
Subscribe to Our Youtube Channel
Related Manuals for GeoSlam ZEB-REVO







Summary of Contents for GeoSlam ZEB-REVO
- Page 1 Copyright ZEB-REVO™ User’s Manual © 2017 GeoSLAM Ltd. All rights reserved. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 2 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 3: Table Of Contents
Survey areas with restricted or difficult access ........... 17 Moving objects in the environment ..............17 Data Processing ......................19 GeoSLAM Hub Software ..................19 Flag for Support ....................20 Output and Processing Options Tab ................23 Output Options Tab ..................... 23 Output File Configuration .................. - Page 4 13.4 Battery care ......................57 13.5 Transportation ..................... 58 APPENDICES ....................... 59 14.1 Appendix 1 – GeoSLAM Data Set Flagging ............59 14.2 Appendix 2 - USB Prepare tool ................63 14.3 Appendix 3 – Dimensional drawings ..............65 14.4 Appendix 4 –...
-
Page 5: Introduction
INTRODUCTION The ZEB-REVO portable laser scanner provides a rapid and simple means of capturing 3D point cloud data. Data is captured as the user walks through the area of interest. The ZEB- REVO negates the need for time consuming scanner set-ups and data registration associated with traditional terrestrial laser scanning methods. -
Page 6: Principal Of Operation
PRINCIPAL OF OPERATI ON The ZEB-REVO consists of a 2D time-of-flight laser range scanner rigidly coupled to an inertial measurement unit (IMU) mounted on a motor drive. The motion of the scanning head on the motor drive provides the third dimension required to generate 3D information. -
Page 7: List Of Parts
LIST OF PARTS Part no. Description 1 GS_610042 ZEB-REVO hand held laser scanner 2 GS_610048 ZEB-DL2600 data logger 3 GS_610008 ZEB-REVO main cable 4 GS_610024 ZEB-DL2600 download cable 5 GS_USB USB memory stick 6 MAX_KEY_942000072007 GeoSLAM Hub licence dongle 7 DEB_BAT_CH... - Page 8 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 9: Safety
SAFETY GENERAL SAFETY The ZEB-REVO Portable Mapping System should only be used by trained operators. Always follow basic safety precautions when operating the ZEB-REVO Portable Mapping System to reduce the risk of personal injury and to prevent damage to the equipment. Do not operate the equipment with suspected defects or obvious mechanical damage. -
Page 10: Battery Safety
WEEE. INSTALLATION The ZEB-REVO can be used as a handheld device using the supplied removable handle or can be mounted to mobile platform using the supplied mounting plate (see Section 14.3). FURTHER HELP AND INFORMATION... -
Page 11: Data Capture
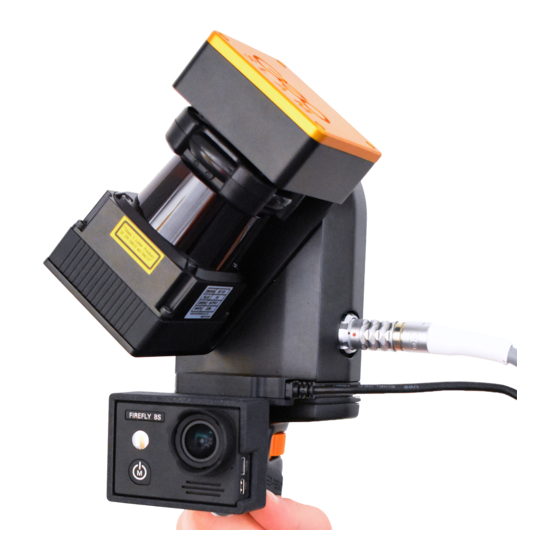
CONNECTING THE HARDW ARE Connect the ZEB-REVO main cable to the socket on the side of ZEB-REVO scanner head. Connect the other end of the ZEB-REVO cable to the ZEB (white) socket on the DL2600 data logger. DO NOT attempt to connect the ZEB-REVO cable (12 pin) to the AUX socket (14 pin- with blue marker) Connect the DL2600 battery connector to the external battery. - Page 12 After the ZEB-REVO scanner has been in initialisation mode for 15 seconds the LED will switch to green – Scanning Step mode. Press the motor start/stop button on the side of the scanner head to start the scanner rotation and commence the survey.
-
Page 13: Downloading The Raw Scan Data
To shut the DL2600 data logger down press and hold the power button for 1 second. After the data logger is shut down the battery cable should be disconnected from the battery to prevent the battery from being drained. Disconnect the battery when not in use © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 14 Error – scanner not detected Red flash x 2 Error – IMU not detected Red flash x 3 Error – neither scanner or IMU detected Table 3-1: ZEB-REVO LED status summary AUX LED Description Green Copying data to USB memory stick ...
-
Page 15: Usage Guidelines
• Ensure that whatever limited features are available are scanned repeatedly as you move through the environment by pointing the ZEB-REVO in the direction of the feature. By doing so more measurement points are made of the feature increasing the likelihood that it will be used by the SLAM algorithm. This is particularly important when the feature is at long range (>10m), e.g. -
Page 16: Transitioning Between Environments
(indoors with good target reflectivity). The typical maximum range will be 15- 20m in most conditions. It is recommended that the range is kept to less than 10m where possible to ensure good point density and to assist the SLAM algorithm. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... -
Page 17: Duration Of Scanning
If people are required to follow the operator they should ideally maintain a distance of 20m or more from the operator. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 18 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 19: Data Processing
DATA PROCESSING It is necessary to process the raw data collected by the ZEB-REVO portable mapping system using GeoSLAM’s novel 3D SLAM algorithm to generate a 3D point cloud of the environment that has been mapped. This is done using the GeoSLAM Hub processing software. -
Page 20: Flag For Support
Save the results folder to another location (in order to access the point cloud data files). The results files are described in more detail in Chapters 6 and 8. View the data in GeoSLAM Viewer (provided this option was enabled before processing). The GeoSLAM Viewer is described in more detail in Chapter 7. - Page 21 If you find an error in a processed dataset, this can be reported to GeoSLAM support through the ZEB-REVO Uploader desktop application. Only accounts with a valid maintenance and support contract will be eligible for data support. See Appendix 1 – GeoSLAM Data Set Flagging ©...
- Page 22 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 23: Output And Processing Options Tab
The OUTPUT tab (Figure 6-1) enables users to: Select the configuration of point clouds output after processing Enable or disable output of files for the GeoSLAM viewer Enable or disable processing of ZEB-CAM video data for inclusion in the GeoSLAM viewer files (so called Videolink) Figure 6-1... - Page 24 If multiple PLY files have been defined the user must select the desired ply file to use in the viewer. The viewer will generate simple “floor plan” views for each discernible floor that was scanned. These floor plans are generated primarily for use when displaying the contextual © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 25: Point Colouriser
ZEB-CAM. It is not possible to colourise all the points. Two options are provided, coloured points only or coloured points + “un- coloured” points (with shaded grey scale colour) © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 26 A Drag and Drop box has been added to attach the corresponding ZEB-CAM video file(s). A video file must be provided to enable processing of data with colourisation by ZEB-CAM selected. Point colourisation will typically double the processing time. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 27: Processing Options Tab
Reduce the bounding box if small spaces have been scanned Process in reverse This option will process the data set in reverse. This option can sometimes be used to fix data sets that do not process correctly in the forwards direction. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 28 Convergence threshold Increasing this parameter increases the maximum number of iterations for each processing step and reduces the convergence threshold during the local registration phase. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 29 Reducing this parameter has the opposite effect. algorithm will be more influenced by the laser point data than the raw inertial data from the IMU Range -5 to +5 (default 0) © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 30 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 31: Geoslam Viewer
GEOSLAM VIEWER The GeoSLAM Viewer has two modes, 2D and 3D. 2D MODE In 2D mode (Figure 7-1) an image of a horizontal slice from the point cloud at the height of the trajectory (floor plan) is presented. If multiple floors have been detected an image for the floor is presented. -
Page 32: Mode
Press the H key to open the Navigation Help menu. The following keys can also be used: B – Toggles background colour from black to white M – Cycles point size through 4 point sizes Figure 7-2 VIEWER ANNOTATION © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 33 Note. A dialogue box will appear requesting a Title and Description for the Note. Click Save to add the Note. icon is displayed in the location of the Note. Click on the Note to display the Title and Description. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 34 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 35: Results Folder
Each file name is prefixed by the file name of the ZEB data set that has been processed, followed by descriptors defining the configuration of the file (Figure 8-1). There are a number of default files that are also saved because they are required for other GeoSLAM Hub Option Descriptor... - Page 36 Scanner x coordinate in metres relative to scan origin Scanner y coordinate in metres relative to scan origin Scanner z coordinate in metres relative to scan origin Orientation quaternion Orientation quaternion Orientation quaternion Orientation quaternion Userfields Currently unused Table 8-2 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 37 Image number Image Image filename as stored in the filename filename _results\viewerData\thumbnails folder Table 8-3 For more information regarding the use of ZEB-CAM please refer to the separate ZEB- CAM User Manual © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 38 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 39: More Files
MORE FILES Data sets processed in GeoSLAM Hub V4.0 (or higher) can be reprocessed to generate different output files without having to run the full SLAM processing step. The More Files button against each data set can be used to select a different set of output file formats and specification (point colour, decimation, etc). - Page 40 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 41: Data Set Merger
DATA SET MERGER Data sets processed in GeoSLAM Hub V4.0 (or higher) can be aligned and merged with other data sets using the Data Set Merger feature. This feature performs a non-rigid registration of two or more ZEB data sets. -
Page 42: Manual Coarse Alignment
MANUAL COARSE ALIGNM ENT After clicking the START MERGE button a graphical display window is opened and the selected data sets are loaded in plan view as shown in Figure 10-3. Figure 10-3 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 43 The currently active data set can be translated and rotated about the Z axis using the right and left mouse buttons respectively. The entire view can be zoomed in and out using the mouse scroll wheel and panned using the middle mouse button. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 44 Translate and rotate the currently active (red) scan away from the others as shown in Figure 10-5 Figure 10-5 Select the next scan and translate and rotate to approximately align with the first scan as show in Figure 10-6. Figure 10-6 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 45 Start Merge button. The graphical display window will close and the merge algorithm will perform a non-rigid registration of the coarsely aligned data sets. When the merge processing is the file will be saved in the geoslam-processing folder. The default name for the results folder is yyyy-mm-dd-hh-mm-ss_merge_results where the date and time are the date and time the merge was performed.
- Page 46 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 47: Geoslam Draw
Draw is based on the PointCab Suite point cloud processing application. To open a dataset in GeoSLAM Draw, click the DRAW button below the target dataset of the DATA page (see Figure 11-1). A dialogue box confirming that you wish to create a GeoSLAM Draw project files is displayed (Figure 11-2). - Page 48 Figure 11-4 Once a valid license file has been installed the dataset will be converted to GeoSLAM Draw format and a GeoSLAM Draw window ill open with the dataset loaded (see Figure 11-5). Figure 11-5 ©...
- Page 49 A series of GeoSLAM Draw instruction videos covering the following topics are available on via the following links: Installing a licence file Basics – loading a project - from GeoSLAM Hub and files Moving around – zoom, moving views, tilled view...
- Page 50 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 51: Advanced Settings
Resets all settings top the factory install. • Downloading the support log file (if requested by the GeoSLAM support team) Allows you to save a copy of your log file to send to GeoSLAM staff when instructed to do so. © 2017 GeoSLAM Ltd... - Page 52 Figure 12-1 It should only be necessary to use this page if requested to do so by the GeoSLAM Support Team. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 53: Virtual Machine Optimization
12.2 VIRTUAL MACHINE OPTI MIZATION The GeoSLAM virtual machine running in VirtualBox can be optimized to make use of all of your machine’s resources. You should only conduct optimization in consultation with the GeoSLAM Support Team. The optimization process is carried out from the VirtualBox Manager window. To open the... - Page 54 Click on the Settings icon in the toolbar and select System (Figure 12-4). To optimize the Base Memory, click and drag the blue slider to the furthest extent of the green range, without entering into the orange/red range (Figure 12-5). Figure 12-4 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 55 Once both the motherboard and processor have been optimized, click ‘OK’ to save the changes. Restart the GeoSLAM Hub application either by clicking on the GeoSLAM Hub icon or from the GeoSLAM program group (search GeoSLAM Hub in the Windows Start Menu).
-
Page 56: Further Help And Information
12.3 FURTHER HELP AND INFORMATION Contact GeoSLAM by any of the following methods: Phone: +44 1949 831814 General email: info@geoslam.com Support email: support@geoslam.com Website: www.geoslam.com © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... -
Page 57: Battery
20-50% capacity 2 red LEDs 10-20% capacity 1 red LED <10% capacity No LED 13.4 BATTERY CARE DO NOT dispose of in normal household waste. DO NOT attempt to dismantle the battery. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... -
Page 58: Transportation
Special rules may apply to the transportation of spare batteries. It is recommended that you check with your local air transportation safety authority and/or the proposed air carrier for specific requirements on lithium battery transportation. Disconnect the battery during transportation © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... -
Page 59: Appendices
GeoSLAM Cloud processing server using the ZEB Uploader application. After uploading to the Cloud server, a Flag Data icon can be activated to alert GeoSLAM support team that there is a problem with the dataset. Problem datasets are investigated during regular UK office hours. - Page 60 Figure 14-1 The application will open on the Upload page (see Figure 14-2). © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 61 Upload page. After the file(s) have been selected the application automatically switches to the Current Uploads page and progress bar(s) are displayed showing the progress of each file upload (see Figure 14-3). © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 62 Problem datasets are investigated during regular UK office hours. A member of the GeoSLAM support team will contact you by email and advise why the error occurred and whether it has been possible to fix the dataset.
-
Page 63: Appendix 2 - Usb Prepare Tool
14.2 APPENDIX 2 - USB PREPARE TOO L The USB Prepare application in the Tools folder in the GeoSLAM Windows Program Group enables users to perform some basic interaction with the ZEB DL-2600 data logger. The Program Group is accessed via the Windows Start button. - Page 64 Figure 14-5 © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 65: Appendix 3 - Dimensional Drawings
14.3 APPENDIX 3 – DIMENSIONAL DRAWINGS Dimensional drawings with optional mounting plate on rear face © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0... - Page 66 Dimensional drawings with optional mounting plate on bottom face © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
-
Page 67: Appendix 4 - End User License Agreement
"Licensee" means the person to whom the Licensor grants a right to use the Software under this EULA; "Licensor" means GeoSLAM Limited, a company incorporated in England and Wales (registration number7824395) having its registered office at Unit 1 Moorbridge Court, Bingham, NG13 8GG, UK;... - Page 68 No assignment of Intellectual Property Rights Nothing in this EULA shall operate to assign or transfer any Intellectual Property Rights from the Licensor to the Licensee or from the Licensee to the Licensor. Warranties © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 69 The Licensor will not be liable to the Licensee in respect of any losses arising out of a Force Majeure Event. The Licensor will not be liable to the Licensee in respect of any loss of profits or anticipated savings. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 70 (iii) that other party is the subject of a bankruptcy petition or order. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 71 The rights of the parties to terminate, rescind, or agree any amendment, waiver, variation or settlement under or relating to this EULA are not subject to the consent of any third party. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
- Page 72 The Clause headings do not affect the interpretation of this EULA. 12.3 In this EULA, general words shall not be given a restrictive interpretation by reason of being preceded or followed by words indicating a particular class of acts, matters or things. © 2017 GeoSLAM Ltd ZEB-REVO User Manual v3.0.0...
Need help?
Do you have a question about the ZEB-REVO and is the answer not in the manual?
Questions and answers