or is not wired properly, or the PG option or PG are damaged. | ||
| The PG encoder rotational direction set to F1-05 is in the opposite direction of the motor wiring. | Make sure motor wiring for each phase (U, V, W) is connected properly. | |
| Digital Operator Display | Fault Name | |
 | dv4 | Inversion Prevention Detection |
| Pulses indicate that the motor is rotating in the opposite direction of the speed reference. Set the number of pulses to trigger inverse detection to F1-19. Note: To avoid nuisance faults, be sure to disable inverse detection in applications where the motor may rotate in the opposite direction of the speed reference. Set F1-19 to 0 to disable this feature. | ||
| Cause | Possible Solution | |
| The Z channel pulse offset is not set properly to E5-11. |
| |
| Noise interference along the PG is cable affecting the A or B pulse. |
| |
| PG encoder is disconnected or is not wired properly, or the PG option or PG are damaged. |
| |
| Digital Operator Display | Fault Name | |
 | oFA00 | Non-Compatible Option connected to drive port CN5-A |
| Cause | Possible Solution | |
| Non-compatible option connected to drive port CN5-A. | Use only compatible options. Connect PG-X3 to CN5-B or CN5-C. For other option cards, refer to the Installation Manual for that option card. | |
| Digital Operator Display | Fault Name | |
 | oFb00 | Non-Compatible Option connected to drive port CN5-B |
| Cause | Possible Solution | |
| Non-compatible option connected to drive port CN5-B. | Use only compatible options. Connect PG-X3 to CN5-B or CN5-C. For other option cards, refer to the Installation Manual for that option card. | |
| Digital Operator Display | Fault Name | |
 | oFb01 | Option Connection Error at drive port CN5-B |
| Cause | Possible Solution | |
| Option at drive port CN5-B was changed during run. | Switch the power off and reconnect the option. | |
| Digital Operator Display | Fault Name | |
 | oFC01 | Option Connection Error at drive port CN5-C |
| Cause | Possible Solution | |
| Option at drive port CN5-C was changed during run. | Switch the power off and reconnect the option. | |
| Digital Operator Display | Fault Name | |
 | oPE06 | Control Method Selection Error |
| Correct the setting for the control method. | ||
| Cause | Possible Solution | |
| Control mode requires installing a PG option, but no PG encoder is installed (A1-02 = 1, 3, or 7). |
| |
| Digital Operator Display | Fault Name | |
 | oS | Overspeed |
| The motor speed feedback exceeded the F1-08 setting. | ||
| Cause | Possible Solution | |
| Overshoot is occurring. |
| |
| Incorrect speed feedback scaling when terminal RP is used as speed feedback input in V/f control. |
| |
| Incorrect PG pulse number set. | Check and correct parameter F1-01. | |
| Inappropriate parameter settings. | Check the setting for the overspeed detection level and the overspeed detection time (F1-08 and F1-09). | |
| Digital Operator Display | Fault Name | |
 | PGo | PG Disconnected |
| Detected when no PG pulses received for a time longer than setting in F1-14. | ||
| Cause | Possible Solution | |
| PG cable is disconnected. | Reconnect the cable. | |
| PG cable wiring is wrong. | Correct the wiring. | |
| PG encoder does not have enough power. | Make sure the correct power supply is properly connected to the PG encoder. | |
| Brake is holding the PG. | Ensure the brake releases properly. | |
| Digital Operator Display | Fault Name | |
 | PGoH | PG Hardware Fault |
| PG cable is disconnected. | ||
| Cause | Possible Solution | |
| PG cable is disconnected. | Reconnect the cable. | |
Specifications
Table 8 Option Specifications
| Items | Specifications |
| Model | PG-X3 |
| Compatible Pulse Generators | Line driver Single-channel (A pulse), two-channel (A, B pulse) or three-channel (A, B, Z (R) pulse) |
| PG Wiring Length | 100 m (328 ft.) maximum |
| PG Power Supply | Output voltage: 12 V ± 5% or 5.5 V ± 5% Max. Output Current: 200 mA |
| Compatible Control Modes | V/f with PG, Closed Loop Vector, Closed Loop Vector for PM motors |
| Maximum Input Frequency | 300 kHz |
| Pulse Monitor Output | Monitor for A channel, B channel, and Z pulse output Matches RS-422 level |
| PG Disconnect Detection | Software and hardware detection |
| Ambient Temperature | -10°C to +50°C (14°F to 122°F) |
| Humidity | 95% RH or lower with no condensation |
| Storage Temperature | -20°C to +60°C (-4°F to 140°F) allowed for short-term transport of the product |
| Area of Use | Indoor (free of corrosive gas, airborne particles, etc.) |
| Altitude | 1000 m (3280 ft.) or lower |
Preface and Safety
Yaskawa manufactures products used as components in a wide variety of industrial systems and equipment. The selection and application of Yaskawa products remain the responsibility of the equipment manufacturer or end user. Yaskawa accepts no responsibility for the way its products are incorporated into the final system design. Under no circumstances should any Yaskawa product be incorporated into any product or design as the exclusive or sole safety control. Without exception, all controls should be designed to detect faults dynamically and fail safely under all circumstances. All systems or equipment designed to incorporate a product manufactured by Yaskawa must be supplied to the end user with appropriate warnings and instructions as to the safe use and operation of that part. Any warnings provided by Yaskawa must be promptly provided to the end user. Yaskawa offers an express warranty only as to the quality of its products in conforming to standards and specifications published in the Yaskawa manual. NO OTHER WARRANTY, EXPRESS OR IMPLIED, IS OFFERED. Yaskawa assumes no liability for any personal injury, property damage, losses, or claims arising from misapplication of its products.
Terms
Note: Indicates supplemental information that is not related to safety messages
Drive: Yaskawa AC Drive 1000-Series
Option: Yaskawa AC Drive 1000-Series Option Motor PG Feedback Line Driver Interface: Type PG-X3
PG: Pulse Generator or Encoder Mounted on the Motor
Supplemental Safety Information
Read and understand this manual before installing, operating, or servicing this option. Install the option according to this manual and local codes.
The following conventions indicate safety messages in this manual. Failure to heed these messages could cause fatal injury or damage products and related equipment and systems.

Indicates a hazardous situation, which, if not avoided, will result in death or serious injury.
Indicates a hazardous situation, which, if not avoided, could result in death or serious injury.

Indicates a hazardous situation, which, if not avoided, could result in minor or moderate injury.
NOTICE
Indicates an equipment damage message.
General Safety
General Precautions
- The diagrams in this book may include options and drives without covers or safety shields to illustrate details. Be sure to reinstall covers or shields before operating any devices. Use the option according to the instructions described in this manual.
- Any illustrations, photographs, or examples used in this manual are provided as examples only and may not apply to all products to which this manual is applicable.
- The products and specifications described in this manual or the content and presentation of the manual may be changed without notice to improve the product and/or the manual.
- When ordering new copies of the manual, contact a Yaskawa representative or the nearest Yaskawa sales office and provide the manual number shown on the front cover.
Heed the safety messages in this manual.
Failure to comply will result in death or serious injury.
The operating company is responsible for any injuries or equipment damage resulting from failure to heed the warnings in this manual.
NOTICE
Do not modify the drive or option circuitry.
Failure to comply could result in damage to the drive or option and will void warranty.
Yaskawa is not responsible for any modification of the product made by the user. This product must not be modified.
Do not expose the drive or option to halogen group disinfectants.
Failure to comply may cause damage to the electrical components in the option.
Do not pack the drive in wooden materials that have been fumigated or sterilized.
Do not sterilize the entire package after the product is packed.
DRIVE CENTER (INVERTER PLANT)
2-13-1, Nishimiyaichi, Yukuhashi, Fukuoka, 824-8511, Japan
Phone: 81-930-25-3844
Fax: 81-930-25-4369
http://www.yaskawa.co.jp
YASKAWA ELECTRIC CORPORATION
New Pier Takeshiba South Tower, 1-16-1, Kaigan, Minatoku, Tokyo, 105-6891, Japan
Phone: 81-3-5402-4502
Fax: 81-3-5402-4580
http://www.yaskawa.co.jp
YASKAWA AMERICA, INC.
2121 Norman Drive South, Waukegan, IL 60085, U.S.A.
Phone: 1-800-YASKAWA (927-5292) or 1-847-887-7000
Fax: 1-847-887-7310
http://www.yaskawa.com
YASKAWA ELÉTRICO DO BRASIL LTDA.
Avenida Piraporinha 777, Diadema, São Paulo, 09950-000, Brasil
Phone: 55-11-3585-1100
Fax: 55-11-3585-1187
http://www.yaskawa.com.br
YASKAWA EUROPE GmbH
Hauptstrasse 185, 65760 Eschborn, Germany
Phone: 49-6196-569-300
Fax: 49-6196-569-398
http://www.yaskawa.eu.com
YASKAWA ELECTRIC KOREA CORPORATION
9F, Kyobo Securities Bldg., 26-4, Yeouido-dong, Yeongdeungpo-gu, Seoul, 150-737, Korea
Phone: 82-2-784-7844
Fax: 82-2-784-8495
http://www.yaskawa.co.kr
YASKAWA ELECTRIC (SINGAPORE) PTE. LTD.
151 Lorong Chuan, #04-02A, New Tech Park, 556741, Singapore
Phone: 65-6282-3003
Fax: 65-6289-3003
http://www.yaskawa.com.sg
YASKAWA ELECTRIC (CHINA) CO., LTD.
12F, Carlton Bld., No.21 HuangHe Road, HuangPu District, Shanghai 200003, China
Phone: 86-21-5385-2200
Fax: 86-21-5385-3299
http://www.yaskawa.com.cn
YASKAWA ELECTRIC (CHINA) CO., LTD. BEIJING OFFICE
Room 1011, Tower W3 Oriental Plaza, No. 1 East Chang An Ave.,
Dong Cheng District, Beijing, 100738, China
Phone: 86-10-8518-4086
Fax: 86-10-8518-4082
YASKAWA ELECTRIC TAIWAN CORPORATION
9F, 16, Nanking E. Rd., Sec. 3, Taipei, 104, Taiwan
Phone: 886-2-2502-5003
Fax: 886-2-2505-1280
YASKAWA INDIA PRIVATE LIMITED
#17/A Electronics City, Hosur Road Bangalore 560 100 (Karnataka), India
Phone: 91-80-4244-1900
Fax: 91-80-4244-1901
http://www.yaskawaindia.in
Documents / Resources
References
安川電機
![www.yaskawa.com]() Yaskawa America Inc. Home - Yaskawa
Yaskawa America Inc. Home - Yaskawa![www.yaskawa.com.br]() Yaskawa - Inversores de frequência e servo acionamentos.
Yaskawa - Inversores de frequência e servo acionamentos.Yaskawa Europe - Your First Choice for Automation
![www.yaskawa.co.kr]() 한국야스카와전기(주)
한국야스카와전기(주)YASKAWA Asean
![www.yaskawa.com.cn]() http://www.yaskawa.com.cn
http://www.yaskawa.com.cn![www.yaskawaindia.in]() Manufacturers of AC Drives, Motion Control Systems & Industrial Robots – Yaskawa
Manufacturers of AC Drives, Motion Control Systems & Industrial Robots – Yaskawa

Download manual
Here you can download full pdf version of manual, it may contain additional safety instructions, warranty information, FCC rules, etc.
Advertisement



















Need help?
Do you have a question about the A1000 Series and is the answer not in the manual?
Questions and answers