Advertisement
Table of Contents
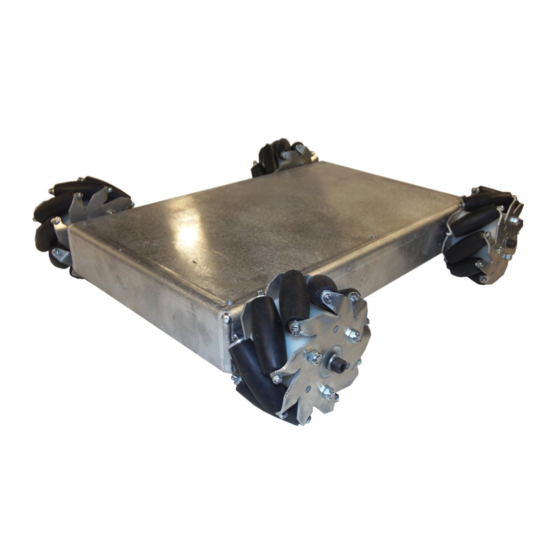
Mecanum Wheel Vectoring Robot
Platform – IG32 DB
Assembly and Operation
This is a direct drive 4WD base robot kit that uses Nexus mecanum wheels and hubs.
It's a great robot platform for indoor robotics. It can vector in any direction.
Images shown may not be an exact representation of the robot's features listed in this document
Advertisement
Table of Contents

Subscribe to Our Youtube Channel
Related Manuals for SuperDroid Robots IG32 DB










Summary of Contents for SuperDroid Robots IG32 DB
- Page 1 Mecanum Wheel Vectoring Robot Platform – IG32 DB Assembly and Operation This is a direct drive 4WD base robot kit that uses Nexus mecanum wheels and hubs. It's a great robot platform for indoor robotics. It can vector in any direction.
- Page 2 Mecanum Wheel Vectoring Robot Platform – IG32 DB Contents Mechanical Assembly ..............................3 Electrical Assembly ............................... 5 Operation ..................................6 General Terms................................6 SuperDroid Robots, Inc Contact 224 Technology Park Lane (919) 557-9162 Fuquay Varina, NC 27526 SDR@SDRobots.com www.SuperDroidRobots.com Revised: April 25, 2018...
- Page 3 Mecanum Wheel Vectoring Robot Platform – IG32 DB Mechanical Assembly Start by mounting the motors to the chassis using the M3x8 screws. Use Loctite to insure the screws do not vibrate loose. 2. Slide the steel hub onto the motor shaft so that it is very close the chassis and the screw heads but not touching.
- Page 4 Mecanum Wheel Vectoring Robot Platform – IG32 DB 3. Before mounting the wheels, note that they need to be oriented correctly for the robot to work properly. See the figure below for the correct orientation. 4. Now slide the wheel on over the hub, slide the aluminum washer in the other side of the wheel, and pinch in place using the socket head screw and lockwasher.
- Page 5 Mecanum Wheel Vectoring Robot Platform – IG32 DB Mark the holes for the motor controller and drill them out to 1/8”. Use the hardware in the provided hardware kit to mount it. Mark and drill a hole to mount the fuse block (also 1/8”).
- Page 6 2. SuperDroid Robots, Inc. makes no representations as to the fitness of its products for specific uses. ANY IMPLIED WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE IS HEREBY EXCLUDED.
Need help?
Do you have a question about the IG32 DB and is the answer not in the manual?
Questions and answers