Advertisement
Quick Links
Advertisement

Subscribe to Our Youtube Channel
Related Manuals for Artec Robotist Transporter












Summary of Contents for Artec Robotist Transporter
- Page 1 Transporter Assembly Instructions Assembly Instructions...
- Page 2 Transporter Components Studuino Unit Studuino Unit Studuino Unit Studuino Unit Studuino Unit Battery Box Battery Box Battery Box Battery Box Battery Box USB Cable USB Cable x x DC Motor DC Motor DC Motor DC Motor DC Motor Sensor Connecting Cable Sensor Connecting Cable (three-wire 15 cm) (three-wire 15 cm) x x x x x Basic Cube (white) Basic Cube (white) Reflective Infrared Sensor Reflective Infrared Sensor Touch Sensor Touch Sensor Triangle A (gray) Triangle A (gray) IR Photoreflector Touch Sensor x...
- Page 3 Transporter Body Assembly (bottom) x x x x ① Make sure the Studuino unit is in the correct orientation! ②...
- Page 4 Transporter ③ Completed Body (bottom)
-
Page 5: Assembling The Motor
Transporter Assembling the Motor x x x x ① Connect the assembled DC Motor to M2. Make sure the cables are inserted correctly! Slip the O-ring onto the grooves of the wheel. - Page 6 Transporter ② Connect the assembled DC Motor to M1. Make sure the cables are inserted correctly! Slip the O-ring onto the grooves of the wheel. Completed Motor...
- Page 7 Transporter Body Assembly (front) x x x x x x x x ①...
- Page 8 Transporter ② Connect the touch sensor to A4. Sensor Connecting Cable Sensor side Circuit board side Touch Sensor Black Black Gray Gray Make sure the cables Make sure the cables are are inserted correctly! inserted correctly! ③ Connect the reflective infrared sensor (IR Photoreflector) to A2. Black Black Gray Gray IR Photoreflector Make sure blocks are inserted correctly! Make sure the cables are inserted correctly!
- Page 9 Transporter ④ Connect the reflective infrared sensor (IR Photoreflector) to A3. Black Black Gray Gray IR Photoreflector Make sure blocks are Make sure the cables are inserted correctly! inserted correctly! ⑥ ⑤ You should see the battery box switch here.
- Page 10 Transporter ⑦ Connect the cable from the battery box to the POWER section. POWER POWER Make sure the cables are inserted correctly! ⑧ Completed Body (front) Make sure the sensor cables are on the sides of the car body.
- Page 11 Transporter Assembling the Head and Arms x x x x x x x ① Attach first.
- Page 12 Transporter ② Rotor axis stud should be inserted into the side. Make sure blocks are inserted correctly! ③ Rotor axis stud should be inserted into the side. Make sure blocks are inserted correctly!
- Page 13 Transporter ④ Left Side Half B (blue) Half C (light aqua) Touch sensor Do not insert the Half B (blue) studs into Half C (light aqua). Push the Half B (blue) block down with your finger, as illustrated, so that it is pushing down on Half C (light aqua). Half C (light aqua) should be inserted into the touch sensor.
-
Page 14: Replacing The Batteries
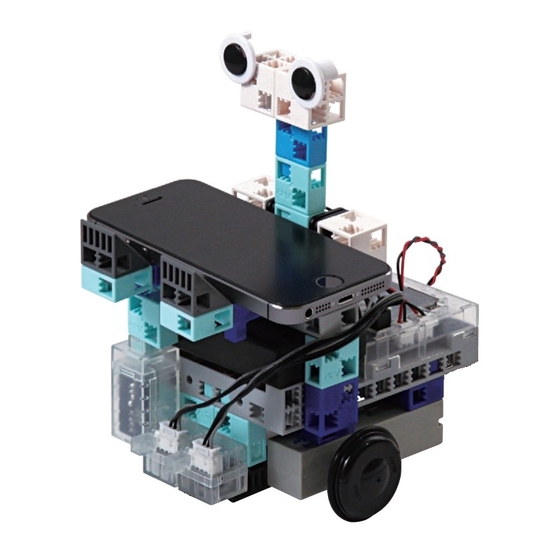
Transporter Replacing the Batteries ① ② ③ ④ ⑤ Use a screwdriver (Phillips #1) to open. Insert batteries in the correct polarity. Put the lid of the battery box back in place. - Page 15 Transporter Completed Transporter Be cautious of cables that could become entangled in the moving parts of the motor and cause the robot to disconnect. Arrange cables with caution. Before operating your robot, check the assemby instructions again to confirm your robot has been assembled correctly. Front Left Rear Right...
- Page 16 Transporter Making Your Transporter Run Install the software from the URL below to setup the Studuino Programming Environment. ★ Proceed to Step 1 when software installation is complete. http://www.artec-kk.co.jp/studuino/ ① Connect the USB cable to the PC and the Studuino unit. Refer to 1.3. About Studuino in Studuino Programming Environment Manual for more details. ② Download the program file Transporter.ipd from the URL below in the Robotist section. http://www.artec-kk.co.jp/robotist/ ③ Open the downloaded file. ④ Transfer the program to the Studuino unit by clicking the Transfer button . ⑤ Remove the USB cable from the Studuino unit. ...
- Page 17 Transporter Making Your Transporter Run ⑥ On the last page of the instructions there is an A4 size printout of a run course for your robot. If you cannot print out the course, you can draw your own. Draw the lines of the run course using a thick, black marker and white paper. The thickness of the lines should be between 5 mm and 10 mm. Your robot cannot make sharp turns. ⑦ Place the robot onto the course where the left and right reflective infrared sensor can detect the course line. ⑧ Turn the switch on the battery box to ON. ⑨ When the touch sensor is on, the robot will detect objects placed in its arms and run along the track.
-
Page 18: Sensor Calibration
Transporter Sensor Calibration Some sensors may not function properly after you run the program for the first time. If the sensors are malfunctioning, calibrate the sensor settings. Click the sensor icon in the box and you can adjust the range settings in the condition box below. Drag the mouse left or right to adjust the range settings. Refer to the Condition Icon sections in 4.4. The Attribute Field of the Studuino Programming Environment Manual for more details. - Page 19 Transporter Robot Course...
Need help?
Do you have a question about the Robotist Transporter and is the answer not in the manual?
Questions and answers