
Subscribe to Our Youtube Channel
Related Manuals for Beckhoff EP1908


Summary of Contents for Beckhoff EP1908
- Page 1 AS2000 Operating Instruction for | EN EP1908 Blindtext Blindtext Blindtext TwinSAFE EtherCAT Box with 8 fail-safe inputs 2023-03-07 | Version: 3.0.0...
-
Page 3: Table Of Contents
5.2.4 Mounting .......................... 21 5.2.5 Connection ........................ 22 5.2.6 Signal cables........................ 28 5.2.7 Description of the EP1908 test pulses ................ 29 5.2.8 TwinSAFE reaction times.................... 31 Operation modes.......................... 32 EP1908 process image ........................ 33 Diagnostics............................ 34 5.5.1 Run LED diagnostics...................... 34 5.5.2... - Page 4 Table of contents EP1908 configuration in TwinCAT .................... 36 5.6.1 Adding an EtherCAT device..................... 36 5.6.2 Adding a EP1908 ...................... 36 5.6.3 Entering a TwinSAFE address and parameters in the System Manager...... 38 6 Service life ............................... 46 7 Maintenance and cleaning ........................ 47 8 Decommissioning ...........................
-
Page 5: Notes On The Documentation
Notes on the documentation Disclaimer Beckhoff products are subject to continuous further development. We reserve the right to revise the operating instructions at any time and without prior announcement. No claims for the modification of products that have already been supplied may be made on the basis of the data, diagrams and descriptions in these operating instructions. -
Page 6: Limitation Of Liability
Modifications and changes to the hardware and/or software configuration that go beyond the documented options are prohibited and nullify the liability of Beckhoff Automation GmbH & Co. KG. The following is excluded from the liability: •... -
Page 7: Documentation Issue Status
The original documentation is written in German. All other languages are derived from the German original. Product features Only the product properties specified in the current operating instructions are valid. Further information given on the product pages of the Beckhoff homepage, in emails or in other publications is not authoritative. EP1908 Version: 3.0.0... -
Page 8: Staff Qualification
• Independently identify, avoid and eliminate sources of hazard. • Apply relevant standards and directives. • Implement specifications from accident prevention regulations. • Evaluate, prepare and set up the workplaces. • Evaluate, optimize and execute work independently. Version: 3.0.0 EP1908... -
Page 9: Safety And Instruction
Notes are used for important information on the product. The possible consequences of failure to observe these include: • Malfunctions of the product • Damage to the product • Damage to the environment Information This sign indicates information, tips and notes for dealing with the product or the software. EP1908 Version: 3.0.0... -
Page 10: Beckhoff Support And Service
The employees support you in the programming and commissioning of sophisticated automation systems. Hotline: +49 5246/963-157 E-mail: support@beckhoff.com Web: www.beckhoff.com/support Training Training in Germany takes place in our training center at the Beckhoff headquarters in Verl, at subsidiaries or, by arrangement, at the customer's premises. Hotline: +49 5246/963-5000 E-mail: training@beckhoff.com Web: www.beckhoff.com/training... -
Page 11: For Your Safety
Products marked with a crossed-out waste bin must not be disposed of with domestic waste. The device is considered waste electrical and electronic equipment when it is disposed of. Observe the national regulations for the disposal of waste electrical and electronic equipment. EP1908 Version: 3.0.0... -
Page 12: Safety Image Signs
For your safety Safety image signs On Beckhoff products you will find attached or lasered safety pictograms, which vary depending on the product. They serve to serve to ensure safety for people and to prevent damage to the products. Safety pictograms must not be removed and must be legible for the user. -
Page 13: General Safety Instructions
De-energize and switch off components before working on them Check all safety-relevant equipment for functionality before working on the TwinSAFE component. Secure the working environment. Secure the machine or plant against being inadvertently started up. Observe the chapter Decommissioning [} 48]. EP1908 Version: 3.0.0... -
Page 14: System Description
M8 or M12 connectors. Basic EtherCAT documentation You will find a detailed description of the EtherCAT system in the Basic System Documentation for EtherCAT, which is available for download from our website (www.beckhoff.com) under Downloads. Version: 3.0.0 EP1908... -
Page 15: Product Description
In this case all inputs are set to safe state (logical 0). This message can be reset through a rising edge of the safe output signal ErrAck of the EP1908-0002. With a two-channel connection, the EP1908-0002 meets the requirements of EN 61508-1:2010 SIL 3 and DIN EN ISO 13849-1:2006 (Cat 4, PL e). -
Page 16: Intended Use
TwinSAFE components shall only be used for the purposes described below! The TwinSAFE EtherCAT Box expands the application range of the Beckhoff system with functions that enable it to be used for machine safety applications. The TwinSAFE Boxes are designed for machine safety functions and directly associated industrial automation tasks. -
Page 17: Technical Data
Output current of the clock outputs typically 10 mA, max. 15 mA Input process image 6 bytes Output process image 6 bytes Supply voltage for the EP1908 24 V (–15%/+20%) Current consumption U 8 channels occupied: typically 87 mA (connected with eight potential-free contacts) 0 channel occupied: typically 80 mA Current consumption U 8 channels occupied: approx. -
Page 18: Safety Parameters
1. Special proof tests throughout the service life of the EtherCAT Box are not required. 2. Classification according to EN 61508-2:2010 (see chapters 7.4.4.1.2 and 7.4.4.1.3) The EP1908-0002 EtherCAT Box can be used for safety-related applications according to IEC 61508 up to SIL3 and EN ISO 13849-1 up to PL e (Cat4). -
Page 19: Dimensions
Product description Dimensions Fig. 4: Dimensions The modules have the following dimensions. Width: 30 mm Height: 126 mm Depth: 26.5 mm When fully wired, the connected cables increase the total depth of the module. EP1908 Version: 3.0.0... -
Page 20: Operation
Use the original packaging in which the components were delivered for transporting and storing the TwinSAFE components. CAUTION Note the specified environmental conditions Please ensure that the digital TwinSAFE components are only transported and stored under the specified environmental conditions (see technical data). Version: 3.0.0 EP1908... -
Page 21: Address Settings On The Twinsafe Ethercat Box
Fig. 5: Rotary switch for setting the TwinSAFE address The TwinSAFE address of the box must be set using the three rotary switches at the bottom of the EP1908-0002 TwinSAFE EP Box. TwinSAFE addresses between 1 and 4095 are available. Rotary switch... -
Page 22: Connection
5.2.5 Connection 5.2.5.1 Tightening torque for connectors The plug connectors should be tightened with the recommended torque. Fig. 7: EtherCAT Box with M8 and M12 connectors Type Connection ft-lb Power supply, EtherCAT Input signals 0,44 Version: 3.0.0 EP1908... -
Page 23: Fig. 8 Torque Wrench Zb8801
Torque wrench Fig. 8: Torque wrench ZB8801 Ensure the proper torque is used Use torque wrenches available from Beckhoff to tighten the plug connectors (see accessories)! 5.2.5.2 EtherCAT connection The EtherCAT Box (EPxxxx) has two M8 connectors marked green for the incoming and outgoing EtherCAT connection. -
Page 24: Fig. 10 Ethercat Leds
EtherCAT/Ethernet infrastructure", which is available for download from www.Beckhoff.de. EtherCAT uses four cable wires for signal transmission. Due to automatic cable detection (auto-crossing) symmetric (1:1) or cross-over cables can be used between EtherCAT devices from BECKHOFF. 5.2.5.5 Power Connection Two M8 connectors at the low-end of the modules are used for feeding and routing the supply voltages: •... -
Page 25: Fig. 11 Connections For The Supply Voltages
Redirection of the supply voltages The power IN and OUT connections are bridged in the module. Hence, the supply voltages Us and Up can be passed from EtherCAT Box to EtherCAT Box in a simple manner. EP1908 Version: 3.0.0... -
Page 26: Fig. 13 Status-Leds For The Power Supply
The power supply voltage, U , is present 5.2.5.7 Overvoltage protection If protection against overvoltage is necessary in your system, provide a protective circuit (surge filter) against overvoltage for the power supply to the EtherCAT Box. Version: 3.0.0 EP1908... -
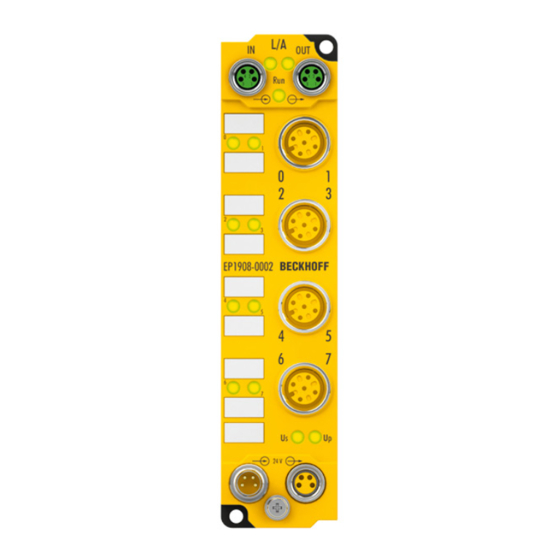
Page 27: Fig. 14 Signal Connection
Pulse output 8 Input 8 not connected Configurable inputs The inputs 1 to 8 can be occupied as you want with normally closed contacts or normally open contacts. The corresponding analysis is carried out in the safety PLC. EP1908 Version: 3.0.0... -
Page 28: Signal Cables
30 m if a sensor test is active. The use of contact points, plug connectors or additional switching contacts in the cabling also reduces the maximum propagation. Cable routing Fig. 16: Cable routing Version: 3.0.0 EP1908... -
Page 29: Description Of The Ep1908 Test Pulses
However, this then leads to a reduction in the degree of diagnostic cover when calculating the performance level. 5.2.7 Description of the EP1908 test pulses The typical length of a test pulse (switching from 24 V to 0 V and back to 24 V) is 350 µs and takes place approx. 180 times per second. -
Page 30: Fig. 17 Ep1908 Test Pulses
Operation Fig. 17: EP1908 test pulses If self-testing sensors are to be used on the safe inputs, please refer to chapter 4.5.3.1 [} 40]. Version: 3.0.0 EP1908... -
Page 31: Twinsafe Reaction Times
Reaction time of the sensor until the signal is provided at the interface. Typically supplied by the sensor manufacturer. RTInput Reaction time of the safe input, such as EL1904 or EP1908. This time can be found in the technical data. In the case of the EL1904 it is 4 ms. RTComm Reaction time of the communication This is typically 3x the EtherCAT cycle time, because new data can only be sent in a new Safety-over-EtherCAT telegram. -
Page 32: Operation Modes
The minimum supported frequency is 2 Hz. Values below this are shown as 0. The maximum supported frequency is 500 Hz. Values above this result in a diagnostic messages of the EP1908-0002. This message can be reset through a rising edge of the safe output signal ErrAck of the EP1908-0002. Single logic channel x /... -
Page 33: Ep1908 Process Image
ErrAck of the EP1908-0002. EP1908 process image The process image of the EP1908-0002 consists of 6 bytes of input data and 6 bytes of output data. These data contain the Safety over EtherCAT protocol. The eight safe input channels of the EP1908-0002 are contained in the safe input data. -
Page 34: Diagnostics
The Run LED shows diagnostic information for the EP1908-0002. Fig. 21: Run LED diagnostics Run LED (green) The Run LED lights green when the EP1908-0002 has booted without error. Run LED (red) The Run LED lights red when the TwinSAFE EtherCAT Box has detected an error, such as cross-circuit, external feed or exceeding of the maximum frequency. -
Page 35: Diagnostic Objects
FSOE max The following sub-indices contain the maximum frequencies (in 0.1 Hz) Velocity determined since the last startup of the TwinSAFE communication with the EP1908-0002. 0xA009:01 … maxVelocity 1 … Maximum frequency at channels 1 to 8 in 0.1 Hz 0xA009:08... -
Page 36: Ep1908 Configuration In Twincat
Adding an EtherCAT device See TwinCAT automation software documentation. 5.6.2 Adding a EP1908 An EP1908-0002 is added in exactly the same way as any other Beckhoff EtherCAT Box. In the list open the item Safety Terminals and select the EP1908-0002. Version: 3.0.0 EP1908... -
Page 37: Fig. 22 Twincat - Adding A Ep1908
Operation Fig. 22: TwinCAT - Adding a EP1908 EP1908 Version: 3.0.0... -
Page 38: Entering A Twinsafe Address And Parameters In The System Manager
The TwinSAFE address set at the rotary switch must be entered under the tab Safe Parameters (FSoE Address entry) below the EP1908-0002. All other parameters can also be set there. They can also be found under the respective TwinSAFE connection on the tab Safe Parameters. -
Page 39: Fig. 24 Connection Tab
Fig. 24: Connection tab Overview of the TwinSAFE parameters Parameter name Meaning Values FSoE_Address Address of the rotary switch or the setting in the EP1908 1 to 4095 Operating Mode Digital Digital Sensor test channel 1 active The clock signal of channel 1 (pin 1) is checked at the channel 1 input TRUE / FALSE... -
Page 40: Fig. 25 Maximum Permissible Sensor Self-Test Duration
Fig. 25: Maximum permissible sensor self-test duration Parameter To connect these sensors please set the following parameters for the EP1908-0002 in the TwinCAT System Manager: • Connect the two sensor signals either to channels 1 & 2, 3 & 4 and 5 & 6 or channels 7 & 8 and activate asynchronous repetition OSSD or any pulse repetition for the two inputs used under parameter Logic for channel x and y. - Page 41 The minimum supported frequency is 2 Hz. Values below this are shown as 0. The maximum supported frequency is 500 Hz. Values above this result in a diagnostic messages of the EP1908-0002. This message can be reset through a rising edge of the safe output signal ErrAck of the EP1908-0002.
- Page 42 The set mode Two Channel SyncVelocity Control Channel x/y determines a frequency from the signals of an input pair of the EP1908-0002, whereby one input signal always has to be set to logical 1. The frequencies of the two input signals must be the same.
-
Page 43: Fig. 26 Example Of The Signal Curve Of The Input Signal In The Operating Mode Two Channel Sync Ve- Locity Control
The set mode Two Channel Encoder Velocity Control Channel x/y is used to determine a frequency from the signals of an input pair of the EP1908-0002. The upper limit frequencies are specified separately, but should but the same. The same frequencies have to be supplied, whereby all states are permitted that may occur at the encoder interface. -
Page 44: Fig. 27 Example Of The Signal Curve Of The Input Signal In The Operating Mode Two Channel Encoder Velocity Control
The set mode Two Channel AsyncVelocity Control Channel x/y is used to determine a frequency from the signals of an input pair of the EP1908-0002. In this mode is only the compliance with the limits for the two channels is monitored. The upper limit frequencies are specified separately. -
Page 45: Fig. 28 Example Of The Signal Curve Of The Input Signal In The Operating Mode Two Channel Async Ve- Locity Control
Operation Fig. 28: Example of the signal curve of the input signal in the operating mode Two Channel Async Velocity Control EP1908 Version: 3.0.0... -
Page 46: Service Life
SW: Software version Software version: 01 HW: Hardware version Hardware version: 00 Serial number (S.No.) In addition, the TwinSAFE EtherCAT Boxes have a unique serial number (S.No.). Fig. 29: Unique serial number (S.No.) of a TwinSAFE EtherCAT Box Version: 3.0.0 EP1908... -
Page 47: Maintenance And Cleaning
Maintenance and cleaning Cleaning by the manufacturer only Do not operate the TwinSAFE component if it is impermissibly dirty according to protection class IP20. Send impermissibly dirty TwinSAFE components to the manufacturer for cleaning. TwinSAFE components are basically maintenance-free. EP1908 Version: 3.0.0... -
Page 48: Decommissioning
In accordance with the WEEE-2012/19/EU directives, you can return used devices and accessories for professional disposal. The transport costs are borne by the sender. Send the used devices with the note "For disposal" to: Beckhoff Automation GmbH & Co. KG Gebäude „Service“ Stahlstraße 31... -
Page 49: Appendix
Protection against the effects of temporary immersion. The quantity of water being able to penetrate if the housing is submerged in water for 30 minutes at a depth of 1 m must not have any adverse effects. *) These protection classes only define protection against water, not against other liquids. EP1908 Version: 3.0.0... -
Page 50: Volatility
If there is customer specific data saved on the product, it cannot be ensured that this data might not be restored through for example forensic measures, even after the data is deleted through the provided tool chain. If this data is confidential, the scrapping of the product after usage is recommended to protect this data. Version: 3.0.0 EP1908... -
Page 51: Focus Of Certificates
The current certificates of all TwinSAFE components with the underlying standards and directives can be found at https://www.beckhoff.com/en-en/support/download-finder/certificates-approvals/. If the document refers only to the first four figures of a product (ELxxxx), the certificate is valid for all available variants of the component (ELxxxx-abcd). -
Page 52: Certificate
Appendix Certificate Fig. 30: EP1908 EC Declaration of Conformity Version: 3.0.0 EP1908... - Page 53 Worst-case reaction time ......................Fig. 20 EP1908 process image ........................ Fig. 21 Run LED diagnostics........................Fig. 22 TwinCAT - Adding a EP1908 ....................... Fig. 23 Safe Parameter tab ........................Fig. 24 Connection tab ..........................Fig. 25 Maximum permissible sensor self-test duration ................
- Page 55 More Information: www.beckhoff.com/EP1908 Beckhoff Automation GmbH & Co. KG Hülshorstweg 20 33415 Verl Germany Phone: +49 5246 9630 info@beckhoff.com www.beckhoff.com...
Need help?
Do you have a question about the EP1908 and is the answer not in the manual?
Questions and answers