Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Subscribe to Our Youtube Channel
Related Manuals for Trinamic TMCM-1181
















Summary of Contents for Trinamic TMCM-1181
- Page 1 MODULE FOR STEPPER MOTORS MODULE Firmware Version V1.26 TMCL™ FIRMWARE MANUAL TMCM-1181 1-axis Stepper Controller / Driver up to 6.3 RMS / 24V DC USB, RS485 [or RS232] NIQUE EATURES TRINAMIC Motion Control GmbH & Co. KG Hamburg, Germany www.trinamic.com...
-
Page 2: Table Of Contents
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Table of Contents Features ................................... 4 Putting the Module into Operation ........................6 Basic Set-Up ................................6 2.1.1 Connecting the module ..........................6 2.1.2 Start the TMCL-IDE Software Development Environment ..............7 Using TMCL Direct Mode ............................ -
Page 3: Tmcm-1181 Tmcl Firmware V1.26 Manual (Rev. 0.90 / 2013-Apr-15)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Bank 0 ................................... 65 Bank 1 ................................... 67 Bank 2 ................................... 67 Bank 3 ................................... 68 Hints and Tips ................................69 Reference Search ............................... 69 Changing the Prescaler Value of an Encoder .................... 72 Using the RS485 Interface .......................... -
Page 4: Features
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 1 Features The TMCM-1181 is a single axis controller/driver module for 2-phase bipolar stepper motors. It is highly integrated and can be used in many decentralized applications. The module can be mounted on the back of NEMA34 (86mm flange size) stepper motors and has been designed for coil currents up to 6.3A RMS... - Page 5 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) TRINAMIC – E TMCL NIQUE EATURES ASY TO SE WITH stallGuard2™ stallGuard2 is a high-precision sensorless load measurement using the back EMF on the coils. It can be used for stall detection as well as other uses at loads below those which stall the motor.
-
Page 6: Putting The Module Into Operation
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 2 Putting the Module into Operation Here you can find basic information for putting your TMCM-1181 into operation. If you are already common with TRINAMICs modules you may skip this chapter. -
Page 7: Start The Tmcl-Ide Software Development Environment
Choose COM port and type with the parameters shown in Figure 2.2 (baud rate 9600). Click OK. USB interface If the file TMCM-1181.inf is installed correctly, the module will be identified automatically. Figure 2.2 Setup dialogue and connection tab of the TMCL-IDE. -
Page 8: Using Tmcl Direct Mode
Start TMCL Direct Mode. Direct Mode If the communication is established the TMCM-1181 is automatically detected. If the module is not detected, please check all points above (cables, interface, power supply, COM port, baud rate). Issue a command by choosing Instruction, Type (if necessary), Motor, and Value and click Execute to send it to the module. -
Page 9: Important Motor Settings
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 2.2.1 Important Motor Settings There are some axis parameters which have to be adjusted right in the beginning after installing your module. Please set the upper limiting values for the speed (axis parameter 4), the acceleration (axis parameter 5), and the current (axis parameter 6). -
Page 10: Testing With A Simple Tmcl Program
Download Click the Assemble icon to convert the TMCL into machine code. Then download the program to the TMCM-1181 module by clicking the Download icon. Press icon Run. The desired program will be executed. Click the Stop button to stop the program. -
Page 11: Tmcl And The Tmcl-Ide: Introduction
3 TMCL and the TMCL-IDE: Introduction As with most TRINAMIC modules the software running on the microprocessor of the TMCM-1181 consists of two parts, a boot loader and the firmware itself. Whereas the boot loader is installed during production and testing at TRINAMIC and remains untouched throughout the whole lifetime, the firmware can be updated by the user. -
Page 12: Checksum Calculation
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.1.1 Checksum Calculation As mentioned above, the checksum is calculated by adding up all bytes (including the module address byte) using 8-bit addition. Here are two examples to show how to do this: in C: unsigned char i, Checksum;... -
Page 13: Status Codes
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.2.1 Status Codes The reply contains a status code. The status code can have one of the following values: Code Meaning Successfully executed, no error Command loaded into TMCL program EEPROM... -
Page 14: Tmcl Command Overview
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.4 TMCL Command Overview In this section a short overview of the TMCL commands is given. 3.4.1 TMCL Commands Command Number Parameter Description <motor number>, <velocity> Rotate right with specified velocity <motor number>, <velocity>... -
Page 15: Commands Listed According To Subject Area
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.4.2 Commands Listed According to Subject Area 3.4.2.1 Motion Commands These commands control the motion of the motor. They are the most important commands and can be used in direct mode or in standalone mode. - Page 16 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.4.2.5 Calculation Commands These commands are intended to be used for calculations within TMCL™ applications. Although they could also be used in direct mode it does not make much sense to do so.
- Page 17 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.4.2.6.3 Interrupt Vectors The following table shows all interrupt vectors that can be used. Interrupt number Interrupt type Timer 0 Timer 1 Timer 2 Target position reached stallGuard2 Deviation Left stop switch...
- Page 18 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) In the example above, the interrupt numbers are used directly. To make the program better readable use the provided include file Interrupts.inc. This file defines symbolic constants for all interrupt numbers which can be used in all interrupt commands.
-
Page 19: Commands
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5 Commands The module specific commands are explained in more detail on the following pages. They are listed according to their command number. 3.5.1 ROR (rotate right) With this command the motor will be instructed to rotate with a specified velocity in right direction (increasing the position counter). -
Page 20: Rol (Rotate Left)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.2 ROL (rotate left) With this command the motor will be instructed to rotate with a specified velocity (opposite direction compared to ROR, decreasing the position counter). Internal function: First, velocity mode is selected. Then, the velocity value is transferred to axis parameter #0 (target velocity). -
Page 21: Mst (Motor Stop)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.3 MST (motor stop) With this command the motor will be instructed to stop with a soft stop. Internal function: The axis parameter target velocity is set to zero. Related commands: ROL, ROR, SAP, GAP... -
Page 22: Mvp (Move To Position)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.4 MVP (move to position) With this command the motor will be instructed to move to a specified relative or absolute position. It will use the acceleration/deceleration ramp and the positioning speed programmed into the unit. This command is non-blocking –... -
Page 23: Sap (Set Axis Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.5 SAP (set axis parameter) With this command most of the motion control parameters of the module can be specified. The settings will be stored in SRAM and therefore are volatile. That is, information will be lost after power off. Please use command STAP (store axis parameter) in order to store any setting permanently. -
Page 24: Gap (Get Axis Parameter)
3.5.6 GAP (get axis parameter) Most parameters of the TMCM-1181 can be adjusted individually for the axis. With this parameter they can be read out. In standalone mode the requested value is also transferred to the accumulator register for further processing purposes (such as conditioned jumps). In direct mode the value read is only output in the value field of the reply (without affecting the accumulator). -
Page 25: Stap (Store Axis Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.7 STAP (store axis parameter) An axis parameter previously set with a Set Axis Parameter command (SAP) will be stored permanent. Most parameters are automatically restored after power up (refer to axis parameter list in chapter 4). -
Page 26: Rsap (Restore Axis Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.8 RSAP (restore axis parameter) For all configuration-related axis parameters non-volatile memory locations are provided. By default, most parameters are automatically restored after power up (refer to axis parameter list in chapter 4). A single parameter that has been changed before can be reset by this instruction also. -
Page 27: Sgp (Set Global Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.9 SGP (set global parameter) With this command most of the module specific parameters not directly related to motion control can be specified and the TMCL user variables can be changed. Global parameters are related to the host interface, peripherals or application specific variables. -
Page 28: Ggp (Get Global Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.10 GGP (get global parameter) All global parameters can be read with this function. Global parameters are related to the host interface, peripherals or application specific variables. The different groups of these parameters are organized in banks to allow a larger total number for future products. -
Page 29: Stgp (Store Global Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.11 STGP (store global parameter) This command is used to store TMCL user variables permanently in the EEPROM of the module. Some global parameters are located in RAM memory, so without storing modifications are lost at power down. This instruction enables enduring storing. -
Page 30: Rsgp (Restore Global Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.12 RSGP (restore global parameter) With this command the contents of a TMCL user variable can be restored from the EEPROM. For all configuration-related axis parameters, non-volatile memory locations are provided. By default, most parameters are automatically restored after power up. -
Page 31: Rfs (Reference Search)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.13 RFS (reference search) The TMCM-1181 has a built-in reference search algorithm which can be used. The reference search algorithm provides switching point calibration and three switch modes. The status of the reference search can also be queried to see if it has already finished. -
Page 32: Sio (Set Input / Output)
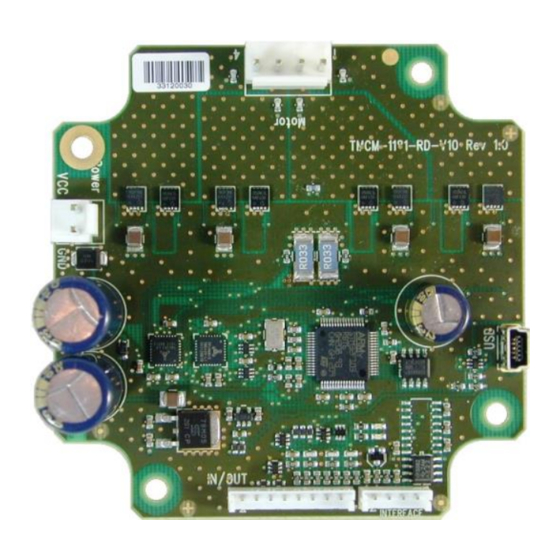
Function Target- Instruction Type Motor/ Operand Operand Operand Operand Number address Bank Byte3 Byte2 Byte1 Byte0 Value (hex) Motor Connector Power connector connector In/Out Interface connector connector OUT0 OUT1 Figure 3.1 TMCM-1181 connectors and location of general purpose outputs www.trinamic.com... - Page 33 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) OUTPUT COMMANDS AND Connector I/O port Command Range In / Out OUT0 SIO 0, 2, <n> In / Out OUT1 SIO 1, 2, <n> DDRESSING BOTH OUTPUT LINES WITH ONE COMMAND Set the type parameter to 255 and the bank parameter to 2.
-
Page 34: Gio (Get Input /Output)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.15 GIO (get input /output) With this command the status of all general purpose inputs IN0 .. IN4 of the module can be read out. The function reads a digital or analog input port. Digital lines will read as 0 or 1, while the ADC channels deliver their 12 bit result in the range of 0…... - Page 35 Figure 3.2 TMCM-1181 connectors and location of digital and analog general purpose inputs 3.5.15.1 I/O Bank 0 – Digital Inputs The ADIN lines can be read as digital or analogue inputs at the same time. The analogue values can be accessed in bank 1.
- Page 36 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.15.2 I/O Bank 1 – Analog Inputs The ADIN lines can be read back as digital or analogue inputs at the same time. The digital states can be accessed in bank 0.
-
Page 37: Calc (Calculate)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.16 CALC (calculate) A value in the accumulator variable, previously read by a function such as GAP (get axis parameter) can be modified with this instruction. Nine different arithmetic functions can be chosen and one constant operand value must be specified. -
Page 38: Comp (Compare)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.17 COMP (compare) The specified number is compared to the value in the accumulator register. The result of the comparison can for example be used by the conditional jump (JC) instruction. This command is intended for use in standalone operation only. -
Page 39: Jc (Jump Conditional)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.18 JC (jump conditional) The JC instruction enables a conditional jump to a fixed address in the TMCL program memory, if the specified condition is met. The conditions refer to the result of a preceding comparison. Please refer to COMP instruction for examples. -
Page 40: Ja (Jump Always)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.19 JA (jump always) Jump to a fixed address in the TMCL program memory. This command is intended for standalone operation only. The host address and the reply are only used to take the instruction to the TMCL program memory while the program loads down. -
Page 41: Csub (Call Subroutine)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.20 CSUB (call subroutine) This function calls a subroutine in the TMCL program memory. It is intended for standalone operation only. The host address and the reply are only used to take the instruction to the TMCL program memory while the program loads down. -
Page 42: Rsub (Return From Subroutine)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.21 RSUB (return from subroutine) Return from a subroutine to the command after the CSUB command. This command is intended for use in standalone mode only. The host address and the reply are only used to take the instruction to the TMCL program memory while the program loads down. -
Page 43: Wait (Wait For An Event To Occur)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.22 WAIT (wait for an event to occur) This instruction interrupts the execution of the TMCL program until the specified condition is met. This command is intended for standalone operation only. -
Page 44: Stop (Stop Tmcl Program Execution)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.23 STOP (stop TMCL program execution) This function stops executing a TMCL program. The host address and the reply are only used to transfer the instruction to the TMCL program memory. -
Page 45: Calcx (Calculate Using The X Register)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.24 CALCX (calculate using the X register) This instruction is very similar to CALC, but the second operand comes from the X register. The X register can be loaded with the LOAD or the SWAP type of this instruction. The result is written back to the accumulator for further processing like comparisons or data transfer. -
Page 46: Aap (Accumulator To Axis Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.25 AAP (accumulator to axis parameter) The content of the accumulator register is transferred to the specified axis parameter. For practical usage, the accumulator has to be loaded e.g. by a preceding GAP instruction. The accumulator may have been modified by the CALC or CALCX (calculate) instruction. -
Page 47: Agp (Accumulator To Global Parameter)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.26 AGP (accumulator to global parameter) The content of the accumulator register is transferred to the specified global parameter. For practical usage, the accumulator has to be loaded e.g. by a preceding GAP instruction. The accumulator may have been modified by the CALC or CALCX (calculate) instruction. -
Page 48: Cle (Clear Error Flags)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.27 CLE (clear error flags) This command clears the internal error flags. It is intended for use in standalone mode only and must not be used in direct mode. The following error flags can be cleared by this command (determined by the <flag> parameter): ALL: clear all error flags. -
Page 49: Vect (Set Interrupt Vector)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.28 VECT (set interrupt vector) The VECT command defines an interrupt vector. It needs an interrupt number and a label as parameter (like in JA, JC and CSUB commands). This label must be the entry point of the interrupt handling routine. -
Page 50: Ei (Enable Interrupt)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.29 EI (enable interrupt) The EI command enables an interrupt. It needs the interrupt number as parameter. Interrupt number 255 globally enables interrupts. Related command: DI, VECT, RETI Mnemonic: EI <interrupt number>... -
Page 51: Di (Disable Interrupt)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.30 DI (disable interrupt) The DI command disables an interrupt. It needs the interrupt number as parameter. Interrupt number 255 globally disables interrupts. Related command: EI, VECT, RETI Mnemonic: DI <interrupt number>... -
Page 52: Reti (Return From Interrupt)
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.31 RETI (return from interrupt) This command terminates the interrupt handling routine, and the normal program execution continues. At the end of an interrupt handling routine the RETI command must be executed. -
Page 53: Customer Specific Tmcl Command Extension (Uf0
The user definable functions UF0… UF7 are predefined, functions without topic for user specific purposes. Contact TRINAMIC for the customer specific programming of these functions. Internal function: Call user specific functions implemented in C by TRINAMIC. Related commands: none Mnemonic: UF0… UF7 Binary representation: INSTRUCTION NO. -
Page 54: Tmcl Control Functions
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 3.5.34 TMCL Control Functions The following functions are for host control purposes only and are not allowed for standalone mode. In most cases, there is no need for the customer to use one of those functions (except command 139). - Page 55 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Special reply format of command 136: Type set to 0 - reply as a string: Byte index Contents Host Address 2… 9 Version string (8 characters, e.g. 1181V1.26) There is no checksum in this reply format! Type set to 1 - version number in binary format: Please use the normal reply format.
-
Page 56: Axis Parameters
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 4 Axis parameters The following sections describe all axis parameters that can be used with the SAP, GAP, AAP, STAP and RSAP commands. Meaning of the letters in column Access: Access... - Page 57 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. Standby current The current limit two seconds after the motor 0… 255 4�� has stopped. �� =< ���������� >× �������� 2.8�� �� =< ���������� >×...
- Page 58 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. Step Step interpolation is supported with a 16 interpolation microstep setting only. In this setting, each enable step impulse at the input causes the execution of 16 times 1/256 microsteps.
- Page 59 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. smartEnergy Sets the number of stallGuard2™ readings 0… 3 current down above the upper threshold necessary for each step current decrement of the motor current.
- Page 60 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. short protection 0: Short to GND protection is on disable 1: Short to GND protection is disabled Use default value! Short detection 0: 3.2µs 0..3...
- Page 61 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. Referencing For the reference search this value directly 0… 2047 search speed specifies the search speed. Referencing Similar to parameter no. 194, the speed for the 0…...
- Page 62 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis Parameter Description Range [Unit] Acc. Power down Standstill period before the current is changed 1… 65535 delay down to standby current. The standard value is [10msec] 200 (value equates 2000msec).
-
Page 63: Stallguard2
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 4.1 stallGuard2 The module is equipped with TMC262 motor driver chip. The TMC262 features load measurement that can be used for stall detection. stallGuard2 delivers a sensorless load measurement of the motor as well as a stall detection signal. - Page 64 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Axis parameter Description The maximum value is 255. This value means 100% of the maximum current of the module. The current adjustment is within the range 0… 255 and can be adjusted in 32 steps (0…...
-
Page 65: Global Parameters
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 5 Global parameters Global parameters are grouped into 4 banks: bank 0 (global configuration of the module) bank 1 (user C variables) bank 2 (user TMCL variables) bank 3 (interrupt configuration) Please use SGP and GGP commands to write and read global parameters. - Page 66 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) Number Parameter Description Range Access ASCII mode Configure the TMCL ASCII interface: Bit 0: 0 – start up in binary (normal) mode 1 – start up in ASCII mode Bits 4 and 5: 00 –...
-
Page 67: Bank 1
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 5.2 Bank 1 The global parameter bank 1 is normally not available. It may be used for customer specific extensions of the firmware. Together with user definable commands (see section 7.3) these variables form the interface between extensions of the firmware (written in C) and TMCL applications. -
Page 68: Bank 3
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 5.4 Bank 3 Bank 3 contains interrupt parameters. Some interrupts need configuration (e.g. the timer interval of a timer interrupt). This can be done using the SGP commands with parameter bank 3 (SGP <type>, 3, <value>). The parameter number defines the priority of an interrupt. -
Page 69: Hints And Tips
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 6 Hints and Tips This chapter gives some hints and tips on using the functionality of TMCL, for example how to use and parameterize the built-in reference point search algorithm or the incremental sensOstep encoder. Further you will find basic information about stallGuard2 and coolStep. - Page 70 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) SAP 193, 0, 1 negative limit switch Search left stop switch only. SAP 193, 0, 2 negative limit switch positive limit switch Search right stop switch, then search left stop switch.
- Page 71 TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) SAP 193, 0, 5 negative limit switch positive limit switch home switch Search home switch in negative direction, reverse the direction when left stop switch reached. SAP 193, 0, 6 negative limit switch...
-
Page 72: Changing The Prescaler Value Of An Encoder
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 6.2 Changing the Prescaler Value of an Encoder TMCM-1181 offers an integrated sensOstep encoder. The built-in encoder has 1024 steps/rotation. For the operation with encoder please consider the following hints: ... -
Page 73: Life Support Policy
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 7 Life Support Policy TRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in life support systems, without the specific written consent of TRINAMIC Motion Control GmbH &... -
Page 74: Revision History
TMCM-1181 TMCL Firmware V1.26 Manual (Rev. 0.90 / 2013-APR-15) 8 Revision History 8.1 Firmware Revision Version Date Description 1.26 2012-APR-12 First release version Table 8.1 Firmware revision 8.2 Document Revision Version Date Author Description 0.90 2013-APR-15 Preliminary version Table 8.2 Document revision...
Need help?
Do you have a question about the TMCM-1181 and is the answer not in the manual?
Questions and answers