
Related Manuals for Beckhoff KM4602
















Summary of Contents for Beckhoff KM4602
- Page 1 Documentation KM4602 Two Channel Analog Output Module with Manual and Automatic Operation Version: 2.2.0 Date: 2019-05-02...
-
Page 3: Table Of Contents
Register overview .......................... 19 Register description ......................... 20 Examples of Register Communication .................... 23 4.6.1 Example 1: reading the firmware version from Register 9.......... 23 4.6.2 Example 2: Writing to an user register................ 23 5 Appendix .............................. 27 Support and Service ........................ 27 KM4602 Version: 2.2.0... - Page 4 Table of contents Version: 2.2.0 KM4602...
-
Page 5: Foreword
The TwinCAT Technology is covered, including but not limited to the following patent applications and patents: EP0851348, US6167425 with corresponding applications or registrations in various other countries. ® EtherCAT is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany. Copyright © Beckhoff Automation GmbH & Co. KG, Germany. -
Page 6: Safety Instructions
All the components are supplied in particular hardware and software configurations appropriate for the application. Modifications to hardware or software configurations other than those described in the documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG. Personnel qualification This description is only intended for trained specialists in control, automation and drive engineering who are familiar with the applicable national standards. -
Page 7: Documentation Issue Status
FF - firmware version HH - hardware version Sample with ser. no.: 35 05 00 01: 35 - week of production 35 05 - year of production 2005 00 - firmware version 00 01 - hardware version 01 KM4602 Version: 2.2.0... -
Page 8: Product Overview
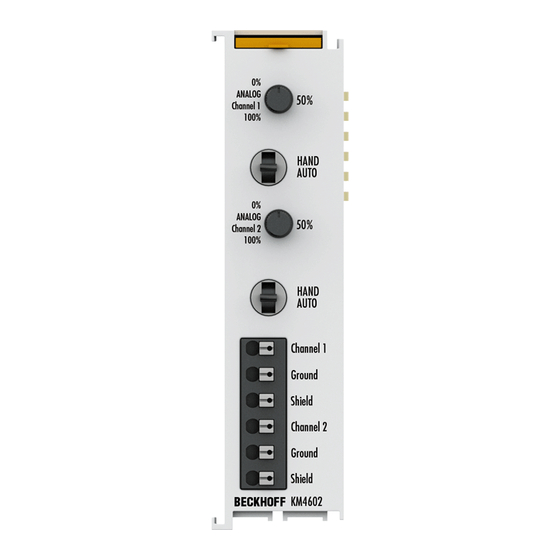
Product overview Introduction Fig. 1: KM4602 The KM4602 analog output terminal has two potential-free analog outputs (0 to 10 V ). Both outputs are internally connected to a common ground. For each channel a switch enables selection between automatic and manual mode: •... -
Page 9: Technical Data
Current consumption from K-bus typically 175 mA Width of a bus terminal block Maximum 64 standard Bus Terminals or 80 cm (one KM4602-0000 corresponds to 2 standard Bus Terminals here) Data width in the input process image 8 bit status, 16 bit data... -
Page 10: Mounting And Wiring
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or wiring of the Bus Terminals! Mounting • Fit the mounting rail to the planned assembly location. and press (1) the terminal module against the mounting rail until it latches in place on the mounting rail (2). Version: 2.2.0 KM4602... - Page 11 (3a) from the top hat rail back into the terminal module. • Pull (4) the terminal module away from the mounting surface. Avoid canting of the module; you should stabilize the module with the other hand, if required. KM4602 Version: 2.2.0...
-
Page 12: Dimensions
Mounting and wiring Dimensions Fig. 2: KM4602 dimensions Version: 2.2.0 KM4602... -
Page 13: Connection
Mounting and wiring Connection Fig. 3: KM4602 connection Terminal point Description Channel 1 Signal connection for channel 1 Ground Earth connection for channel 1 Shield Shield connection for channel 1 Channel 2 Signal connection for channel 2 Ground Earth connection for channel 3 Shield Shield connection for channel 2 KM4602 Version: 2.2.0... -
Page 14: Fig. 4 Internal Km4602 Configuration
Mounting and wiring Internal KM4602 configuration Fig. 4: Internal KM4602 configuration Version: 2.2.0 KM4602... -
Page 15: Access From The User Program
Access from the user program Access from the user program Process image The KM4602 terminal module represents itself in the process image with a maximum of 6 bytes of input data and 6 bytes of output data. These are organized as follows: Format... - Page 16 High byte Low byte High byte Low byte Complete evaluation: yes reserved reserved Motorola format: no Ch1 D1 Ch1 D0 Ch1 D1 Ch1 D0 Word alignment: yes reserved reserved Ch2 D1 Ch2 D0 Ch2 D1 Ch2 D0 Version: 2.2.0 KM4602...
-
Page 17: Control And Status Byte
Status byte 1 (for process data mode) Status byte 1 (SB1) is located in the input image and is transmitted from terminal module to the controller. SB1.7 SB1.6 SB1.5 SB1.4 SB1.3 SB1.2 SB1.1 SB1.0 Name RegAccess - OperationMode KM4602 Version: 2.2.0... - Page 18 Reg. no. Number of the register that was read or written. Channel 2 The control and status bytes of channel 2 (CB2 and SB2) have the same structure as the control and status bytes of channel 1 [} 17]. Version: 2.2.0 KM4602...
-
Page 19: Register Overview
Access from the user program Register overview The following registers are used for parameterization of the KM4602. Each signal channel of the analog terminal has one register that can be read or written to with the aid of control [} 18], status [} 18] and data bytes [} 15] via register communication. -
Page 20: Register Description
Access from the user program Register description The following registers are used for parameterization of the KM4602. Each signal channel of the analog terminal has one register that can be read or written to with the aid of control [} 18], status [} 18] and data bytes [} 15] via register communication. - Page 21 R21: Manufacturer's switch-on value The terminal applies the manufacturer switch-on value to its output after a system reset or a watchdog timer overflow (terminal has received no process data for 100 ms). Register value (16 bit signed integer). KM4602 Version: 2.2.0...
- Page 22 User scaling can be activated in the feature register via bit R32.0 [} 22]. R34: User scaling - gain (A This register contains the gain of the user scaling. Default: 0x0100 (256 User scaling can be activated in the feature register via bit R32.0 [} 22]. Version: 2.2.0 KM4602...
-
Page 23: Examples Of Register Communication
(power-off/power-on). I. Write the code word (0x1235) into Register 31. Output Data Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte 0xDF (1101 1111 0x12 0x35 Explanation: KM4602 Version: 2.2.0... - Page 24 • Bit 0.6 set means: writing to the register. • Bits 0.5 to 0.0 indicate register number 32 with 10 0000 • The output data word (byte 1 and byte 2) contains the new value for the feature register. Version: 2.2.0 KM4602...
- Page 25 • Bit 0.6 set means: writing to the register. • Bits 0.5 to 0.0 specify the register number 31 with 01 1111 • The output data word (byte 1 and byte 2) contains 0x0000 for reactivating write protection. KM4602 Version: 2.2.0...
- Page 26 • The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of the control byte. • The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still displayed are invalid! Version: 2.2.0 KM4602...
-
Page 27: Appendix
Beckhoff's branch offices and representatives Please contact your Beckhoff branch office or representative for local support and service on Beckhoff products! The addresses of Beckhoff's branch offices and representatives round the world can be found on her internet pages: http://www.beckhoff.com You will also find further documentation for Beckhoff components there. - Page 28 List of illustrations List of illustrations Fig. 1 KM4602 ............................Fig. 2 KM4602 dimensions ........................Fig. 3 KM4602 connection ........................Fig. 4 Internal KM4602 configuration..................... Version: 2.2.0 KM4602...
Need help?
Do you have a question about the KM4602 and is the answer not in the manual?
Questions and answers