Advertisement
Table of Contents
Getting started
Y
OU NEED
-
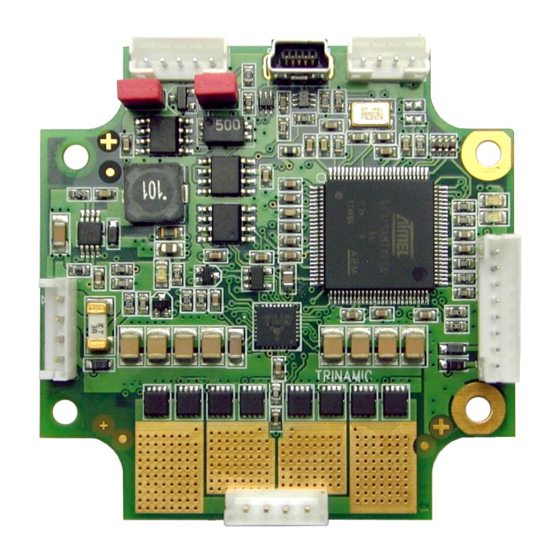
PD-1160
-
Serial interface: RS485, CAN, or USB
-
If you choose RS485 or CAN: interface
converter suitable to your module
-
Supply voltage: +24 V DC or +48 V DC
(9... 51 V DC)
-
Tmcl-Ide program and PC
-
Cables for interface and power
S
TARTING UP
1.
Choose your interface.
USB: connect USB interface to PC.
Download and install the file TMCM-
1160.inf
(www.trinamic.com)
connecting the power supply.
RS485
or
CAN:
connector and connect an interface
converter.
Connect the chosen interface to PC.
2.
Connect the power supply.
3.
Turn power ON. The green LED starts
flashing
slowly
and
powered but in standstill now. If this
does not occur, turn power OFF and
check
your
connections
supply!
4.
Start the TMCM-IDE program.
See next page how to configure the
connection and to use the IDE.
5.
Type in the open window:
ROL 0, 500
//Rotate motor 0 with speed 500
WAIT TICKS, 0, 500
MST 0
ROR 0, 250
//Rotate motor 0 with speed 250
WAIT TICKS, 0, 500
MST 0
6.
Click the Assemble icon. Thereafter click the Download icon to download the code to the module.
Click the Run icon. The program will now be executed.
7.
Click the Stop icon and start TMCL™ Direct Mode to issue the following commands:
ROR rotate right, motor 0, value 500 -> click Execute / The motor is rotating now.
MST motor stop, motor 0 -> click Execute / The motor stops now.
F
.
IRST STEPS ARE MADE
Please refer to the PD-1160 Hardware and Firmware Manuals, too.
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
www.trinamic.com
after
use
the
interface
the
motor
is
and
power
P
RECAUTIONS
-
Do not mix up connections or short-circuit pins.
-
Avoid bounding I/O wires with motor power
wires.
-
Do not exceed the maximum power supply of
+51 V DC!
-
Do not connect or disconnect the motor while
powered!
-
START WITH POWER SUPPLY OFF!
Converter
e.g. USB-2-485
CAN
Pin 2 CAN_L
Pin 1 CAN_H
Pin 3 GND
RS485
RS485
Pin 5 RS485-
Pin 4 RS485+
Pin 3 GND
POWER SUPPLY
Pin 1 V
Driver
Pin 2 V
Logic
Pin 1 Shutdown
Pin 4 GND
PD-1160
Serial USB
interface
Converter
e.g. USB-2-X
1
1
USB
Interface
S/D
1
1
1
Motor
1
QSH5718
QSH6018
Advertisement
Table of Contents

Related Manuals for Trinamic PD-1160
















Summary of Contents for Trinamic PD-1160
- Page 1 ROR rotate right, motor 0, value 500 -> click Execute / The motor is rotating now. MST motor stop, motor 0 -> click Execute / The motor stops now. IRST STEPS ARE MADE Please refer to the PD-1160 Hardware and Firmware Manuals, too. TRINAMIC Motion Control GmbH & Co. KG Hamburg, Germany...
- Page 2 Stop and start Direct Mode by clicking the appropriate icon. Choose COM port and Type. Click OK. The PD-1160 is automatically detected, if the communication is established. Issue a command by choosing Instruction, Type, Motor, and Value and click Execute to send it to the module.
Need help?
Do you have a question about the PD-1160 and is the answer not in the manual?
Questions and answers