
Related Manuals for Mitsubishi MR-J4-10A










Summary of Contents for Mitsubishi MR-J4-10A
- Page 1 General-Purpose AC Servo General-Purpose Interface AC Servo MODEL MR-J4-_A(-RJ) MR-J4-_A4(-RJ) SERVO AMPLIFIER INSTRUCTION MANUAL...
-
Page 2: Safety Instructions
Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment correctly, do not attempt to install, operate, maintain, or inspect the equipment until you have read through this Instruction Manual, Installation guide, and appended documents carefully. Do not use the equipment until you have a full knowledge of the equipment, safety information and instructions. - Page 3 1. To prevent electric shock, note the following WARNING Before wiring and inspections, turn off the power and wait for 15 minutes or more until the charge lamp turns off. Then, confirm that the voltage between P+ and N- is safe with a voltage tester and others. Otherwise, an electric shock may occur.
- Page 4 3. To prevent injury, note the following CAUTION Only the voltage specified in the Instruction Manual should be applied to each terminal. Otherwise, a burst, damage, etc. may occur. Connect cables to the correct terminals. Otherwise, a burst, damage, etc. may occur. Ensure that polarity (+/-) is correct.
- Page 5 (2) Wiring CAUTION Wire the equipment correctly and securely. Otherwise, the servo motor may operate unexpectedly. Do not install a power capacitor, surge killer, or radio noise filter (FR-BIF-(H) option) on the servo amplifier output side. To avoid a malfunction, connect the wires to the correct phase terminals (U, V, and W) of the servo amplifier and servo motor.
- Page 6 CAUTION Use a noise filter, etc. to minimize the influence of electromagnetic interference. Electromagnetic interference may be given to the electronic equipment used near the servo amplifier. Burning or breaking a servo amplifier may cause a toxic gas. Do not burn or break it. Use the servo amplifier with the specified servo motor.
- Page 7 DISPOSAL OF WASTE Please dispose a servo amplifier, battery (primary battery) and other options according to your local laws and regulations. EEP-ROM life The number of write times to the EEP-ROM, which stores parameter settings, etc., is limited to 100,000. If the total number of the following operations exceeds 100,000, the servo amplifier may malfunction when the EEP-ROM reaches the end of its useful life.
- Page 8 «Wiring» Wires mentioned in this Instruction Manual are selected based on the ambient temperature of 40 °C. «U.S. customary units» U.S. customary units are not shown in this manual. Convert the values if necessary according to the following table. Quantity SI (metric) unit U.S.
- Page 9 MEMO A - 8...
-
Page 10: Table Of Contents
CONTENTS 1. FUNCTIONS AND CONFIGURATION 1- 1 to 1-44 1.1 Summary............................1- 1 1.2 Function block diagram........................1- 2 1.3 Servo amplifier standard specifications .................... 1- 9 1.4 Combinations of servo amplifiers and servo motors ............... 1-13 1.5 Function list............................1-14 1.6 Model designation.......................... - Page 11 3.8 Alarm occurrence timing chart ......................3-56 3.8.1 When you use the forced stop deceleration function..............3-56 3.8.2 When you do not use the forced stop deceleration function............. 3-57 3.9 Interfaces ............................3-58 3.9.1 Internal connection diagram...................... 3-58 3.9.2 Detailed explanation of interfaces..................... 3-59 3.9.3 Source I/O interfaces ........................
- Page 12 5. PARAMETERS 5- 1 to 5-58 5.1 Parameter list............................ 5- 1 5.1.1 Basic setting parameters ([Pr. PA_ _ ])..................5- 2 5.1.2 Gain/filter setting parameters ([Pr. PB_ _ ]) ................5- 3 5.1.3 Extension setting parameters ([Pr. PC_ _ ]) ................5- 5 5.1.4 I/O setting parameters ([Pr.
- Page 13 7.3.1 Vibration tough drive function....................7-23 7.3.2 Instantaneous power failure tough drive function ..............7-25 7.4 Compliance with SEMI-F47 standard ....................7-28 8. TROUBLESHOOTING 8- 1 to 8- 8 9. OUTLINE DRAWINGS 9- 1 to 9-20 9.1 Servo amplifier ..........................9- 1 9.2 Connector ............................
- Page 14 11.9 Selection example of wires ......................11-56 11.10 Molded-case circuit breakers, fuses, magnetic contactors (recommended) ......11-60 11.11 Power factor improving DC reactors................... 11-62 11.12 Power factor improving AC reactors ................... 11-66 11.13 Relays (recommended) ......................11-69 11.14 Noise reduction techniques ......................11-70 11.15 Earth-leakage current breaker ....................
- Page 15 13.3.2 External I/O signal connection example using an MR-J3-D05 safety logic unit ....13- 7 13.3.3 External I/O signal connection example using an external safety relay unit ......13- 9 13.4 Detailed description of interfaces ....................13-10 13.4.1 Sink I/O interface........................13-10 13.4.2 Source I/O interface ......................
- Page 16 15.3.5 Function..........................15-21 15.3.6 Absolute position detection system..................15-24 15.4 Characteristics ..........................15-25 15.4.1 Overload protection characteristics ..................15-25 15.4.2 Power supply capacity and generated loss ................15-26 15.4.3 Dynamic brake characteristics ....................15-27 15.4.4 Permissible load to motor mass ratio when the dynamic brake is used....... 15-28 16.
- Page 17 App. 4 Compliance with global standards ..................App.- 3 App. 5 MR-J3-D05 Safety logic unit ....................App.-19 App. 6 EC declaration of conformity ....................App.-37 App. 7 Analog monitor ........................App.-39 App. 8 Two-wire type encoder cable for HG-MR/HG-KR..............App.-43 App. 9 How to replace servo amplifier without magnetic pole detection......... App.-44...
-
Page 18: Functions And Configuration
1. FUNCTIONS AND CONFIGURATION 1.1 Summary The Mitsubishi MELSERVO-J4 series general-purpose AC servo has further higher performance and higher functions compared to the previous MELSERVO-J3 series. The MELSERVO-J4 series compatible rotary servo motor is equipped with 22-bit (4194304 pulses/rev) high- resolution absolute encoder. -
Page 19: Function Block Diagram
1. FUNCTIONS AND CONFIGURATION 1.2 Function block diagram The function block diagram of this servo is shown below. POINT The diagram shows MR-J4-_A_-RJ as an example. The MR-J4-_A_ servo amplifier does not have the CN2L connector. (1) 200 V class (a) MR-J4-500A(-RJ) or less (Note 6) Power factor improving... - Page 20 1. FUNCTIONS AND CONFIGURATION Note 1. The built-in regenerative resistor is not provided for MR-J4-10A(-RJ). 2. For 1-phase 200 V AC to 240 V AC, connect the power supply to L1 and L3. Leave L2 open. For the power supply specifications, refer to section 1.3.
- Page 21 1. FUNCTIONS AND CONFIGURATION (b) MR-J4-700A(-RJ) (Note 4) Power factor improving Regenerative DC reactor option Servo amplifier P4 (Note 2) Servo motor Dynamic Diode brake stack Relay circuit MCCB (Note 1) Current Power encoder Regene- supply rative CHARGE lamp Cooling fan Electromagnetic Control 24 V DC...
- Page 22 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-11KA(-RJ)/MR-J4-15KA(-RJ)/MR-J4-22KA(-RJ) (Note 5) External regenerative (Note 4) resistor or Power factor improving regenerative option DC reactor External dynamic brake (optional) Servo amplifier Servo motor (Note 2) Diode stack Thyristor MCCB (Note 1) Current Power encoder Regene- supply rative...
- Page 23 1. FUNCTIONS AND CONFIGURATION (2) 400 V class (a) MR-J4-350A4(-RJ) or less (Note 5) Power factor Regenerative improving option DC reactor Servo amplifier Servo motor P4 (Note 3) Dynamic Diode brake Relay stack circuit MCCB (Note 1) Current Power Regene- detector supply rative...
- Page 24 1. FUNCTIONS AND CONFIGURATION (b) MR-J4-500A4(-RJ)/MR-J4-700A4(-RJ) (Note 4) Power factor Regenerative improving option DC reactor Servo amplifier Servo motor P4 (Note 2) Dynamic Diode brake stack Relay circuit MCCB (Note 1) Current Power Regene- detector supply rative Charge lamp Cooling fan Control Electromagnetic 24 V DC...
- Page 25 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-11KA4(-RJ)/MR-J4-15KA4(-RJ)/MR-J4-22KA4(-RJ) (Note 5) External Power factor regenerative resistor (Note 4) improving regenerative option DC reactor External dynamic brake (optional) Servo amplifier P3 Servo motor P4 (Note 2) Diode Thyristor stack MCCB (Note 1) Current Power Regene- detector supply...
-
Page 26: Servo Amplifier Standard Specifications
External option (Note 8) Fully closed loop control Available (Note 9) Load-side encoder interface Mitsubishi high-speed serial communication (Note 10) USB: Connection to a personal computer or others (MR Configurator2-compatible) Communication function RS-422: 1:n communication (up to 32 axes) (Note 7) - Page 27 1. FUNCTIONS AND CONFIGURATION 100A 200A 350A 500A 700A 11KA 15KA 22KA Model: MR-J4- (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) LVD: EN 61800-5-1 Compliance to CE marking EMC: EN 61800-3 global standards MD: EN ISO 13849-1, EN 61800-5-2, EN 62061 UL standard UL 508C Structure (IP rating)
- Page 28 Fully closed loop control Compatible Scale measurement function Not compatible Load-side encoder interface (Note 5) Mitsubishi high-speed serial communication USB: connection to a personal computer or others (MR Configurator2-compatible) Communication function RS-422: 1 : n communication (up to 32 axes) Encoder output pulses...
- Page 29 1. FUNCTIONS AND CONFIGURATION 60A4 100A4 200A4 350A4 500A4 700A4 11KA4 15KA4 22KA4 Model: MR-J4- (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) (-RJ) LVD: EN 61800-5-1 Compliance to CE marking EMC: EN 61800-3 standards MD: EN ISO 13849-1, EN 61800-5-2, EN 62061 UL standard UL 508C Natural cooling, open...
-
Page 30: Combinations Of Servo Amplifiers And Servo Motors
(1) 200 V class Rotary servo motor HG-JR Linear servo motor Direct Servo amplifier (When the (primary side) drive motor HG-KR HG-MR HG-SR HG-UR HG-RR HG-JR maximum torque is 400%) MR-J4-10A(-RJ) MR-J4-20A(-RJ) LM-U2PAB-05M-0SS0 TM-RFM002C20 LM-U2PBB-07M-1SS0 MR-J4-40A(-RJ) LM-H3P2A-07P-BSS0 TM-RFM004C20 LM-H3P3A-12P-CSS0 LM-K2P1A-01M-2SS1 LM-U2PAD-10M-0SS0 LM-U2PAF-15M-0SS0... -
Page 31: Function List
1. FUNCTIONS AND CONFIGURATION 1.5 Function list The following table lists the functions of this servo. For details of the functions, refer to each section indicated in the detailed explanation field. Detailed Function Description explanation Section 3.2.1 Position control mode This servo is used as a position control servo. - Page 32 1. FUNCTIONS AND CONFIGURATION Detailed Function Description explanation Output signal selection The output devices including MBR (Electromagnetic brake interlock) can be assigned [Pr. PD23] to (device settings) to certain pins of the CN1 connector. [Pr. PD28] Output signal can be forced on/off independently of the servo status. Output signal (DO) forced Section 4.5.8 output...
-
Page 33: Model Designation
1. FUNCTIONS AND CONFIGURATION 1.6 Model designation (1) Rating plate The following shows an example of rating plate for explanation of each item. AC SERVO SER.S21001001 Serial number MODEL MR-J4-10A Model Capacity POWER : 100W Applicable power supply INPUT : 3AC/AC200-240V 0.9A/1.5A 50/60Hz... -
Page 34: Structure
1. FUNCTIONS AND CONFIGURATION 1.7 Structure 1.7.1 Parts identification (1) 200 V class (a) MR-J4-200A(-RJ) or less Detailed Name/Application explanation Display Section 4.5 The 5-digit, 7-segment LED shows the servo status and the alarm number. Operation section Used to perform status display, diagnostic, alarm, and parameter setting operations. - Page 35 1. FUNCTIONS AND CONFIGURATION (b) MR-J4-350A(-RJ) Detailed Name/Application The broken line area is the same as explanation MR-J4-200A(-RJ) or less. Main circuit power supply connector (CNP1) Section 3.1 Section 3.3 Connect the input power supply. Section 1.6 Rating plate Servo motor power supply connector (CNP3) Connect the servo motor.
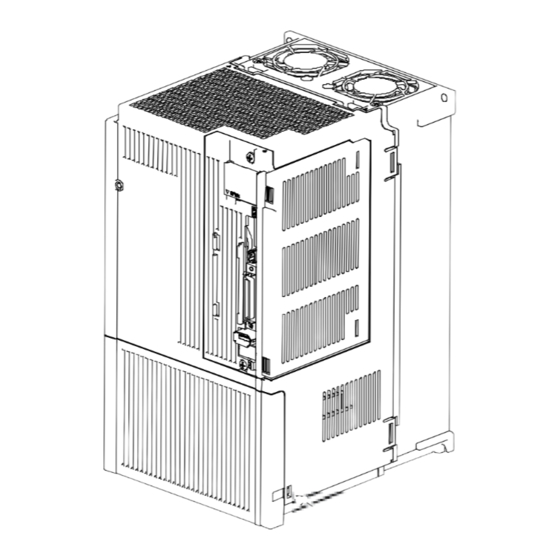
- Page 36 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-500A(-RJ) POINT The servo amplifier is shown with the front cover open. The front cover cannot be removed. Detailed Name/Application The broken line area is the same as explanation MR-J4-200A(-RJ) or less. Control circuit terminal block (TE2) Used to connect the control circuit power supply.
- Page 37 1. FUNCTIONS AND CONFIGURATION (d) MR-J4-700A(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. Detailed Name/Application The broken line area is the same as explanation MR-J4-200A(-RJ) or less. Power factor improving reactor terminal block (TE3) Used to connect the DC reactor.
- Page 38 1. FUNCTIONS AND CONFIGURATION (e) MR-J4-11KA(-RJ)/MR-J4-15KA(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. Detailed Name/Application The broken line area is the same as explanation MR-J4-200A(-RJ) or less. Power factor improving reactor terminal block (TE1- Used to connect a power factor improving DC reactor and a regenerative option.
- Page 39 1. FUNCTIONS AND CONFIGURATION (f) MR-J4-22KA(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. Detailed Name/Application The broken line area is the same as explanation MR-J4-200A(-RJ) or less. Power factor improving reactor terminal block (TE1- Used to connect a power factor improving DC reactor and a regenerative option.
- Page 40 1. FUNCTIONS AND CONFIGURATION (2) 400 V class (a) For MR-J4-200A4(-RJ) or less The diagram is for MR-J4-60A4-RJ. Detailed Name/Application explanation Display The 5-digit, seven-segment LED shows the servo status and the alarm number. Operation section Used to perform status display, diagnostic, alarm, and parameter setting operations.
- Page 41 1. FUNCTIONS AND CONFIGURATION Note 1. This is for MR-J4-_A4-RJ servo amplifier. MR-J4-_A4 servo amplifier does not have CN2L connector. 2. "External encoder" is a term for linear encoder used in the linear servo system and load-side encoder used in the fully closed loop system in this manual.
- Page 42 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-500A4(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. The broken line area is the same as Detailed Name/Application MR-J4-200A4(-RJ) or less. explanation Control circuit terminal block (TE2) Used to connect the control circuit power supply.
- Page 43 1. FUNCTIONS AND CONFIGURATION (d) MR-J4-700A4(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. The broken line area is the same as Detailed Name/Application MR-J4-200A4(-RJ) or less. explanation Power factor improving reactor terminal block (TE3) Used to connect the DC reactor.
- Page 44 1. FUNCTIONS AND CONFIGURATION (e) MR-J4-11KA4(-RJ)/MR-J4-15KA4(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. The broken line area is the same as Detailed Name/Application MR-J4-200A4(-RJ) or less. explanation Power factor improving reactor terminal block (TE1-2) Used to connect a power factor improving DC...
- Page 45 1. FUNCTIONS AND CONFIGURATION (f) MR-J4-22KA4(-RJ) POINT The servo amplifier is shown without the front cover. For removal of the front cover, refer to section 1.7.2. The broken line area is the same as Detailed Name/Application MR-J4-200A4(-RJ) or less. explanation Power factor improving reactor terminal block (TE1-2) Used to connect a power factor improving DC...
-
Page 46: Removal And Reinstallation Of The
1. FUNCTIONS AND CONFIGURATION 1.7.2 Removal and reinstallation of the front cover Before removing or installing the front cover, turn off the power and wait for 15 minutes or more until the charge lamp turns off. Then, confirm that the voltage CAUTION between P+ and N- is safe with a voltage tester and others. - Page 47 1. FUNCTIONS AND CONFIGURATION Reinstallation of the front cover Front cover setting tab 1) Insert the front cover setting tabs into the sockets of 2) Push down the cover, supporting at point A). the servo amplifier (2 places). Setting tab 3) Press the cover against the terminal box until the setting tabs click.
-
Page 48: Configuration Including Peripheral Equipment
1. FUNCTIONS AND CONFIGURATION 1.8 Configuration including peripheral equipment Connecting a servo motor of the wrong axis to U, V, W, or CN2 of the servo CAUTION amplifier may cause a malfunction. POINT Equipment other than the servo amplifier and servo motor are optional or recommended products. - Page 49 1. FUNCTIONS AND CONFIGURATION Note 1. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used. When not using the power factor improving DC reactor, short P3 and P4. 2.
- Page 50 1. FUNCTIONS AND CONFIGURATION (b) MR-J4-350A(-RJ) R S T (Note 2) Power supply Molded-case circuit breaker (MCCB) Personal computer MR Configurator2 (Note 3) Magnetic contactor (MC) (Note 1) Analog monitor Personal computer and other Line noise To safety relay or filter MR-J3-D05 safety (FR-BSF01)
- Page 51 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-500A(-RJ) R S T (Note 2) Power supply Molded-case circuit breaker (MCCB) Personal computer MR Configurator2 (Note 3) Magnetic contactor (MC) (Note 1) Analog monitor Personal computer and other Line noise filter To safety relay or (FR-BLF) MR-J3-D05 safety logic unit...
- Page 52 1. FUNCTIONS AND CONFIGURATION (d) MR-J4-700A(-RJ) (Note 2) Power R S T supply Molded-case Personal circuit breaker (MCCB) computer MR Configurator2 (Note 3) Magnetic contactor (MC) Analog monitor (Note 1) Personal computer and other To safety relay or Line noise MR-J3-D05 safety filter logic unit...
- Page 53 1. FUNCTIONS AND CONFIGURATION (e) MR-J4-11KA(-RJ)/MR-J4-15KA(-RJ) R S T Personal (Note 2) computer Power MR Configurator2 supply Molded-case circuit breaker (MCCB) Analog monitor (Note 3) Magnetic Personal computer and other contactor (MC) To safety relay or MR-J3-D05 safety (Note 1) logic unit Line noise filter...
- Page 54 1. FUNCTIONS AND CONFIGURATION (f) MR-J4-22KA(-RJ) Personal computer MR Configurator2 R S T (Note 2) Power supply Molded-case circuit breaker (MCCB) Analog monitor Personal computer and other (Note 3) Magnetic To safety relay or contactor MR-J3-D05 safety (MC) logic unit (Note 1) Junction terminal block Line noise...
- Page 55 1. FUNCTIONS AND CONFIGURATION (2) 400 V class (a) MR-J4-200A4(-RJ) or less The diagram is for MR-J4-60A4-RJ and MR-J4-100A4-RJ. R S T Personal (Note 2) computer Power supply MR Configurator2 Molded-case circuit breaker (MCCB) Analog monitor (Note 3) Magnetic contactor Personal computer and others (MC) To safety relay or...
- Page 56 1. FUNCTIONS AND CONFIGURATION (b) MR-J4-350A4(-RJ) R S T (Note 2) Power supply Personal Molded-case computer circuit breaker MR Configurator2 (MCCB) (Note 3) Magnetic contactor (MC) Analog monitor (Note 1) Personal computer and others To safety relay or MR-J3-D05 safety logic unit Line noise filter (FR-BSF01)
- Page 57 1. FUNCTIONS AND CONFIGURATION (c) MR-J4-500A4(-RJ) R S T (Note 2) Power supply Molded-case circuit breaker (MCCB) Personal computer MR Configurator2 (Note 3) Magnetic contactor (MC) (Note 1) Power factor Analog monitor improving DC reactor Personal computer and others (FR-HEL-H) To safety relay or Line noise filter MR-J3-D05 safety...
- Page 58 1. FUNCTIONS AND CONFIGURATION (d) MR-J4-700A4(-RJ) R S T (Note 2) Power supply Personal computer Molded-case MR Configurator2 circuit breaker (MCCB) (Note 3) Analog monitor Magnetic contactor Personal computer and others (MC) To safety relay or (Note 1) MR-J3-D05 safety logic unit Line noise filter (FR-BLF)
- Page 59 1. FUNCTIONS AND CONFIGURATION (e) MR-J4-11KA4(-RJ)/MR-J4-15KA4(-RJ) Personal computer R S T MR Configurator2 (Note 2) Power supply Molded-case circuit breaker (MCCB) Analog monitor Personal computer and others (Note 3) To safety relay or Magnetic MR-J3-D05 safety contactor logic unit (MC) (Note 1) Junction terminal block Line noise filter...
- Page 60 1. FUNCTIONS AND CONFIGURATION (f) MR-J4-22KA4(-RJ) Personal computer MR Configurator2 R S T (Note 2) Power supply Molded-case circuit breaker (MCCB) Analog monitor Personal computer and others To safety relay or (Note 3) MR-J3-D05 safety Magnetic logic unit contactor (MC) (Note 1) Junction terminal block Line noise filter...
- Page 61 1. FUNCTIONS AND CONFIGURATION MEMO 1 - 44...
-
Page 62: Installation
(heat method). Additionally, disinfect and protect wood from insects before packing products. POINT When pulling out CNP1, CNP2, and CNP3 connectors of MR-J4-10A(-RJ), MR- J4-20A(-RJ), MR-J4-40A(-RJ) and MR-J4-60A(-RJ), pull out CN3 and CN8 connectors beforehand. 2 - 1... -
Page 63: Installation Direction And Clearances
2. INSTALLATION 2.1 Installation direction and clearances The equipment must be installed in the specified direction. Otherwise, it may cause a malfunction. CAUTION Leave specified clearances between the servo amplifier and the cabinet walls or other equipment. Otherwise, it may cause a malfunction. (1) Installation clearances of the servo amplifier (a) Installation of one servo amplifier Cabinet... -
Page 64: Keep Out Foreign Materials
2. INSTALLATION (b) Installation of two or more servo amplifiers POINT Close mounting is possible depending on the capacity of the servo amplifier. Refer to section 1.3 for availability of close mounting. When mounting the servo amplifiers closely, do not install the servo amplifier whose depth is larger than that of the left side servo amplifier since CNP1, CNP2, and CNP3 connectors cannot be disconnected. -
Page 65: Encoder Cable Stress
2. INSTALLATION (3) When installing the cabinet in a place where toxic gas, dirt and dust exist, conduct an air purge (force clean air into the cabinet from outside to make the internal pressure higher than the external pressure) to prevent such materials from entering the cabinet. -
Page 66: Parts Having Service Lives
2. INSTALLATION 2.5 Parts having service lives Service lives of the following parts are listed below. However, the service life vary depending or operating methods and environment. If any fault is found in the parts, they must be replaced immediately regardless of their service lives. - Page 67 2. INSTALLATION MEMO 2 - 6...
-
Page 68: Signals And Wiring
3. SIGNALS AND WIRING 3. SIGNALS AND WIRING Any person who is involved in wiring should be fully competent to do the work. Before wiring, turn off the power and wait for 15 minutes or more until the charge lamp turns off. Then, confirm that the voltage between P+ and N- is safe with a voltage tester and others. -
Page 69: Input Power Supply Circuit
3. SIGNALS AND WIRING POINT When you use a linear servo motor, replace the following left words to the right words. Load to motor inertia ratio → Load to motor mass ratio Torque → Thrust (Servo motor) speed → (Linear servo motor) speed 3.1 Input power supply circuit Always connect a magnetic contactor between the power supply and the main circuit power supply (L1, L2, and L3) of the servo amplifier, in order to configure a... -
Page 70: Class
3. SIGNALS AND WIRING 3.1.1 200 V class (1) For 3-phase 200 V AC to 240 V AC power supply of MR-J4-10A(-RJ) to MR-J4-350A(-RJ) Malfunction EMG stop switch Servo amplifier Servo motor (Note 6) MCCB CNP1 (Note 10) 3-phase CNP3... - Page 71 3. SIGNALS AND WIRING (2) For 1-phase 200 V AC to 240 V AC power supply of MR-J4-10A(-RJ) to MR-J4-70A(-RJ) POINT Connect the 1-phase 200 V AC to 240 V AC power supply to L1 and L3. One of the connecting destinations is different from MR-J3 Series Servo Amplifier's.
- Page 72 3. SIGNALS AND WIRING (3) MR-J4-500A(-RJ) Malfunction EMG stop switch Servo amplifier Servo motor (Note 6) MCCB (Note 10) 3-phase (Note 5) 200 V AC to Motor 240 V AC (Note 9) (Note 1) (Note 10) (Note 3) Encoder Encoder cable (Note 2) (Note 7) Main circuit power supply...
- Page 73 3. SIGNALS AND WIRING (4) MR-J4-700A(-RJ) Malfunction EMG stop switch Servo amplifier Servo motor (Note 6) MCCB (Note 10) 3-phase (Note 5) Built-in 200 V AC to Motor regenerative 240 V AC resistor (Note 2) (Note 9) (Note 10) (Note 3) Encoder Encoder cable (Note 1)
- Page 74 3. SIGNALS AND WIRING (5) MR-J4-11KA(-RJ)/MR-J4-15KA(-RJ)/MR-J4-22KA(-RJ) Malfunction EMG stop switch (Note 13) Cooling fan power supply (Note 14) Servo amplifier External Servo motor (Note 6) dynamic brake MCCB (optional) 3-phase (Note 10) 200 V AC to Motor 240 V AC MCCB (Note 5) (Note 9)
-
Page 75: Class
3. SIGNALS AND WIRING 3.1.2 400 V class (1) MR-J4-60A4(-RJ) to MR-J4-350A4(-RJ) Malfunction Emergency stop switch (Note 11) Step-down Servo amplifier Servo motor transformer CNP1 (Note 10) (Note 6) MCCB CNP3 (Note 5) Motor 3-phase 380 V AC to 480 V AC (Note 9) (Note 1) CNP2... - Page 76 3. SIGNALS AND WIRING (2) MR-J4-500A4(-RJ)/MR-J4-700A4(-RJ) Malfunction Emergency stop switch (Note 11) Step-down transformer Servo amplifier Servo motor (Note 6) MCCB (Note 10) 3-phase (Note 5) Built-in 380 V AC to Motor regenerative 480 V AC resistor (Note 2) (Note 9) (Note 10) (Note 3) Encoder...
- Page 77 3. SIGNALS AND WIRING (3) MR-J4-11KA4(-RJ) to MR-J4-22KA4(-RJ) Malfunction (Note 13) Cooling fan Emergency stop switch (Note 11) power supply Step-down External transformer Servo amplifier Servo motor dynamic brake (Note 6) (optional) MCCB (Note 15) 3-phase (Note 10) 380 V AC to Motor 480 V AC MCCB...
-
Page 78: I/O Signal Connection Example
3. SIGNALS AND WIRING 3.2 I/O signal connection example 3.2.1 Position control mode (1) Sink I/O interface Servo amplifier (Note 4) 24 V DC (Note 7) (Note 4) Positioning module 24 V DC QD75D (Note 7) DOCOM (Note 2) DICOM Malfunction (Note 6) CLEARCOM... - Page 79 3. SIGNALS AND WIRING Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the servo amplifier to the protective earth (PE) of the cabinet. 2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will malfunction and will not output signals, disabling EM2 (Forced stop 2) and other protective circuits.
- Page 80 3. SIGNALS AND WIRING (2) Source I/O interface POINT For notes, refer to (1) in this section. Servo amplifier (Note 4, 14) 24 V DC (Note 7) (Note 4, 14) Positioning module 24 V DC QD75D (Note 7) DOCOM (Note 2) DICOM Malfunction (Note 6)
-
Page 81: Speed Control Mode
3. SIGNALS AND WIRING 3.2.2 Speed control mode (1) Sink I/O interface Servo amplifier (Note 7) (Note 4) 24 V DC DOCOM DOCOM (Note 2) 10 m or less Malfunction (Note 7) (Note 13) (Note 6) Main circuit power supply Zero speed Forced stop 2 (Note 3, 5) - Page 82 3. SIGNALS AND WIRING Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the servo amplifier to the protective earth (PE) of the cabinet. 2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will malfunction and will not output signals, disabling EM2 (Forced stop 2) and other protective circuits.
- Page 83 3. SIGNALS AND WIRING (2) Source I/O interface POINT For notes, refer to (1) in this section. Servo amplifier (Note 7) (Note 4, 14) 24 V DC DOCOM DOCOM (Note 2) 10 m or less Malfunction (Note 7) (Note 13) (Note 6) Main circuit power supply Zero speed...
-
Page 84: Torque Control Mode
3. SIGNALS AND WIRING 3.2.3 Torque control mode POINT EM2 has the same function as EM1 in the torque control mode. (1) For sink I/O interface Servo amplifier (Note 6) (Note 4) 24 V DC DOCOM DOCOM (Note 2) 10 m or less Malfunction (Note 6) (Note 11) - Page 85 3. SIGNALS AND WIRING Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the servo amplifier to the protective earth (PE) of the cabinet. 2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will malfunction and will not output signals, disabling EM2 (Forced stop 2) and other protective circuits.
- Page 86 3. SIGNALS AND WIRING (2) For source I/O interface POINT For notes, refer to (1) in this section. Servo amplifier (Note 6) (Note 4, 12) 24 V DC DOCOM DOCOM (Note 2) 10 m or less Malfunction (Note 11) (Note 6) (Note 5) Main circuit power supply Zero speed...
-
Page 87: Explanation Of Power Supply System
(application) Supply the following power to L1, L2, and L3. For 1-phase 200 V AC to 240 V AC, connect the power supply to L1 and L3. Leave L2 open. Servo amplifier MR-J4-10A(-RJ) to MR-J4-100A(-RJ) to MR-J4-60A4(-RJ) to MR-J4-70A(-RJ) MR-J4-22KA(-RJ) -
Page 88: Power-On Sequence
3. SIGNALS AND WIRING Connection target Symbol Description (application) Connect the servo amplifier power output (U, V, and W) to the servo motor power input (U, V, Servo motor U/V/W and W) directly. Do not let a magnetic contactor, etc. intervene. Otherwise, it may cause a power output malfunction. -
Page 89: Wiring Cnp1, Cnp2, And Cnp3
For the wire sizes used for wiring, refer to section 11.9. MR-J4-500A(-RJ) or more do not have these connectors. Use the servo amplifier power connector for wiring CNP1, CNP2, and CNP3. (1) Connector (a) MR-J4-10A(-RJ) to MR-J4-100A(-RJ) Servo amplifier CNP1 CNP2 CNP3 Table 3.1 Connector and applicable wire... - Page 90 3. SIGNALS AND WIRING (c) MR-J4-60A4(-RJ) to MR-J4-350A4(-RJ) Servo amplifier (Note) CNP1 CNP2 CNP3 Note. A pin for preventing improper connection is inserted to N- of CNP1 connector. Table 3.3 Connector and applicable wire Applicable wire Stripped Manufa Connector Receptacle assembly Open tool length [mm] cturer...
- Page 91 You can also use a ferrule to connect with the connectors. The following shows references to select ferrules according to wire sizes. Ferrule model (Phoenix Contact) Crimp terminal Servo amplifier Wire size (Phoenix Contact) For one For two MR-J4-10A(-RJ) AWG16 AI1.5-10BK AI-TWIN2×1.5-10BK AWG14 AI2.5-10BU MR-J4-100A(-RJ) AWG16 AI1.5-10BK AI-TWIN2×1.5-10BK...
-
Page 92: Connectors And Pin Assignment
3. SIGNALS AND WIRING 3.4 Connectors and pin assignment POINT The pin assignment of the connectors are as viewed from the cable connector wiring section. For the STO I/O signal connector (CN8), refer to chapter 13. For the CN1 connector, securely connect the external conductive portion of the shielded cable to the ground plate and fix it to the connector shell. - Page 93 3. SIGNALS AND WIRING The servo amplifier front view shown is that of the MR-J4-20A-RJ or less. Refer to chapter 9 DIMENSIONS for the appearances and connector layouts of the other servo amplifiers. CN5 (USB connector) refer to section 11.7. CN3 (RS-422 connector) refer to chapter 14.
- Page 94 3. SIGNALS AND WIRING (Note 2) I/O signals in control modes (Note 1) Pin No. Related parameter P15R P15R P15R P15R P15R P15R -/VC VC/VLA VLA/- PP/- -/PP PG/- -/PG OPC/- -/OPC Pr. PD03/Pr. PD04 -/SP2 SP2/SP2 SP2/- Pr. PD05/Pr. PD06 PC/ST1 ST1/RS2 RS2/PC...
-
Page 95: Signal (Device) Explanations
3. SIGNALS AND WIRING 3.5 Signal (device) explanations For the I/O interfaces (symbols in I/O division column in the table), refer to section 3.9.2. In the control mode field of the table P: Position control mode, S: Speed control mode, T: Torque control mode : devices used with initial setting status, : devices used by setting [Pr. - Page 96 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division Forward rotation CN1-43 To start operation, turn on LSP and LSN. Turn it off to bring the motor to a DI-1 stroke end sudden stop and make it servo-locked. Setting [Pr.
- Page 97 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division Forward rotation CN1-18 This is used to select a servo motor torque generation directions. DI-1 selection The following shows the torque generation directions. (Note) Input device Torque generation direction Torque is not generated.
- Page 98 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division Proportion control CN1-17 Turn PC on to switch the speed amplifier from the proportional integral type DI-1 to the proportional type. If the servo motor at a stop is rotated even one pulse due to any external factor, it generates torque to compensate for a position shift.
- Page 99 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division Control switching CN1-45 «Position/speed control change mode» DI-1 Refer to Function This is used to select the control mode in the position/speed control switching mode. application (Note) Control...
- Page 100 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division ABS transfer ABSM CN1-17 This is an ABS transfer mode request device. DI-1 mode When "_ _ _ 1" is set in [Pr. PA03] and absolute position detection system by DIO is selected, CN1-17 pin will become ABSM.
- Page 101 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division Zero speed CN1-23 ZSP turns on when the servo motor speed is zero speed (50r/min) or less. DO-1 detection Zero speed can be changed with [Pr. PC17]. OFF level Forward 70 r/min...
- Page 102 3. SIGNALS AND WIRING Control Connector Device Symbol Function and application mode pin No. division During tough MTTR MTTR turns on when the instantaneous power failure tough drive operates DO-1 drive while the tough drive function selection is enabled with [Pr. PA20]. During fully CLDS CLDS turns on during fully closed loop control.
- Page 103 3. SIGNALS AND WIRING (3) Output signal Control Connector Device Symbol Function and application mode pin No. division Encoder A- CN1-4 The encoder output pulses set in [Pr. PA15] are outputted in the differential DO-2 phase pulse line driver type. CN1-5 (differential line In CCW rotation of the servo motor, the encoder B-phase pulse lags the...
-
Page 104: Detailed Explanation Of Signals
3. SIGNALS AND WIRING 3.6 Detailed explanation of signals 3.6.1 Position control mode POINT Adjust the logic of a positioning module and command pulse as follows. Q series/L series positioning module Command pulse logic setting MR-J4-_A_(-RJ) servo Signal type Q series/L series positioning amplifier module Pr. - Page 105 3. SIGNALS AND WIRING The following section explains about the case where the negative logic and the forward/reverse rotation pulse trains are set to "_ _ 1 0" in [Pr. PA13]. (ON) (ON) (ON) (OFF) (OFF) (OFF) Forward rotation pulse train (transistor) Reverse rotation pulse train (OFF)
- Page 106 3. SIGNALS AND WIRING (2) INP (In-position) INP turns on when the number of droop pulses in the deviation counter falls within the preset in-position range ([Pr. PA10]). INP may turn on continuously during a low-speed operation with a large value set as the in-position range.
- Page 107 3. SIGNALS AND WIRING (5) Torque limit If the torque limit is canceled during servo-lock, the servo motor may suddenly CAUTION rotate according to position deviation in respect to the command position. (a) Torque limit and torque By setting [Pr. PA11 Forward rotation torque limit] or [Pr. PA12 Reverse rotation torque limit], torque is always limited to the maximum value during operation.
- Page 108 3. SIGNALS AND WIRING (Note) Input device Enabled torque limit value Limit value status CCW power running/CW CW power running/CCW regeneration regeneration Pr. PA11 Pr .PA12 Pr. PA11 > Pr. PA11 Pr. PA12 Pr. PA12 Pr. PA11 < Pr. PA12 Pr.
-
Page 109: Speed Control Mode
3. SIGNALS AND WIRING 3.6.2 Speed control mode (1) Speed setting (a) Speed command and speed The servo motor is run at the speeds set in the parameters or at the speed set in the applied voltage of VC (Analog speed command). A relation between VC (Analog speed command) applied voltage and the servo motor speed is as follows. - Page 110 3. SIGNALS AND WIRING (b) SP1 (Speed selection 1), SP2 (Speed selection 2), and speed command value Select any of the speed settings by the internal speed commands 1 to 3 and by VC (Analog speed command) using SP1 (Speed selection 1) and SP2 (Speed selection 2) as follows. (Note) Input device Speed command value VC (Analog speed command)
-
Page 111: Torque Control Mode
3. SIGNALS AND WIRING 3.6.3 Torque control mode (1) Torque limit (a) Torque command and torque The following shows a relation between the applied voltage of TC (Analog torque command) and the torque by the servo motor. The maximum torque is generated at ±8 V. The speed at ±8 V can be changed with [Pr. PC13]. CCW direction Forward rotation Maximum torque... - Page 112 3. SIGNALS AND WIRING (b) Analog torque command offset Using [Pr. PC38], the offset voltage of -9999 mV to 9999 mV can be added to the TC applied voltage as follows. Maximum torque Torque [Pr. PC38] offset range -9999 mV to 9999 mV 8 (-8) TC applied voltage [V] (2) Torque limit...
- Page 113 3. SIGNALS AND WIRING Normally, connect as follows. Servo amplifier (Note) 24 V DC DICOM P15R 2 kΩ 2 kΩ Japan resistor RRS10 or equivalent Note. This diagram shows sink I/O interface. For source I/O interface, refer to section 3.9.3. (b) Speed limit value selection Select any of the speed settings by the internal speed limits 1 to 7 and by VLA (Analog speed limit) using SP1 (Speed selection 1), SP2 (Speed selection 2), and SP3 (Speed selection 3) as follows.
-
Page 114: Position/Speed Control Switching Mode
3. SIGNALS AND WIRING 3.6.4 Position/speed control switching mode Set " _ _ _ 1" in [Pr. PA01] to switch to the position/speed control switching mode. This function is not available in the absolute position detection system. (1) LOP (control switching) Use LOP (Control switching) to switch between the position control mode and the speed control mode with an external contact. - Page 115 3. SIGNALS AND WIRING (3) Speed setting in speed control mode (a) Speed command and speed The servo motor is run at the speeds set in the parameters or at the speed set in the applied voltage of VC (Analog speed command). The relation between an applied voltage of VC (Analog speed command) and servo motor speed, and the rotation direction with turning on ST1/ST2 are the same as section 3.6.2 (1) (a).
-
Page 116: Speed/Torque Control Switching Mode
3. SIGNALS AND WIRING (c) SA (Speed reached) As in section 3.6.2 (2) 3.6.5 Speed/torque control switching mode Set " _ _ _ 3" in [Pr. PA01] to switch to the speed/torque control switching mode. (1) LOP (control switching) Use LOP (Control switching) to switch between the speed control mode and the torque control mode with an external contact. - Page 117 3. SIGNALS AND WIRING Normally, connect as follows. Servo amplifier (Note) 24 V DC DICOM P15R 2 kΩ 2 kΩ Japan resistor RRS10 or equivalent Note. This diagram shows sink I/O interface. For source I/O interface, refer to section 3.9.3. (b) Speed limit value selection Select any of the speed settings by the internal speed limit 1 and by VLA (Analog speed limit) using SP1 (Speed selection 1) as follows.
-
Page 118: Torque/Position Control Switching Mode
3. SIGNALS AND WIRING 3.6.6 Torque/position control switching mode Set " _ _ _ 5" in [Pr. PA01] to switch to the torque/position control switching mode. (1) LOP (control switching) Use LOP (Control switching) to switch between the torque control mode and the position control mode with an external contact. -
Page 119: Forced Stop Deceleration Function
3. SIGNALS AND WIRING 3.7 Forced stop deceleration function POINT When alarms not related to the forced stop function occur, control of motor deceleration can not be guaranteed. (Refer to chapter 8.) In the torque control mode, the forced stop deceleration function is not available. 3.7.1 Forced stop deceleration function (SS1) When EM2 is turned off, dynamic brake will start to stop the servo motor after forced stop deceleration. - Page 120 3. SIGNALS AND WIRING (2) Timing chart POINT When LSP/LSN is turned on during a forced stop deceleration, the motor will stop depending on the setting of [Pr. PD30] as follows. [Pr. PD30] Stop system _ _ _ 0 Switching to sudden stop _ _ _ 1 Continuing forced stop deceleration When EM2 (Forced stop 2) turns off, the motor will decelerate according to [Pr.
-
Page 121: Base Circuit Shut-Off Delay Time Function
3. SIGNALS AND WIRING 3.7.2 Base circuit shut-off delay time function The base circuit shut-off delay time function is used to prevent vertical axis from dropping at a forced stop (EM2 goes off) or alarm occurrence due to delay time of the electromagnetic brake. Use [Pr. PC16] to set the delay time between completion of EM2 (Forced stop 2) or activation of MBR (Electromagnetic brake interlock) due to an alarm occurrence, and shut-off of the base circuit. -
Page 122: Vertical Axis Freefall Prevention Function
3. SIGNALS AND WIRING 3.7.3 Vertical axis freefall prevention function The vertical axis freefall prevention function avoids machine damage by pulling up the shaft slightly like the following case. When the servo motor is used for operating vertical axis, the servo motor electromagnetic brake and the base circuit shut-off delay time function avoid dropping axis at forced stop. -
Page 123: Alarm Occurrence Timing Chart
3. SIGNALS AND WIRING 3.8 Alarm occurrence timing chart When an alarm has occurred, remove its cause, make sure that the operation CAUTION signal is not being input, ensure safety, and reset the alarm before restarting operation. POINT In the torque control mode, the forced stop deceleration function is not available. To deactivate an alarm, cycle the control circuit power, push the "SET"... -
Page 124: When You Do Not Use The Forced Stop Deceleration Function
3. SIGNALS AND WIRING (2) When the forced stop deceleration function is not enabled Alarm occurrence Braking by the dynamic brake Dynamic brake + Braking by the electromagnetic brake Servo motor speed 0 r/min Base circuit (Energy supply to the servo motor) Servo amplifier No alarm Alarm No. -
Page 125: Interfaces
3. SIGNALS AND WIRING 3.9 Interfaces 3.9.1 Internal connection diagram POINT Refer to section 13.3.1 for the CN8 connector. Servo amplifier (Note 1) (Note 5) 24 V DC (Note 1) Approx. DOCOM 6.2 kΩ SON SON SON DOCOM SP2 SP2 16 INP SA PC ST1 RS2 17 TL ST2 RS1 18... -
Page 126: Detailed Explanation Of Interfaces
3. SIGNALS AND WIRING Note 1. P: Position control mode, S: Speed control mode, T: Torque control mode 2. This is for the differential line driver pulse train input. For the open-collector pulse train input, connect as follows. DOCOM 24 V DC DICOM DOCOM 3. - Page 127 3. SIGNALS AND WIRING (3) Pulse train input interface DI-2 Give a pulse train signal in the differential line driver type or open-collector type. (a) Differential line driver type 1) Interface Servo amplifier Max. input pulse frequency 4 Mpulses/s (Note 2) 10 m or less PP (NP) Approximalely...
- Page 128 3. SIGNALS AND WIRING 2) Input pulse condition tLH = tHL < 0.2 s tc > 2 s tF > 3 s (4) Encoder output pulse DO-2 (a) Open-collector type Interface Maximum sink current: 35 mA 5 V DC to 24 V DC Servo amplifier Servo amplifier Photocoupler...
- Page 129 3. SIGNALS AND WIRING 2) Output pulse Servo motor CCW rotation Time cycle (T) is determined by the settings of [Pr. PA15] and [Pr. PC19]. 400 s or more (5) Analog input Input impedance 10 kΩ to 12 kΩ Servo amplifier +15 V DC P15R Upper limit setting...
-
Page 130: Source I/O Interfaces
3. SIGNALS AND WIRING 3.9.3 Source I/O interfaces In this servo amplifier, source type I/O interfaces can be used. (1) Digital input interface DI-1 This is an input circuit whose photocoupler anode side is the input terminal. Transmit signals using source (open-collector) type transistor output, relay switch, etc. -
Page 131: Servo Motor With An Electromagnetic Brake
3. SIGNALS AND WIRING 3.10 Servo motor with an electromagnetic brake 3.10.1 Safety precautions Configure an electromagnetic brake circuit so that it is activated also by an external EMG stop switch. Contacts must be opened when ALM (Malfunction) Contacts must be opened with the or MBR (Electromagnetic brake interlock) turns off. -
Page 132: Timing Chart
3. SIGNALS AND WIRING (2) Setting (a) Enable MBR (Electromagnetic brake interlock) with [Pr. PD23] to [Pr. PD26] and [Pr. PD28]. (b) In [Pr. PC16 Electromagnetic brake sequence output], set a delay time (Tb) from MBR (Electromagnetic brake interlock) off to base circuit shut-off at a servo-off as in the timing chart in section 3.10.2 (1). - Page 133 3. SIGNALS AND WIRING (b) Forced stop 2 on/off POINT In the torque control mode, the forced stop deceleration function is not available. (Note 2) Model speed command 0 and equal to or less than zero speed Servo motor speed 0 r/min Base circuit (Energy supply to...
- Page 134 3. SIGNALS AND WIRING (e) Main circuit power supply off during control circuit power supply on POINT In the torque control mode, the forced stop deceleration function is not available. Forced stop deceleration Dynamic brake Dynamic brake The time until a voltage Servo motor speed drop is detected.
- Page 135 3. SIGNALS AND WIRING (c) Alarm occurrence The operation status during an alarm is the same as section 3.8. (d) Both main and control circuit power supplies off It is the same as (1) (d) of this section. (e) Main circuit power supply off during control circuit power supply on Dynamic brake Dynamic brake + Electromagnetic brake...
-
Page 136: Grounding
3. SIGNALS AND WIRING 3.11 Grounding Ground the servo amplifier and servo motor securely. WARNING To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the servo amplifier to the protective earth (PE) of the cabinet. The servo amplifier switches the power transistor on-off to supply power to the servo motor. - Page 137 3. SIGNALS AND WIRING MEMO 3 - 70...
-
Page 138: Startup
4. STARTUP 4. STARTUP Do not operate the switches with wet hands. Otherwise, it may cause an electric WARNING shock. Before starting operation, check the parameters. Improper settings may cause some machines to operate unexpectedly. The servo amplifier heat sink, regenerative resistor, servo motor, etc. may be hot while power is on or for some time after power-off. -
Page 139: Switching Power On For The First Time
4. STARTUP 4.1 Switching power on for the first time When switching power on for the first time, follow this section to make a startup. 4.1.1 Startup procedure Check whether the servo amplifier and servo motor are wired correctly using Wiring check visual inspection, DO forced output function (section 4.5.8), etc. -
Page 140: Wiring Check
4. STARTUP 4.1.2 Wiring check (1) Power supply system wiring Before switching on the main circuit and control circuit power supplies, check the following items. (a) Power supply system wiring The power supplied to the power input terminals (L1, L2, L3, L11, and L21) of the servo amplifier should satisfy the defined specifications. - Page 141 4. STARTUP (c) When option and auxiliary equipment are used 1) 200 V class a) When you use a regenerative option for 5 kW or less servo amplifiers The lead wire between P+ terminal and D terminal should not be connected. The regenerative option should be connected to P+ terminal and C terminal.
- Page 142 4. STARTUP c) When you use a brake unit and power regeneration converter for 5 kW or more servo amplifiers For 5 kW or 7 kW servo amplifiers, the lead wire of built-in regenerative resistor connected to P+ terminal and C terminal should not be connected. Brake unit, power regeneration converter should be connected to P+ terminal and N- terminal.
-
Page 143: Surrounding Environment
4. STARTUP 4.1.3 Surrounding environment (1) Cable routing (a) The wiring cables should not be stressed. (b) The encoder cable should not be used in excess of its bending life. (Refer to section 10.4.) (c) The connector of the servo motor should not be stressed. (2) Environment Signal cables and power cables are not shorted by wire offcuts, metallic dust or the like. -
Page 144: Stop
4. STARTUP 4.2.2 Stop If any of the following situations occurs, the servo amplifier suspends the running of the servo motor and brings it to a stop. Refer to section 3.10 for the servo motor with an electromagnetic brake. Operation/command Stopping condition Switch of SON (Servo-on). -
Page 145: Test Operation
4. STARTUP 4.2.3 Test operation Before starting actual operation, perform test operation to make sure that the machine operates normally. Refer to section 4.2.1 for the power on and off methods of the servo amplifier. Test operation of the servo motor In this step, confirm that the servo amplifier and servo motor operate alone in JOG operation of test normally. -
Page 146: Parameter Setting
4. STARTUP 4.2.4 Parameter setting POINT The following encoder cables are of four-wire type. When using any of these encoder cables, set [Pr. PC22] to "1 _ _ _" to select the four-wire type. Incorrect setting will result in [AL. 16 Encoder initial communication error 1]. MR-EKCBL30M-L MR-EKCBL30M-H MR-EKCBL40M-H... - Page 147 4. STARTUP Start-up sequence Fault Investigation Possible cause Reference Switch on SON Alarm occurs. Refer to chapter 8 and remove cause. Chapter 8 (Servo-on). (Note) Servo motor shaft is 1. Check the display to see if the 1. SON (Servo-on) is not input. Section not servo-locked.
- Page 148 4. STARTUP (2) How to find the cause of position shift Controller Servo amplifier Machine (a) Output pulse Servo motor counter Electronic gear [Pr.PA05], [Pr.PA06], (d) Machine stop position M [Pr.PA07], [Pr.PA21] (b) Cumulative command pulses Cause B Cause A SON (Servo-on) input LSP/LSN (Stroke end) input Encoder...
-
Page 149: Startup In Speed Control Mode
4. STARTUP 2) When P • ≠ C During operation, SON (Servo-on), LSP (Forward rotation stroke end), or LSN (Reverse rotation stroke end) was switched off; or CR (Clear) or RES (Reset) was switched on. (Cause C) 3) When C • Δℓ ≠ M Mechanical slip occurred between the servo motor and machine. -
Page 150: Test Operation
4. STARTUP 4.3.3 Test operation Before starting actual operation, perform test operation to make sure that the machine operates normally. Refer to section 4.3.1 for the power on and off methods of the servo amplifier. Test operation of the servo motor In this step, confirm that the servo amplifier and servo motor operate alone in JOG operation of test normally. -
Page 151: Parameter Setting
4. STARTUP 4.3.4 Parameter setting POINT The following encoder cables are of four-wire type. When using any of these encoder cables, set [Pr. PC22] to "1 _ _ _" to select the four-wire type. Incorrect setting will result in [AL. 16 Encoder initial communication error 1]. MR-EKCBL30M-L MR-EKCBL30M-H MR-EKCBL40M-H... - Page 152 4. STARTUP Start-up sequence Fault Investigation Possible cause Reference Switch on SON Alarm occurs. Refer to chapter 8 and remove cause. Chapter 8 (Servo-on). (Note) Servo motor shaft is 1. Check the display to see if the 1. SON (Servo-on) is not input. Section not servo-locked.
-
Page 153: Startup In Torque Control Mode
4. STARTUP 4.4 Startup in torque control mode Make a startup in accordance with section 4.1. This section provides the methods specific to the torque control mode. 4.4.1 Power on and off procedures (1) Power-on Switch power on in the following procedure. Always follow this procedure at power-on. 1) Switch off SON (Servo-on). -
Page 154: Test Operation
4. STARTUP 4.4.3 Test operation Before starting actual operation, perform test operation to make sure that the machine operates normally. Refer to section 4.4.1 for the power on and off methods of the servo amplifier. Test operation of the servo motor In this step, confirm that the servo amplifier and servo motor operate alone in JOG operation of test normally. -
Page 155: Parameter Setting
4. STARTUP 4.4.4 Parameter setting POINT The following encoder cables are of four-wire type. When using any of these encoder cables, set [Pr. PC22] to "1 _ _ _" to select the four-wire type. Incorrect setting will result in [AL. 16 Encoder initial communication error 1]. MR-EKCBL30M-L MR-EKCBL30M-H MR-EKCBL40M-H... -
Page 156: Trouble At Start-Up
4. STARTUP 4.4.6 Trouble at start-up Never adjust or change the parameter values extremely as it will make unstable CAUTION movement. POINT Using the optional MR Configurator2, you can refer to reason for rotation failure, etc. The following faults may occur at start-up. If any of such faults occurs, take the corresponding action. Start-up sequence Fault Investigation... -
Page 157: Display And Operation Sections
4. STARTUP 4.5 Display and operation sections 4.5.1 Summary The MR-J4-_A_(-RJ) servo amplifier has the display section (5-digit, 7-segment LED) and operation section (4 pushbuttons) for servo amplifier status display, alarm display, parameter setting, etc. Also, press the "MODE" and "SET" buttons at the same time for 3 s or more to switch to the one-touch tuning mode. The operation section and display data are described below. -
Page 158: Display Flowchart
4. STARTUP 4.5.2 Display flowchart Press the "MODE" button once to shift to the next display mode. Refer to section 4.5.3 and later for the description of the corresponding display mode. To refer to and set the gain/filter parameters, extension setting parameters and I/O setting parameters, enable them with [Pr. -
Page 159: Status Display Mode
4. STARTUP 4.5.3 Status display mode The servo status during operation is shown on the 5-digit, 7-segment LED display. Press the "UP" or "DOWN" button to change display data as desired. When the required data is selected, the corresponding symbol is displayed. Press the "SET" button to display that data. At only power-on, however, data appears after the symbol of the status display selected in [Pr. - Page 160 4. STARTUP (b) Fully closed loop control mode Load-side encoder information 2 (Note) Cumulative feedback pulses Unit total power consumption 2 (increment of 100 kWh) Load-side encoder cumulative feedback pulses Load-side encoder droop pulses Load-side encoder information 1 (1 pulse unit) Load-side encoder information 1 (100 pulses unit) Load-side encoder information 2...
- Page 161 4. STARTUP (c) Linear servo motor control mode/DD motor control mode Electrical angle high (Note) Cumulative feedback pulses Unit total power consumption 2 (increment of 100 kWh) Z-phase counter low Z-phase counter high Electrical angle low Electrical angle high Cumulative feedback pulses Note.
- Page 162 4. STARTUP (2) Display examples The following table shows the display examples. Displayed data Item State Servo amplifier display Forward rotation at 2500 r/min Servo motor speed Reverse rotation at 3000 r/min Reverse rotation is indicated by "- ". Load to motor inertia ratio 7.00 times 11252 rev ABS counter -12566 rev...
- Page 163 4. STARTUP (3) Status display list The following table lists the servo statuses that may be shown. Refer to appendix 8 (3) for the measurement point. Status display Symbol Unit Description Feedback pulses from the servo motor encoder are counted and displayed. The values in excess of ±99999 can be counted.
- Page 164 4. STARTUP Status display Symbol Unit Description The estimated ratio of the load inertia moment to the servo motor shaft inertia Load to motor inertia ratio Multiplier moment is displayed. Bus voltage The voltage of main circuit converter (between P+ and N-) is displayed. Encoder inside temperature °C Inside temperature of encoder etected by the encoder is displayed.
- Page 165 4. STARTUP (4) Changing the status display screen The status display item of the servo amplifier display shown at power-on can be changed by changing [Pr. PC36] settings. The item displayed in the initial status changes with the control mode as follows. Control mode Status display Position...
-
Page 166: Diagnostic Mode
4. STARTUP 4.5.4 Diagnostic mode Name Display Description Not ready Indicates that the servo amplifier is being initialized or an alarm has occurred. Sequence Ready Indicates that the servo was switched on after completion of initialization and the servo amplifier is ready to operate. Drive recorder enabled When an alarm occurs in the status, the drive recorder will operate and write the status of... - Page 167 4. STARTUP Name Display Description Indicates the system number of the software. Software version - Upper If offset voltages in the analog circuits inside and outside the servo amplifier cause the servo motor to rotate slowly at VC (Analog speed command) or VLA (Analog speed limit) of 0 V, this function automatically makes zero- adjustment of offset voltages.
-
Page 168: Alarm Mode
4. STARTUP 4.5.5 Alarm mode The current alarm, past alarm history and parameter error are displayed. The lower 2 digits on the display indicate the alarm number that has occurred or the parameter number in error. Name Display Description Indicates no occurrence of an alarm. Current alarm Indicates the occurrence of [AL. -
Page 169: Parameter Mode
4. STARTUP Functions at occurrence of an alarm (1) Any mode screen displays the current alarm. (2) Even during alarm occurrence, the other screen can be viewed by pressing the button in the operation area. At this time, the decimal point in the fourth digit remains flickering. (3) For any alarm, remove its cause and clear it in any of the following methods. - Page 170 4. STARTUP (2) Operation example (a) Parameters of 5 or less digits The following example shows the operation procedure performed after power-on to change the control mode to the speed control mode with [Pr. PA01 Operation mode]. Press "MODE" to switch to the basic setting parameter screen.
-
Page 171: External I/O Signal Display
4. STARTUP 4.5.7 External I/O signal display POINT The I/O signal settings can be changed using the I/O setting parameters [Pr. PD03] to [Pr. PD28]. The on/off states of the digital I/O signals connected to the servo amplifier can be confirmed. (1) Operation Call the display screen shown after power-on. - Page 172 4. STARTUP (a) Control modes and I/O signals Signal (Note 2) Symbols of I/O signals in control modes Connector Pin No. input/output Related parameter (Note 1) I/O Pr. PD03/Pr. PD04 -/SP2 SP2/SP2 SP2/- Pr. PD05/Pr. PD06 PC/ST1 ST1/RS2 RS2/PC Pr. PD07/Pr. PD08 TL/ST2 ST2/RS1 RS1/TL...
- Page 173 4. STARTUP (3) Display data at initial values (a) Position control mode CR (CN1-41) PC (CN1-17) RES (CN1-19) TL (CN1-18) SON (CN1-15) LOP (CN1-45) LSN (CN1-44) EM2 (CN1-42) LSP (CN1-43) Input signal Light on: on Output signals Light off: off OP (CN1-33) RD (CN1-49) ALM (CN1-48)
-
Page 174: Output Signal (Do) Forced Output
4. STARTUP 4.5.8 Output signal (DO) forced output POINT When the servo system is used in a vertical lift application, turning on MBR (Electromagnetic brake interlock) by the DO forced output after assigning it to connector CN1 will release the electromagnetic brake, causing a drop. Take drop preventive measures on the machine side. -
Page 175: Test Operation Mode
4. STARTUP 4.5.9 Test operation mode The test operation mode is designed for checking servo operation. Do not use it CAUTION for actual operation. If the servo motor operates unexpectedly, use EM2 (Forced stop 2) to stop it. POINT The test operation mode cannot be used in the absolute position detection system by DIO ([Pr. - Page 176 4. STARTUP (2) JOG operation POINT When performing JOG operation, turn on EM2, LSP and LSN. LSP and LSN can be set to automatic on by setting [Pr. PD01] to " _ C _ _ ". JOG operation can be performed when there is no command from the controller. (a) Operation The servo motor rotates while holding down the "UP"...
- Page 177 4. STARTUP (3) Positioning operation POINT MR Configurator2 is required to perform positioning operation. Turn on EM2 (forced stop 2) when performing positioning operation. Positioning operation can be performed when there is no command from a controller. (a) Operation a) Motor speed [r/min] Enter the servo motor speed into the "Motor speed"...
- Page 178 4. STARTUP f) Travel distance unit selection Select with the option buttons whether the travel distance set in c) is in the command pulse unit or in the encoder pulse unit. When the command input pulse unit is selected, the value, which is the set travel distance multiplied by the electronic gear, will be the command value.
- Page 179 4. STARTUP (4) Motor-less operation Without connecting the servo motor, output signals or status display can be provided in response to the input device as if the servo motor is actually running. This operation can be used to check the sequence of a controller or the like.
-
Page 180: Parameters
5. PARAMETERS 5. PARAMETERS Never make a drastic adjustment or change to the parameter values as doing so will make the operation unstable. CAUTION If fixed values are written in the digits of a parameter, do not change these values. Do not change parameters for manufacturer setting. - Page 181 5. PARAMETERS 5.1.1 Basic setting parameters ([Pr. PA_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PA01 *STY Operation mode 1000h PA02 *REG Regenerative option 0000h PA03 *ABS Absolute position detection system 0000h PA04 *AOP1 Function selection A-1 2000h PA05 *FBP...
-
Page 182: Gain/Filter Setting Parameters ([Pr. Pb_ _ ])
5. PARAMETERS 5.1.2 Gain/filter setting parameters ([Pr. PB_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PB01 FILT Adaptive tuning mode (adaptive filter II) 0000h PB02 VRFT Vibration suppression control tuning mode (advanced 0000h vibration suppression control II) PB03 Position command acceleration/deceleration time constant [ms]... - Page 183 5. PARAMETERS Operation Control mode mode Initial Symbol Name Unit value PB37 For manufacturer setting 1600 PB38 0.00 PB39 0.00 PB40 0.00 PB41 0000h PB42 0000h PB43 0000h PB44 0.00 PB45 CNHF Command notch filter 0000h PB46 Machine resonance suppression filter 3 4500 [Hz] PB47...
- Page 184 5. PARAMETERS 5.1.3 Extension setting parameters ([Pr. PC_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PC01 Acceleration time constant [ms] PC02 Deceleration time constant [ms] PC03 S-pattern acceleration/deceleration time constant [ms] PC04 Torque command time constant/thrust command time [ms] constant PC05...
- Page 185 5. PARAMETERS Operation Control mode mode Initial Symbol Name Unit value PC38 Analog torque command offset [mV] Analog torque limit offset PC39 Analog monitor 1 offset [mV] PC40 Analog monitor 2 offset [mV] PC41 For manufacturer setting PC42 PC43 Error excessive alarm detection level [rev]/[mm] PC44 *COP9...
- Page 186 5. PARAMETERS 5.1.4 I/O setting parameters ([Pr. PD_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PD01 *DIA1 Input signal automatic on selection 1 0000h PD02 For manufacturer setting 0000h PD03 *DI1L Input device selection 1L 0202h PD04 *DI1H Input device selection 1H...
- Page 187 5. PARAMETERS 5.1.5 Extension setting 2 parameters ([Pr. PE_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PE01 *FCT1 Fully closed loop function selection 1 0000h PE02 For manufacturer setting 0000h PE03 *FCT2 Fully closed loop function selection 2 0003h PE04 *FBN...
- Page 188 5. PARAMETERS Operation Control mode mode Initial Symbol Name Unit value PE42 For manufacturer setting PE43 PE44 0000h PE45 0000h PE46 0000h PE47 0000h PE48 0000h PE49 0000h PE50 0000h PE51 0000h PE52 0000h PE53 0000h PE54 0000h PE55 0000h PE56 0000h PE57...
- Page 189 5. PARAMETERS 5.1.6 Extension setting 3 parameters ([Pr. PF_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PF01 For manufacturer setting 0000h PF02 0000h PF03 0000h PF04 PF05 PF06 0000h PF07 PF08 PF09 *FOP5 Function selection F-5 0000h PF10 For manufacturer setting...
- Page 190 5. PARAMETERS 5.1.7 Linear servo motor/DD motor setting parameters ([Pr. PL_ _ ]) Operation Control mode mode Initial Symbol Name Unit value PL01 *LIT1 Linear servo motor/DD motor function selection 1 0301h PL02 *LIM Linear encoder resolution - Numerator 1000 [µm] PL03 *LID...
-
Page 191: Basic Setting Parameters ([Pr. Pa
5. PARAMETERS 5.2 Detailed list of parameters POINT Set a value to each "x" in the "Setting digit" columns. 5.2.1 Basic setting parameters ([Pr. PA_ _ ]) Control Initial No./symbol/ Setting Function value mode name digit [unit] PA01 _ _ _ x Control mode selection *STY Select a control mode. - Page 192 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA02 _ _ x x Regenerative option *REG Select the regenerative option. Regenerative Incorrect setting may cause the regenerative option to burn. option If a selected regenerative option is not for use with the servo amplifier, [AL. 37 Parameter error] occurs.
- Page 193 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA03 _ _ _ x Absolute position detection system selection *ABS Set this parameter when using the absolute position detection system in the position control mode. Absolute position 0: Disabled (incremental system) detection 1: Enabled (absolute position detection system by DIO)
- Page 194 5. PARAMETERS Initial No./symbol/ Setting Control Function value name digit mode [unit] PA06 Set the numerator of the electronic gear. To enable the parameter, set "Electronic gear selection" to "Electronic gear (0 _ _ _)" or "J3A electronic gear setting value compatibility mode (2 _ _ _)" in [Pr. PA21]. Electronic gear The following shows a standard of the setting range of the electronic gear.
- Page 195 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA08 _ _ _ x Gain adjustment mode selection Select the gain adjustment mode. Auto tuning 0: 2 gain adjustment mode 1 (interpolation mode) mode 1: Auto tuning mode 1 2: Auto tuning mode 2 3: Manual mode 4: 2 gain adjustment mode 2...
- Page 196 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA09 Set a response of the auto tuning. Machine characteristic Machine characteristic Auto tuning Guideline for Guideline for response Setting Setting machine machine value value Response Response resonance resonance frequency [Hz] frequency [Hz]...
- Page 197 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PA13 _ _ _ x Command input pulse train form selection *PLSS 0: Forward/reverse rotation pulse train Command 1: Signed pulse train pulse input 2: A-phase/B-phase pulse train (The servo amplifier imports input pulses after form multiplying by four.) Refer to table 5.3 for settings.
- Page 198 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA14 Select the servo motor rotation direction or linear servo motor travel direction for the input pulse train. *POL Rotation Servo motor rotation direction/ direction Setting linear servo motor travel direction selection/ value When forward rotation...
- Page 199 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PA17 When you use a linear servo motor, select its model from [Pr. PA17] and [Pr. PA18]. 0000h Set this and [Pr. PA18] at a time. *MSR Refer to the following table for settings. Servo motor series setting Parameter...
- Page 200 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA18 When you use a linear servo motor, select its model from [Pr. PA17] and [Pr. PA18]. 0000h Set this and [Pr. PA17] at a time. *MTY Refer to the table of [Pr. PA17] for settings. Servo motor type setting PA19...
- Page 201 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PA21 _ _ _ x One-touch tuning function selection *AOP3 0: Disabled Function 1: Enabled selection A-3 When the digit is "0", the one-touch tuning is not available. _ _ x _ For manufacturer setting _ x _ _ x _ _ _ Electronic gear selection...
-
Page 202: Gain/Filter Setting Parameters ([Pr. Pb
5. PARAMETERS 5.2.2 Gain/filter setting parameters ([Pr. PB_ _ ]) Initial Control No./symbol/ Setting mode Function value name digit [unit] PB01 _ _ _ x Filter tuning mode selection FILT Set the adaptive filter tuning. Adaptive Select the adjustment mode of the machine resonance suppression filter 1. Refer to tuning mode section 7.1.2 for details. - Page 203 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB04 Set the feed forward gain. When the setting is 100%, the droop pulses during operation at constant speed are nearly zero. However, sudden acceleration/deceleration will increase the overshoot. Feed forward As a guideline, when the feed forward gain setting is 100%, set 1 s or more as the gain...
- Page 204 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB09 Set the gain of the speed loop. [rad/s] Set this parameter when vibration occurs on machines of low rigidity or large backlash. Increasing the setting value will also increase the response level but will Speed loop be liable to generate vibration and/or noise.
- Page 205 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB16 Set the shape of the machine resonance suppression filter 2. NHQ2 _ _ _ x Machine resonance suppression filter 2 selection Notch shape 0: Disabled selection 2 1: Enabled _ _ x _ Notch depth selection 0: -40 dB...
- Page 206 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB18 Set the low-pass filter. 3141 [rad/s] The following shows a relation of a required parameter to this parameter. Low-pass filter setting Setting range: 100 to 18000 [Pr. PB23] [Pr.
- Page 207 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PB24 _ _ _ x Slight vibration suppression control selection *MVS Select the slight vibration suppression control. Slight 0: Disabled vibration 1: Enabled suppression To enable the slight vibration suppression control, set "Gain adjustment mode control selection"...
- Page 208 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PB31 Set the speed loop gain when the gain switching is enabled. [rad/s] VG2B When you set a value less than 20 rad/s, the value will be the same as [Pr. PB09]. Speed loop This parameter is enabled only when "Gain adjustment mode selection"...
- Page 209 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB45 Set the command notch filter. CNHF _ _ x x Command notch filter setting frequency selection Command Refer to table 5.6 for the relation of setting values to frequency. notch filter _ x _ _ Notch depth selection Refer to table 5.7 for details.
- Page 210 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB46 Set the notch frequency of the machine resonance suppression filter 3. 4500 [Hz] To enable the setting value, set "Machine resonance suppression filter 3 selection" to "Enabled (_ _ _ 1)" in [Pr. PB47]. Machine resonance suppression...
- Page 211 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB51 Set the shape of the machine resonance suppression filter 5. NHQ5 When "Robust filter selection" is "Enabled (_ _ _ 1)" in [Pr. PE41], the machine resonance suppression filter 5 is not available.
- Page 212 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB56 Set the vibration frequency for vibration suppression control 2 when the gain switching is enabled. [Hz] VRF21B When you set a value less than 0.1 Hz, the value will be the same as [Pr. PB52]. Vibration suppression This parameter will be enabled only when the following conditions are fulfilled.
-
Page 213: Extension Setting Parameters ([Pr. Pc
5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PB60 Set the model loop gain when the gain switching is enabled. [rad/s] PG1B When you set a value less than 1.0 rad/s, the value will be the same as [Pr. PB07]. Model loop This parameter will be enabled only when the following conditions are fulfilled. - Page 214 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC03 Start/stop the servo motor or linear servo motor smoothly. [ms] Set the time of the arc part for S-pattern acceleration/deceleration. S-pattern acceleration/ Speed command deceleration time constant 0 r/min (0 mm/s) Time...
- Page 215 5. PARAMETERS Control Initial No./symbol/ Setting mode Function value name digit [unit] PC06 Set the speed 2 of internal speed commands. [r/min]/ [mm/s] Internal Setting range: 0 to permissible instantaneous speed speed Set the speed 2 of internal speed limits. command 2 Internal Setting range: 0 to permissible instantaneous speed...
- Page 216 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC13 Set the output torque/thrust at the analog torque/thrust command voltage (TC = ±8 100.0 V) of +8 V on the assumption that the maximum torque/thrust is 100.0%. For example, set 50.0.
- Page 217 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC14 _ _ x x Analog monitor 1 output selection MOD1 Select a signal to output to MO1 (Analog monitor 1). Refer to appendix 8 (3) for detection point of output selection. Analog monitor 1 Refer to table 5.8 for settings.
- Page 218 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PC15 _ _ x x Analog monitor 2 output selection MOD2 Select a signal to output to MO2 (Analog monitor 2). Refer to appendix 8 (3) for detection point of output selection. Analog monitor 2 Refer to [Pr.
- Page 219 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC20 Set a station No. of the servo amplifier for RS-422 and USB communication. [Station] *SNO Always set one station to one axis of the servo amplifier. Setting one station number to two or more stations will disable a normal communication.
- Page 220 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PC24 _ _ _ x In-position range unit selection *COP3 Select a unit of in-position range. Function 0: Command input pulse unit selection C-3 1: Servo motor encoder pulse unit _ _ x _ For manufacturer setting _ x _ _ x _ _ _ Error excessive alarm level unit selection...
- Page 221 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PC36 _ _ x x Status display selection at power-on *DMD Select a status display shown at power-on. Status display 00: Cumulative feedback pulses selection 01: Servo motor speed/linear servo motor speed 02: Droop pulses 03: Cumulative command pulses 04: Command pulse frequency...
- Page 222 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC37 Set the offset voltage of VC (Analog speed command). The value For example, if CCW rotation or positive direction travel is provided by switching on differs ST1 (Forward rotation start) while applying 0 V to VC, set a negative value. Analog speed depending command...
- Page 223 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC45 _ _ _ X Encoder pulse count polarity selection *COPA Select a polarity of the linear encoder or load-side encoder. Function 0: Encoder pulse increases in the servo motor CCW or positive direction. selection C-A 1: Encoder pulse decreases in the servo motor CCW or positive direction.
- Page 224 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PC54 Set the compensation amount of the vertical axis freefall prevention function. [0.0001 RSUP1 Set it per servo motor rotation amount or linear servo motor travel distance. rev]/ Vertical axis When setting a positive value, the servo motor or linear servo motor moves in the [0.01...
-
Page 225: I/O Setting Parameters ([Pr. Pd
5. PARAMETERS 5.2.4 I/O setting parameters ([Pr. PD_ _ ]) Initial Control No./symbol/ Setting mode Function value name digit [unit] PD01 Select input devices to turn on them automatically. *DIA1 _ _ _ x _ _ _ x (BIN): For manufacturer setting Input signal (HEX) _ _ x _ (BIN): For manufacturer setting... - Page 226 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PD03 Any input device can be assigned to the CN1-15 pin. *DI1L _ _ x x Position control mode - Device selection Input device Refer to table 5.9. selection 1L x x _ _ Speed control mode - Device selection...
- Page 227 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PD07 Any input device can be assigned to the CN1-17 pin. *DI3L When "_ _ _ 1" is set in [Pr. PA03] and absolute position detection system by DIO is selected, the CN1-17 pin will become ABSM (ABS transfer mode).
- Page 228 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PD19 Any input device can be assigned to the CN1-44 pin. *DI9L _ _ x x Position control mode - Device selection Input device Refer to table 5.9 in [Pr. PD03] for settings. selection 9L x x _ _ Speed control mode - Device selection...
- Page 229 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PD24 _ _ x x Device selection *DO2 Any output device can be assigned to the CN1-23 pin. Output device When "Enabled (absolute position detection system by DIO) (_ _ _ 1)" is selected in selection 2 [Pr.
- Page 230 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PD32 _ _ _ x CR (Clear) selection *DOP3 Set CR (Clear). Function 0: Deleting droop pulses at the leading edge of turning on of CR selection D-3 1: Continuous deleting of droop pulses while CR is on _ _ x _ For manufacturer setting _ x _ _...
-
Page 231: Extension Setting 2 Parameters ([Pr. Pe
5. PARAMETERS 5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ]) Initial Control No./symbol/ Setting Function value mode name digit [unit] PE01 _ _ _ x Fully closed loop function selection *FCT1 The fully closed loop function is selected. Fully closed 0: Always enabled loop function 1: Switching with CLD (Fully closed loop control selection) - Page 232 5. PARAMETERS Initial Control No./symbol/ Setting Function value mode name digit [unit] PE06 Set [AL. 42.9 Fully closed loop control error by speed deviation] of the fully closed loop control error detection. When the speed deviation between the servo motor [r/min]/ encoder and load-side encoder becomes larger than the setting value, the alarm will [mm/s]...
-
Page 233: Extension Setting 3 Parameters ([Pr. Pf
5. PARAMETERS 5.2.6 Extension setting 3 parameters ([Pr. PF_ _ ]) Initial Control No./symbol/ Setting mode Function value name digit [unit] PF09 _ _ _ x Electronic dynamic brake selection *FOP5 0: Automatic (enabled only for specified servo motors) Function 2: Disabled selection F-5 Refer to the following table for the specified servo motors. - Page 234 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PF25 Set the time of the [AL. 10.1 Voltage drop in the control circuit power] occurrence. [ms] CVAT To disable the parameter, set "Disabled (_ 0 _ _)" of "SEMI-F47 function selection" in [Pr.
-
Page 235: Linear Servo Motor/Dd Motor Setting Parameters ([Pr. Pl_ _ ])
5. PARAMETERS 5.2.7 Linear servo motor/DD motor setting parameters ([Pr. PL_ _ ]) Initial Control No./symbol/ Setting mode Function value name digit [unit] PL01 _ _ _ x Linear servo motor/DD motor magnetic pole detection selection *LIT1 The setting value "0" will be enabled only with absolute position linear encoders. Linear servo 0: Magnetic pole detection disabled motor/DD... - Page 236 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PL05 Set the position deviation error detection level of the servo control error detection. [mm]/ When the deviation between a model feedback position and actual feedback position [0.01 is larger than the setting value, [AL.
- Page 237 5. PARAMETERS Control Initial No./symbol/ Setting Function value mode name digit [unit] PL17 _ _ _ x Response selection LTSTS Set a response of the minute position detection method. Magnetic pole When reducing a travel distance at the magnetic pole detection, increase the setting detection - value.
-
Page 238: Normal Gain Adjustment 6- 1 To
6. NORMAL GAIN ADJUSTMENT 6. NORMAL GAIN ADJUSTMENT POINT In the torque control mode, you do not need to make gain adjustment. Before making gain adjustment, check that your machine is not being operated at maximum torque of the servo motor. If operated over maximum torque, the machine may vibrate and may operate unexpectedly. -
Page 239: Adjustment Using Mr Configurator2
6. NORMAL GAIN ADJUSTMENT (2) Adjustment sequence and mode usage Start Interpolation 2 gain adjustment mode 1 made for 2 or more (interpolation mode) axes? The load fluctuation is large during driving? One-touch tuning Handle the error Error handling Finished normally? Auto tuning mode 1 is possible? Adjustment OK? -
Page 240: One-Touch Tuning Flowchart
6. NORMAL GAIN ADJUSTMENT 6.2 One-touch tuning POINT When executing the one-touch tuning, check the [Pr. PA21 One-touch tuning function selection] is "_ _ _ 1" (initial value). You can execute the one-touch tuning with MR Configurator2 or push buttons. The following parameters are set automatically with one-touch tuning. - Page 241 6. NORMAL GAIN ADJUSTMENT (2) When you use push buttons Make one-touch tuning as follows. Start Startup a system referring to chapter 4. Startup of the system Rotate the servo motor by an external controller, etc. (The one-touch tuning cannot be performed if the Operation servo motor is not operating.) Push the "MODE"...
-
Page 242: Display Transition And Operation Procedure Of One-Touch Tuning
6. NORMAL GAIN ADJUSTMENT 6.2.2 Display transition and operation procedure of one-touch tuning (1) When you use MR Configurator2 (a) Response mode selection Select a response mode from 3 modes in the one-touch tuning window of MR Configurator2. Response mode Explanation High mode This mode is for high rigid system. - Page 243 6. NORMAL GAIN ADJUSTMENT Response Machine characteristic mode Response Low mode Basic mode High mode Guideline of corresponding machine Low response Arm robot General machine tool conveyor Precision working machine Inserter Mounter Bonder High response 6 - 6...
- Page 244 6. NORMAL GAIN ADJUSTMENT (b) One-touch tuning execution POINT For equipment in which overshoot during one-touch tuning is in the permissible level of the in-position range, changing the value of [Pr. PA25 One-touch tuning - Overshoot permissible level] will shorten the settling time and improve the response.
- Page 245 6. NORMAL GAIN ADJUSTMENT (c) One-touch tuning execution During one-touch tuning, pushing the stop button stops one-touch tuning. If the one-touch tuning is stopped, "C 0 0 0" will be displayed at status in error code. (d) If an error occur If a tuning error occurs during tuning, one-touch tuning will be forcibly terminated.
- Page 246 6. NORMAL GAIN ADJUSTMENT (g) Clearing one-touch tuning You can clear the parameter values set with one-touch tuning. Refer to table 6.1 for the parameters which you can clear. Pushing "Return to value before adjustment" in the one-touch tuning window of MR Configurator2 enables to rewrite the parameter to the value before pushing the start button.
- Page 247 6. NORMAL GAIN ADJUSTMENT (2) When you use push buttons POINT Push the "MODE" and "SET" buttons at the same time for 3 s or more to switch to the response mode selection ("AUTO.") without going through the initial screen of the one-touch tuning ("AUTO"). (a) Response mode selection Select a response mode of the one-touch tuning from 3 modes with "UP"...
- Page 248 6. NORMAL GAIN ADJUSTMENT (c) One-touch tuning execution Stop symbol The one-touch tuning mode can be stopped by pushing the "SET" button regardless of displayed item. 2 s interval The stop symbol and error code "C 000" (cancel during tuning) will be displayed by turns with 2 s interval.
- Page 249 6. NORMAL GAIN ADJUSTMENT (f) If a warning occur One-touch tuning in progress If a warning occurs during tuning, the alarm No. of the warning will be displayed. When the warning is one which continue the motor driving, the one-touch tuning will be continued.
-
Page 250: Caution For One-Touch Tuning
6. NORMAL GAIN ADJUSTMENT 6.2.3 Caution for one-touch tuning (1) The tuning is not available in the torque control mode. (2) The one-touch tuning cannot be executed while an alarm or warning which does not continue the motor driving is occurring. (3) You can execute the one-touch tuning during the following test operation modes marked by "○". -
Page 251: Auto Tuning
6. NORMAL GAIN ADJUSTMENT 6.3 Auto tuning 6.3.1 Auto tuning mode The servo amplifier has a real-time auto tuning function which estimates the machine characteristic (load to motor inertia ratio) in real time and automatically sets the optimum gains according to that value. This function permits ease of gain adjustment of the servo amplifier. -
Page 252: Auto Tuning Mode Basis
6. NORMAL GAIN ADJUSTMENT 6.3.2 Auto tuning mode basis The block diagram of real-time auto tuning is shown below. Load moment Automatic setting of inertia Encoder Loop gain Command Current PG1, PG2, control VG2, VIC Servo motor Current feedback Real-time Position/speed Set 0 or 1 to turn on. -
Page 253: Adjustment Procedure By Auto Tuning
6. NORMAL GAIN ADJUSTMENT 6.3.3 Adjustment procedure by auto tuning Since auto tuning is enabled before shipment from the factory, simply running the servo motor automatically sets the optimum gains that match the machine. Merely changing the response level setting value as required completes the adjustment. -
Page 254: Response Level Setting In Auto Tuning Mode
6. NORMAL GAIN ADJUSTMENT 6.3.4 Response level setting in auto tuning mode Set the response of the whole servo system by [Pr. PA09]. As the response level setting is increased, the track ability and settling time for a command decreases, but a too high response level will generate vibration. Hence, make setting until desired response is obtained within the vibration-free range. -
Page 255: Manual Mode
6. NORMAL GAIN ADJUSTMENT 6.4 Manual mode If you are not satisfied with the adjustment of auto tuning, you can make simple manual adjustment with three parameters. POINT If machine resonance occurs, filter tuning mode selection in [Pr. PB01] or machine resonance suppression filter in [Pr. - Page 256 6. NORMAL GAIN ADJUSTMENT (c) Parameter adjustment 1) [Pr. PB09 Speed loop gain] This parameter determines the response level of the speed control loop. Increasing this value enhances response but a too high value will make the mechanical system liable to vibrate. The actual response frequency of the speed loop is as indicated in the following expression.
- Page 257 6. NORMAL GAIN ADJUSTMENT (b) Adjustment procedure Step Operation Description Brief-adjust with auto tuning. Refer to section 6.2.3. Change the setting of auto tuning to the manual mode ([Pr. PA08]: _ _ _ 3). Set the estimated value to the load to motor inertia ratio. (If the estimate value with auto tuning is correct, setting change is not required.) Set a slightly smaller value to the model loop gain and the...
-
Page 258: Gain Adjustment Mode
6. NORMAL GAIN ADJUSTMENT 3) [Pr. PB08 Position loop gain] This parameter determines the response level to a disturbance to the position control loop. Increasing the value increases the response level to the disturbance, but a too high value will increase vibration of the mechanical system. - Page 259 6. NORMAL GAIN ADJUSTMENT (2) 2 gain adjustment mode 2 Use 2 gain adjustment mode 2 when proper gain adjustment cannot be made with 2 gain adjustment mode 1. Since the load to motor inertia ratio is not estimated in this mode, set the value of a proper load to motor inertia ratio in [Pr.
- Page 260 6. NORMAL GAIN ADJUSTMENT (4) Parameter adjustment [Pr. PB07 Model loop gain] This parameter determines the response level of the position control loop. Increasing the value improves track ability to a position command, but a too high value will make overshoot liable to occur at settling. The droop pulses value is determined by the following expression.
- Page 261 6. NORMAL GAIN ADJUSTMENT MEMO 6 - 24...
-
Page 262: Special Adjustment Functions
7. SPECIAL ADJUSTMENT FUNCTIONS 7. SPECIAL ADJUSTMENT FUNCTIONS POINT The functions given in this chapter need not be used normally. Use them if you are not satisfied with the machine status after making adjustment in the methods in chapter 6. When you use a linear servo motor, replace the following left words to the right words. - Page 263 7. SPECIAL ADJUSTMENT FUNCTIONS 7.1.1 Machine resonance suppression filter POINT The machine resonance suppression filter is a delay factor for the servo system. Therefore, vibration may increase if you set an incorrect resonance frequency or set notch characteristics too deep or too wide. If the frequency of machine resonance is unknown, decrease the notch frequency from higher to lower ones in order.
- Page 264 7. SPECIAL ADJUSTMENT FUNCTIONS (1) Function The machine resonance suppression filter is a filter function (notch filter) which decreases the gain of the specific frequency to suppress the resonance of the mechanical system. You can set the gain decreasing frequency (notch frequency), gain decreasing depth and width. Machine resonance point Frequency Notch width...
- Page 265 7. SPECIAL ADJUSTMENT FUNCTIONS (2) Parameter (a) Machine resonance suppression filter 1 ([Pr. PB13] and [Pr. PB14]) Set the notch frequency, notch depth and notch width of the machine resonance suppression filter 1 ([Pr. PB13] and [Pr. PB14]) When you select "Manual setting (_ _ _ 2)" of "Filter tuning mode selection" in [Pr. PB01], the setting of the machine resonance suppression filter 1 is enabled.
- Page 266 7. SPECIAL ADJUSTMENT FUNCTIONS 7.1.2 Adaptive filter II POINT The machine resonance frequency which adaptive filter II (adaptive tuning) can respond to is about 100 Hz to 2.25 kHz. As for the resonance frequency out of the range, set manually. When adaptive tuning is executed, vibration sound increases as an excitation signal is forcibly applied for several seconds.
- Page 267 7. SPECIAL ADJUSTMENT FUNCTIONS (3) Adaptive tuning mode procedure Adaptive tuning Operation Is the target response reached? Increase the response setting. Has vibration or unusual noise occurred? Execute or re-execute adaptive tuning. (Set [Pr. PB01] to "_ _ _ 1".) Tuning ends automatically after the If assumption fails after tuning is executed at a large vibration or predetermined period of time.
- Page 268 7. SPECIAL ADJUSTMENT FUNCTIONS 7.1.3 Shaft resonance suppression filter POINT This filter is set properly by default according to servo motor you use and load moment of inertia. For [Pr. PB23], "_ _ _ 0" (automatic setting) is recommended because setting "Shaft resonance suppression filter selection" in [Pr. PB23] or setting [Pr.
- Page 269 7. SPECIAL ADJUSTMENT FUNCTIONS 7.1.4 Low-pass filter (1) Function When a ball screw or the like is used, resonance of high frequency may occur as the response level of the servo system is increased. To prevent this, the low-pass filter is enabled for a torque command as a default.
- Page 270 7. SPECIAL ADJUSTMENT FUNCTIONS (1) Function Vibration suppression control is used to further suppress load-side vibration, such as work-side vibration and base shake. The servo motor-side operation is adjusted for positioning so that the machine does not vibrate. Servo motor side Servo motor side Load side Load side...
- Page 271 7. SPECIAL ADJUSTMENT FUNCTIONS (3) Vibration suppression control tuning procedure The following flow chart is for the vibration suppression control 1. For the vibration suppression control 2, set "_ _ 1 _" in [Pr. PB02] to execute the vibration suppression control tuning. Vibration suppression control tuning Operation Is the target response...
- Page 272 7. SPECIAL ADJUSTMENT FUNCTIONS (4) Vibration suppression control manual mode POINT When load-side vibration does not show up in servo motor-side vibration, the setting of the servo motor-side vibration frequency does not produce an effect. When the anti-resonance frequency and resonance frequency can be confirmed using the machine analyzer or external equipment, do not set the same value but set different values to improve the vibration suppression performance.
- Page 273 7. SPECIAL ADJUSTMENT FUNCTIONS Step 1 Select "Manual setting (_ _ _ 2)" of "Vibration suppression control 1 tuning mode selection" or "Manual setting (_ _ 2 _)" of "Vibration suppression control 2 tuning mode selection" in [Pr. PB02]. Step 2 Set "Vibration suppression control - Vibration frequency"...
-
Page 274: Command Notch Filter
7. SPECIAL ADJUSTMENT FUNCTIONS 7.1.6 Command notch filter POINT By using the advanced vibration suppression control II and the command notch filter, the load-side vibration of three frequencies can be suppressed. The frequency range of machine vibration, which can be supported by the command notch filter, is between 4.5 Hz and 2250 Hz. - Page 275 7. SPECIAL ADJUSTMENT FUNCTIONS (2) Parameter Set [Pr. PB45 Command notch filter] as shown below. For the command notch filter setting frequency, set the closest value to the vibration frequency [Hz] at the load side. [Pr. PB45] Notch depth Command notch filter setting frequency Depth Setting Setting...
-
Page 276: Gain Switching Function
7. SPECIAL ADJUSTMENT FUNCTIONS 7.2 Gain switching function You can switch gains with the function. You can switch gains during rotation and during stop, and can use an input device to switch gains during operation. 7.2.1 Applications The following shows when you use the function. (1) You want to increase the gains during servo-lock but decrease the gains to reduce noise during rotation. -
Page 277: Function Block Diagram
7. SPECIAL ADJUSTMENT FUNCTIONS 7.2.2 Function block diagram The control gains, load to motor inertia ratio, and vibration suppression control settings are changed according to the conditions selected by [Pr. PB26 Gain switching function] and [Pr. PB27 Gain switching condition]. [Pr. -
Page 278: Parameter
7. SPECIAL ADJUSTMENT FUNCTIONS 7.2.3 Parameter When using the gain switching function, always select "Manual mode (_ _ _ 3)" of "Gain adjustment mode selection" in [Pr. PA08 Auto tuning mode]. The gain switching function cannot be used in the auto tuning mode. - Page 279 7. SPECIAL ADJUSTMENT FUNCTIONS (2) Switchable gain parameter Before switching After switching Loop gain Parameter Symbol Name Parameter Symbol Name Load to motor inertia ratio/ PB06 Load to motor inertia ratio/ PB29 GD2B Load to motor inertia ratio/ load to motor mass ratio load to motor mass ratio load to motor mass ratio Model loop gain...
- Page 280 7. SPECIAL ADJUSTMENT FUNCTIONS (c) [Pr. PB29 Load to motor inertia ratio after gain switching] Set the load to motor inertia ratio after gain switching. If the load to motor inertia ratio does not change, set it to the same value as [Pr. PB06 Load to motor inertia ratio]. (d) [Pr.
-
Page 281: Gain Switching Procedure
7. SPECIAL ADJUSTMENT FUNCTIONS 7.2.4 Gain switching procedure This operation will be described by way of setting examples. (1) When you choose switching by input device (CDP) (a) Setting example Parameter Symbol Name Setting value Unit PB06 Load to motor inertia ratio/load to motor 4.00 [Multiplier] mass ratio... - Page 282 7. SPECIAL ADJUSTMENT FUNCTIONS (b) Switching timing chart CDP (gain switching) After-switching gain 63.4% Before-switching gain Gain switching CDT = 100 ms Model loop gain → → Load to motor inertia ratio/load to motor 4.00 → 10.00 → 4.00 mass ratio Position loop gain →...
- Page 283 7. SPECIAL ADJUSTMENT FUNCTIONS (b) Switching timing chart Command pulses Droop pulses Command pulses +CDL Droop pulses [pulse] -CDL After-switching gain 63.4% Before-switching gain Gain switching CDT = 100 ms Load to motor inertia ratio 4.00 → 10.00 → 4.00 →...
-
Page 284: Tough Drive Function
7. SPECIAL ADJUSTMENT FUNCTIONS 7.3 Tough drive function POINT Set enable/disable of the tough drive function with [Pr. PA20 Tough drive setting]. (Refer to section 5.2.1.) This function makes the equipment continue operating even under the condition that an alarm occurs. 7.3.1 Vibration tough drive function This function prevent from vibrating by resetting a filter instantaneously when machine resonance occurs due to varied vibration frequency caused machine aging. - Page 285 7. SPECIAL ADJUSTMENT FUNCTIONS The following shows the function block diagram of the vibration tough drive function. The function detects machine resonance frequency and compare it with [Pr. PB13] and [Pr. PB15], and reset a machine resonance frequency of a parameter whose set value is closer. Parameter that is reset with vibration Filter...
-
Page 286: Instantaneous Power Failure Tough Drive Function
7. SPECIAL ADJUSTMENT FUNCTIONS 7.3.2 Instantaneous power failure tough drive function The instantaneous power failure tough drive function avoids [AL. 10 Undervoltage] even when an instantaneous power failure occurs during operation. When the instantaneous power failure tough drive activates, the function will increase the tolerance against instantaneous power failure using the electrical energy charged in the capacitor in the servo amplifier and will change an alarm level of [AL. - Page 287 7. SPECIAL ADJUSTMENT FUNCTIONS (2) Instantaneous power failure time of the control circuit power supply < [Pr. PF25 SEMI-F47 function - Instantaneous power failure detection time] Operation status differs depending on how bus voltage decrease. (a) When the bus voltage decrease lower than undervoltage level within the instantaneous power failure time of the control circuit power supply [AL.
- Page 288 7. SPECIAL ADJUSTMENT FUNCTIONS (b) When the bus voltage does not decrease lower than 158 V DC within the instantaneous power failure time of the control circuit power supply The operation continues without alarming. Instantaneous power failure time of the control circuit power supply Control circuit power supply...
-
Page 289: Compliance With Semi-F47 Standard
(b) [AL. 10.2 Voltage drop in the main circuit power] will occur when bus voltage is as follows. Table 7.1 Voltages which trigger [AL. 10.2 Voltage drop in the main circuit power] Servo amplifier Bus voltage which triggers alarm MR-J4-10A(-RJ) 158 V DC MR-J4-700A(-RJ) MR-J4-11KA(-RJ) - Page 290 = rated voltage × 50%, instantaneous power failure time = 200 ms) Tolerance against Instantaneous maximum instantaneous Servo amplifier model output [W] power failure [W] (voltage drop between lines) MR-J4-10A(-RJ) MR-J4-20A(-RJ) MR-J4-40A(-RJ) 1400 MR-J4-60A(-RJ) 2100 MR-J4-70A(-RJ) 2625 1150...
- Page 291 7. SPECIAL ADJUSTMENT FUNCTIONS MEMO 7 - 30...
-
Page 292: Troubleshooting
8. TROUBLESHOOTING 8. TROUBLESHOOTING POINT Refer to "MELSERVO-J4 Servo Amplifier Instruction Manual (Troubleshooting)" for details of alarms and warnings. As soon as an alarm occurs, turn SON (Servo-on) off and interrupt the power. [AL. 37 Parameter error] and warnings are not recorded in the alarm history. When an error occurs during operation, the corresponding alarm and warning are displayed. - Page 293 8. TROUBLESHOOTING Alarm code Alarm deactivation Stop Detail System Name Detail name number (Note 2, (Bit 2) (Bit 1) (Bit 0) Encoder initial communication - 16.1 Receive data error 1 Encoder initial communication - 16.2 Receive data error 2 Encoder initial communication - 16.3 Receive data error 3 Encoder initial communication -...
- Page 294 8. TROUBLESHOOTING Alarm code Alarm deactivation Stop Detail System Name Detail name number (Note 2, (Bit 2) (Bit 1) (Bit 0) Initial magnetic pole detection - 27.1 Abnormal termination Initial magnetic pole detection - 27.2 Time out error Initial magnetic pole detection - 27.3 Limit switch error Initial magnetic pole...
- Page 295 8. TROUBLESHOOTING Alarm code Alarm deactivation Stop Detail System Name Detail name number (Note 2, (Bit 2) (Bit 1) (Bit 0) Abnormal temperature of servo 46.1 motor 1 (Note 1) (Note 1) (Note 1) Abnormal temperature of servo 46.2 motor 2 (Note 1) (Note 1) (Note 1) Servo motor overheat 46.3...
- Page 296 8. TROUBLESHOOTING Alarm code Alarm deactivation Stop Detail System Name Detail name number (Note 2, (Bit 2) (Bit 1) (Bit 0) Load-side encoder communication 71.1 - Receive data error 1 Load-side encoder communication 71.2 - Receive data error 2 Load-side encoder communication 71.3 - Receive data error 3 Load-side encoder communication...
- Page 297 8. TROUBLESHOOTING Table 8.2 Warning list Stop method Detail Name Detail name number (Note 2, Servo amplifier overheat 91.1 Main circuit device overheat warning warning (Note 1) Encoder battery cable disconnection 92.1 Battery cable warning disconnection warning 92.3 Battery degradation ABS data transfer requirement warning ABS data transfer warning 93.1...
- Page 298 8. TROUBLESHOOTING Note 1. Leave for about 30 minutes of cooling time after removing the cause of occurrence. 2. The following shows two stop methods of DB and SD. DB: Stops with dynamic brake. (Coasts for the servo amplifier without dynamic brake.) SD: Forced stop deceleration 3.
- Page 299 8. TROUBLESHOOTING MEMO 8 - 8...
-
Page 300: Outline Drawings
9 OUTLINE DRAWINGS 9. OUTLINE DRAWINGS 9.1 Servo amplifier POINT Only MR-J4-_A_-RJ are shown for dimensions. MR-J4-_A_ does not have CN2L and CN7 connectors. The dimensions of MR-J4-_A_ are the same as those of MR-J4-_A_-RJ except CN2L and CN7 connectors. 9 - 1... - Page 301 9 OUTLINE DRAWINGS (1) 200 V class (a) MR-J4-10A(-RJ)/MR-J4-20A(-RJ) [Unit: mm] φ6 mounting hole Approx. 80 Lock knob CNP1 CNP2 CNP3 With Approx. 69.3 MR-BAT6V1SET Approx. 38.5 Mass: 0.8 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m]...
- Page 302 9 OUTLINE DRAWINGS (b) MR-J4-40A(-RJ)/MR-J4-60A(-RJ) [Unit: mm] Approx. 80 φ6 mounting hole Lock knob CNP1 CNP2 CNP3 Approx. 69.3 Approx. 38.5 With MR-BAT6V1SET Mass: 1.0 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] CNP1 CNP2 CNP3 Approx. 40 2-M5 screw Screw size: M4 Tightening torque: 1.2 [N•m]...
- Page 303 9 OUTLINE DRAWINGS (c) MR-J4-70A(-RJ)/MR-J4-100A(-RJ) [Unit: mm] Approx. 80 φ6 mounting hole Lock knob Exhaust CNP1 CNP2 CNP3 Cooling fan air intake Approx. 69.3 Approx. 38.5 With MR-BAT6V1SET Mass: 1.4 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] CNP1 CNP2 CNP3...
- Page 304 9 OUTLINE DRAWINGS (d) MR-J4-200A(-RJ) [Unit: mm] φ6 mounting hole Approx. 80 Lock knob Exhaust CNP1 CNP2 CNP3 Cooling fan Approx. 69.3 air intake Approx. 38.5 With MR-BAT6V1SET Mass: 2.1 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] CNP1 CNP2 CNP3...
- Page 305 9 OUTLINE DRAWINGS (e) MR-J4-350A(-RJ) [Unit: mm] Approx. 80 Mounting hole Lock knob Exhaust CNP1 CNP3 CNP2 Cooling fan air intake Approx. 69.3 Approx. 38.5 With MR-BAT6V1SET Mass: 2.3 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] CNP1 CNP2 CNP3...
- Page 306 9 OUTLINE DRAWINGS (f) MR-J4-500A(-RJ) [Unit: mm] Approx. 25 Approx. 80 Approx. 28 2-φ6 mounting hole Cooling fan exhaust With MR-BAT6V1SET Intake Mass: 4.0 [kg] Mounting screw Terminal Screw size: M5 Screw size: M3.5 Tightening torque: 3.24 [N•m] Tightening torque: 0.8 [N•m] Approx.
- Page 307 9 OUTLINE DRAWINGS (g) MR-J4-700A(-RJ) [Unit: mm] Approx. 80 Approx. 28 2-φ6 mounting hole Cooling fan exhaust With MR-BAT6V1SET Intake Built-in regenerative resistor lead terminal fixing screw Screw size: M4 Tightening torque: 1.2 [N•m] Mass: 6.2 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] N- P3 P4...
- Page 308 9 OUTLINE DRAWINGS (h) MR-J4-11KA(-RJ)/MR-J4-15KA(-RJ) [Unit: mm] Approx. 80 2-φ6 mounting hole Approx. 28 10.5 Cooling fan exhaust 24.2 TE1-1 TE1-2 Intake 25.5 22.8 With MR-BAT6V1SET 224.2 57.9 5 × 25.5 (= 127.5) 237.4 Mass: 13.4 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] TE1-1...
- Page 309 9 OUTLINE DRAWINGS (i) MR-J4-22KA(-RJ) [Unit: mm] Approx. 80 Approx. 28 2-φ12 mounting hole Cooling fan exhaust TE1-1 32.7 TE1-2 Intake 188.5 22.8 With 223.4 59.9 127.5 MR-BAT6V1SET 235.4 Mass: 18.2 [kg] Mounting screw Terminal Screw size: M10 Tightening torque: 3.24 [N•m] TE1-1 L2 L3 Approx.
- Page 310 9 OUTLINE DRAWINGS (2) 400 V class (a) MR-J4-60A4(-RJ)/MR-J4-100A4(-RJ) [Unit: mm] φ6 mounting hole Approx. 80 Lock knob CNP1 CNP2 CNP3 Approx. 69.3 Approx. 38.5 With MR-BAT6V1SET Mass: 1.7 [kg] Mounting screw Terminal Screw size: M5 CNP1 Tightening torque: 3.24 [N•m] Approx.
- Page 311 9 OUTLINE DRAWINGS (b) MR-J4-200A4(-RJ) [Unit: mm] φ6 mounting hole Approx. 80 Lock knob Exhaust CNP1 CNP2 CNP3 Cooling fan intake Approx. 69.3 Approx. 38.5 With MR-BAT6V1SET Mass: 2.1 [kg] Mounting screw Terminal Screw size: M5 CNP1 Tightening torque: 3.24 [N•m] Approx.
- Page 312 9 OUTLINE DRAWINGS (c) MR-J4-350A4(-RJ) [Unit: mm] Approx. 80 2-φ6 mounting hole Approx. 28 Lock knob Cooling fan exhaust CNP1 CNP2 CNP3 With MR-BAT6V1SET Intake Mass: 3.6 [kg] Mounting screw Terminal Screw size: M5 CNP1 Tightening torque: 3.24 [N•m] Approx. 105 Approx.
- Page 313 9 OUTLINE DRAWINGS (d) MR-J4-500A4(-RJ) [Unit: mm] Approx. 28 Approx. 80 Approx. 200 Approx. 28 Cooling fan exhaust With Intake MR-BAT6V1SET Built-in regenerative resistor lead terminal fixing screw Screw size: M4 Tightening torque: 1.2 [N•m] Mass: 4.3 [kg] Mounting screw Terminal Screw size: M5 N- P3 P4...
- Page 314 9 OUTLINE DRAWINGS (e) MR-J4-700A4(-RJ) [Unit: mm] Approx. 80 Approx. 28 2-φ6 mounting hole Cooling fan exhaust With MR-BAT6V1SET Intake Built-in regenerative resistor lead terminal fixing screw Screw size: M4 Tightening torque: 1.2 [N•m] Mass: 6.5 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] N- P3 P4...
- Page 315 9 OUTLINE DRAWINGS (f) MR-J4-11KA4(-RJ)/MR-J4-15KA4(-RJ) [Unit: mm] Approx. 80 2-φ6 mounting hole Approx. 28 10.5 Cooling fan exhaust 24.2 TE1-1 TE1-2 Intake 25.5 22.8 With MR-BAT6V1SET 224.2 57.9 5 × 25.5 (= 127.5) 237.4 Mass: 13.4 [kg] Mounting screw Terminal Screw size: M5 Tightening torque: 3.24 [N•m] TE1-1...
- Page 316 9 OUTLINE DRAWINGS (g) MR-J4-22KA4(-RJ) [Unit: mm] Approx. 80 Approx. 28 2-φ12 mounting hole Cooling fan exhaust TE1-1 32.7 TE1-2 Intake 188.5 22.8 With 223.4 59.9 127.5 MR-BAT6V1SET 235.4 Mass: 18.2 [kg] Mounting screw Terminal Screw size: M10 Tightening torque: 3.24 [N•m] TE1-1 L2 L3 Approx.
-
Page 317: Connector
9 OUTLINE DRAWINGS 9.2 Connector (1) Miniature delta ribbon (MDR) system (3M) (2) One-touch lock type [Unit: mm] Logo etc, are indicated here. 12.7 Variable dimensions Connector Shell kit 10150-3000PE 10350-52F0-008 41.1 52.4 18.0 14.0 17.0 (b) Jack screw M2.6 type This is not available as option. - Page 318 9 OUTLINE DRAWINGS (2) SCR connector system (3M) Receptacle: 36210-0100PL Shell kit: 36310-3200-008 [Unit: mm] 39.5 34.8 9 - 19...
- Page 319 9 OUTLINE DRAWINGS MEMO 9 - 20...
-
Page 320: Characteristics
10. CHARACTERISTICS 10. CHARACTERISTICS POINT For the characteristics of the linear servo motor and the direct drive motor, refer to sections 14.4 and 15.4. 10.1 Overload protection characteristics An electronic thermal is built in the servo amplifier to protect the servo motor, servo amplifier and servo motor power wires from overloads. - Page 321 10. CHARACTERISTICS The following graphs show overload protection characteristics. 1000 1000 Operating Operating Servo-lock Servo-lock (Note 1, 2) Load ratio [%] (Note 1, 2, 3) Load ratio [%] Characteristics a Characteristics b 1000 1000 Operating Operating Servo-lock Servo-lock (Note 1, 3) (Note 1, 3) Load ratio [%] Load ratio [%]...
- Page 322 10. CHARACTERISTICS 10000 1000 Operating Servo-lock (Note 1) Load ratio [%] Characteristics e Note 1. If operation that generates torque more than 100% of the rating is performed with an abnormally high frequency in a servo motor stop status (servo-lock status) or in a 30 r/min or less low-speed operation status, the servo amplifier may malfunction regardless of the electronic thermal protection.
-
Page 323: Power Supply Capacity And Generated Loss
Power supply Servo amplifier Servo motor heat dissipation in the cabinet capacity At rated output With servo-off when cooled [kVA] outside the cabinet] (Note 3) HG-MR053 HG-MR13 MR-J4-10A(-RJ) HG-KR053 HG-KR13 HG-MR23 MR-J4-20A(-RJ) HG-KR23 HG-MR43 MR-J4-40A(-RJ) HG-KR43 HG-SR52 MR-J4-60A(-RJ) HG-SR51 HG-JR53 HG-MR73... - Page 324 10. CHARACTERISTICS (Note 2) Servo amplifier-generated heat [W] At rated output (Note 1) Area required for [Generated heat Power supply Servo amplifier Servo motor heat dissipation in the cabinet capacity At rated output With servo-off when cooled [kVA] outside the cabinet] (Note 3) HG-JR903 MR-J4-11KA(-RJ)
- Page 325 10. CHARACTERISTICS (2) Heat dissipation area for an enclosed type cabinet The enclosed type cabinet (hereafter called the cabinet) which will contain the servo amplifier should be designed to ensure that its temperature rise is within +10 °C at the ambient temperature of 40 °C. (With an approximately 5 °C safety margin, the system should operate within a maximum 55 °C limit.) The necessary cabinet heat dissipation area can be calculated by equation 10.1.
-
Page 326: Dynamic Brake Characteristics
10. CHARACTERISTICS 10.3 Dynamic brake characteristics POINT Do not use dynamic brake to stop in a normal operation as it is the function to stop in emergency. For a machine operating at the recommended load to motor inertia ratio or less, the estimated number of usage times of the dynamic brake is 1000 times while the machine decelerates from the rated speed to a stop once in 10 minutes. - Page 327 10. CHARACTERISTICS (2) Dynamic brake time constant The following shows necessary dynamic brake time constant τ for equation 10.2. (a) 200 V class 1000 2000 3000 4000 5000 6000 1000 2000 3000 4000 5000 6000 Speed [r/min] Speed [r/min] HG-MR series HG-KR series 152 502 750 1000 1250 1500...
- Page 328 10. CHARACTERISTICS (b) 400 V class 11K1M4 3524 22K1M4 15K1M4 2024 5024 1024 7024 1524 500 1000 1500 2000 2500 3000 500 1000 1500 2000 2500 3000 Speed [r/min] Speed [r/min] HG-SR series HG-JR1500r/min series 7034 9034 1034 3534 5034 2034 1534 1000 2000 3000 4000 5000 6000...
-
Page 329: Permissible Load To Motor Inertia When The Dynamic Brake Is Used
10. CHARACTERISTICS 10.3.2 Permissible load to motor inertia when the dynamic brake is used Use the dynamic brake under the load to motor inertia ratio indicated in the following table. If the load inertia moment is higher than this value, the dynamic brake may burn. If the load to motor inertia ratio exceeds the indicated value, contact your local sales office. -
Page 330: Cable Bending Life
10. CHARACTERISTICS 10.4 Cable bending life The bending life of the cables is shown below. This graph calculated values. Since they are not guaranteed values, provide a little allowance for these values. 1 × 10 5 × 10 1 × 10 Long bending life encoder cable 5 ×... -
Page 331: Inrush Currents At Power-On Of Main Circuit And Control Circuit
480 V AC (MR-J4-_A4(-RJ) servo amplifier) is applied at the power supply capacity of 2500 kVA and the wiring length of 1 m. When you use a 1-phase 200 V AC power supply with MR-J4-10A(-RJ) to MR- J4-70A(-RJ), the inrush currents of the main circuit power supply are the same. -
Page 332: Options And Auxiliary Equipment
11. OPTIONS AND AUXILIARY EQUIPMENT 11. OPTIONS AND AUXILIARY EQUIPMENT Before connecting any option or peripheral equipment, turn off the power and wait for 15 minutes or more until the charge lamp turns off. Then, confirm that the WARNING voltage between P+ and N- is safe with a voltage tester and others. Otherwise, an electric shock may occur. -
Page 333: Combinations Of Cable/Connector Sets
11. OPTIONS AND AUXILIARY EQUIPMENT 11.1.1 Combinations of cable/connector sets For MR-J4-_A_ servo amplifier Operation panel Personal computer Servo amplifier Controller (Packed with the servo amplifier) (Note 1) CNP1 Safety logic unit MR-J3-D05 (Note 2) CNP2 CN10 CNP3 Refer to "Servo Motor Instruction Manual (Vol. 3)" for options for servo motor power supply, electromagnetic brake, and encoder. - Page 334 11. OPTIONS AND AUXILIARY EQUIPMENT For MR-J4-_A_-RJ servo amplifier Operation panel Personal computer Servo amplifier Controller (Packed with the servo amplifier) (Note 1) CNP1 Safety logic unit MR-J3-D05 (Note 2) CNP2 CN10 CNP3 CN2L Refer to "Servo Motor Instruction Manual (Vol. 3)" for options for servo motor power supply, electromagnetic brake, and encoder.
- Page 335 11. OPTIONS AND AUXILIARY EQUIPMENT Name Model Description Application Servo amplifier Supplied power connector with 200 V class servo amplifiers of 1 kW or CNP1 Connector: CNP2 Connector: CNP3 Connector: less. 06JFAT-SAXGDK-H7.5 05JFAT-SAXGDK-H5.0 03JFAT-SAXGDK-H7.5 (JST) (JST) (JST) Applicable wire size: 0.8 mm to 2.1 mm (AWG 18 to 14) Insulator OD: to 3.9 mm...
-
Page 336: Mr-D05Udl3M-B Sto Cable
11. OPTIONS AND AUXILIARY EQUIPMENT Name Model Description Application Monitor cable MR-J3CN6CBL1M CN6 connector 3 (Red) Cable length: 1 m Housing: 51004-0300 2 (White) Terminal: 50011-8100 1 (Black) (Molex) STO cable MR-D05UDL3M-B Connector set: 2069250-1 Connection cable for (TE Connectivity) the CN8 connector Short-circuit... -
Page 337: Regenerative Options
MR-RB50 MR-RB5N MR-RB51 regenerative [40 Ω] [40 Ω] [13 Ω] [9 Ω] [6.7 Ω] [40 Ω] resistor [13 Ω] [9 Ω] [6.7 Ω] MR-J4-10A (-RJ) MR-J4-20A (-RJ) MR-J4-40A (-RJ) MR-J4-60A (-RJ) MR-J4-70A (-RJ) MR-J4-100A (-RJ) MR-J4-200A (-RJ) MR-J4-350A (-RJ) - Page 338 11. OPTIONS AND AUXILIARY EQUIPMENT (2) 400 V class Regenerative power [W] (Note 1) (Note 1) (Note 1) (Note 1) (Note 1) (Note 1) (Note 1) Built-in Servo amplifier RB1H-4 regenerative RB3M-4 RB3G-4 RB5G-4 RB34-4 RB54-4 RB3U-4 RB5U-4 resistor [82 Ω] [120 Ω] [47 Ω] [47 Ω]...
-
Page 339: Selection Of Regenerative Option
11. OPTIONS AND AUXILIARY EQUIPMENT 11.2.2 Selection of regenerative option (1) Rotary servo motor and direct drive motor Use the following method when regeneration occurs continuously in vertical motion applications or when it is desired to make an in-depth selection of the regenerative option. (a) Regenerative energy calculation tf (1 cycle) Time... - Page 340 The following table lists the efficiencies and other data of the servo motor and servo amplifier in the regenerative mode. Inverse Capacitor Inverse Capacitor Servo amplifier Servo amplifier efficiency [%] charging [J] efficiency [%] charging [J] MR-J4-10A(-RJ) MR-J4-60A4(-RJ) MR-J4-20A(-RJ) MR-J4-100A4(-RJ) MR-J4-40A(-RJ) MR-J4-200A4(-RJ) MR-J4-60A(-RJ) MR-J4-350A4(-RJ) MR-J4-70A(-RJ) MR-J4-500A4(-RJ) MR-J4-100A(-RJ) MR-J4-700A4(-RJ)
- Page 341 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Linear servo motor (a) Thrust and energy calculation Liner servo motor Feed speed secondary-side (magnet) Load Positive direction Time Negative Liner servo motor direction primary-side (coil) Liner servo motor psa1 psd1 psa2 psd2 The following shows equations of the linear servo motor thrust and energy at the driving pattern above.
-
Page 342: Parameter Setting
11. OPTIONS AND AUXILIARY EQUIPMENT 11.2.3 Parameter setting Set [Pr. PA02] according to the option to be used. [Pr. PA02] Regenerative option selection 00: Regenerative option is not used. For servo amplifier of 100 W, regenerative resistor is not used. For servo amplifier of 0.2 kW to 7 kW, built-in regenerative resistor is used. - Page 343 11. OPTIONS AND AUXILIARY EQUIPMENT (1) MR-J4-500A(-RJ) or less/MR-J4-350A4(-RJ) or less Always remove the wiring from across P+ to D and fit the regenerative option across P+ to C. G3 and G4 are thermal sensor's terminals. Between G3 and G4 is opened when the regenerative option overheats abnormally.
- Page 344 11. OPTIONS AND AUXILIARY EQUIPMENT (2) MR-J4-500A4(-RJ)/MR-J4-700A(-RJ)/MR-J4-700A4(-RJ) Always remove the wiring (across P+ to C) of the servo amplifier built-in regenerative resistor and fit the regenerative option across P+ to C. G3 and G4 are thermal sensor's terminals. Between G3 and G4 is opened when the regenerative option overheats abnormally.
- Page 345 11. OPTIONS AND AUXILIARY EQUIPMENT (3) MR-J4-11KA(-RJ) to MR-J4-22KA(-RJ)/MR-J4-11KA4(-RJ) to MR-J4-22KA4(-RJ) (when using the supplied regenerative resistor) Note the followings for supplied regenerative resistors of 11 kW to 22 kW servo amplifiers because they do not have protect covers. Touching the resistor will cause a burn because the surface of the parts is a CAUTION resistive element and very high temperature.
- Page 346 11. OPTIONS AND AUXILIARY EQUIPMENT (4) MR-J4-11KA-PX to MR-J4-22KA-PX/MR-J4-11KA-RZ to MR-J4-22KA-RZ/MR-J4-11KA4-PX to MR-J4- 22KA4-PX/MR-J4-11KA4-RZ to MR-J4-22KA4-RZ (when using the regenerative option) The MR-J4-11KA-PX to MR-J4-22KA-PX, MR-J4-11KA-RZ to MR-J4-22KA-RZ, MR-J4-11KA4-PX to MR-J4-22KA4-PX, and MR-J4-11KA4-RZ to MR-J4-22KA4-RZ servo amplifiers are not supplied with regenerative resistors.
-
Page 347: Dimensions
11. OPTIONS AND AUXILIARY EQUIPMENT When using cooling fans, install them using the mounting holes provided in the bottom of the regenerative option. MR-RB5R/MR-RB9F/MR-RB9T/ MR-RB5K-4/MR-RB6K-4 Bottom Cooling fan × 2 (1.0 m /min or more, 92 mm × 92 mm) G4 G3 C Mounting screw 4-M3 11.2.5 Dimensions... - Page 348 11. OPTIONS AND AUXILIARY EQUIPMENT (2) MR-RB30/MR-RB31/MR-RB32/MR-RB3N/MR-RB34-4/MR-RB3M-4/MR-RB3G-4/MR-RB3U-4 [Unit: mm] Terminal block Cooling fan mounting screw (2-M4 screw) Terminal screw size: M4 Tightening torque: 1.2 [N•m] 101.5 82.5 Mounting screw Screw size: M5 Air intake Tightening torque: 5.4 [N•m] Mass: 2.9 [kg] (3) MR-RB50/MR-RB51/MR-RB5N/MR-RB54-4/MR-RB5G-4/MR-RB5U-4 [Unit: mm] Terminal block...
- Page 349 11. OPTIONS AND AUXILIARY EQUIPMENT (4) MR-RB032 [Unit: mm] TE1 terminal block 6 mounting hole Applicable wire size: 0.2 mm to 2.5 mm (AWG 24 to 12) Tightening torque: 0.5 to 0.6 [N•m] Mounting screw Screw size: M5 Tightening torque: 3.24 [N•m] Mass: 0.5 [kg] Approx.
- Page 350 11. OPTIONS AND AUXILIARY EQUIPMENT (6) MR-RB1H-4 [Unit: mm] Terminal φ6 mounting hole Applicable wire size: AWG 24 to 10 Tightening torque: 0.5 to 0.6 [N•m] Mounting screw Screw size: M5 Tightening torque: 3.24 [N•m] Mass: 1.1 [kg] Approx. 24 (7) GRZG400-0.8Ω/GRZG400-0.6Ω/GRZG400-0.5Ω/GRZG400-2.5Ω/GRZG400-2.0Ω...
-
Page 351: Fr-Bu2-(H) Brake Unit
11. OPTIONS AND AUXILIARY EQUIPMENT 11.3 FR-BU2-(H) Brake unit POINT Use a 200 V class brake unit and a resistor unit with a 200 V class servo amplifier, and a 400 V class brake unit and a resistor unit with a 400 V class servo amplifier. -
Page 352: Selection
11. OPTIONS AND AUXILIARY EQUIPMENT 11.3.1 Selection Use a combination of servo amplifier, brake unit and resistor unit listed below. Permissible Resultant Applicable servo Number of continuous resistance amplifier Brake unit Resistor unit connected power units [Ω] (Note 3) [kW] 200 V FR-BU2-15K FR-BR-15K... -
Page 353: Brake Unit Parameter Setting
11. OPTIONS AND AUXILIARY EQUIPMENT 11.3.2 Brake unit parameter setting Whether a parameter can be changed or not is listed below. Change Parameter Remarks possible/ Name impossible Brake mode switchover Impossible Do not change the parameter Monitor display data selection Possible Refer to the FR-BU2 Instruction Manual. -
Page 354: Connection Example
11. OPTIONS AND AUXILIARY EQUIPMENT 11.3.3 Connection example POINT EM2 has the same function as EM1 in the torque control mode. Connecting PR terminal of the brake unit to P+ terminal of the servo amplifier results in brake unit malfunction. Always connect the PR terminal of the brake unit to the PR terminal of the resistor unit. - Page 355 11. OPTIONS AND AUXILIARY EQUIPMENT 2) 400 V class Emergency stop switch Step-down transformer Servo amplifier (Note 9) 24 V DC (Note 12) MCCB (Note 1) DOCOM Power supply DOCOM (Note 11) FR-BR-H (Note 5) (Note 10) Main circuit power supply (Note 3) FR-BU2-H (Note 4)
- Page 356 11. OPTIONS AND AUXILIARY EQUIPMENT (b) When connecting two brake units to a servo amplifier POINT For 400 V class servo amplifiers, two brake units cannot be connected with one servo amplifier. To use brake units with a parallel connection, use two sets of FR-BU2 brake unit.
- Page 357 11. OPTIONS AND AUXILIARY EQUIPMENT Emergency stop switch Servo amplifier (Note 11) 24 V DC (Note 14) MCCB (Note 1) DOCOM Power supply DOCOM (Note 13) FR-BR (Note 5) (Note 12) (Note 3) Main circuit FR-BU2 power supply (Note 10) (Note 9) (Note 4) (Note 7)
- Page 358 11. OPTIONS AND AUXILIARY EQUIPMENT Note 1. For power supply specifications, refer to section 1.3. 2. For the servo amplifier of 7 kW, always disconnect the lead wire of built-in regenerative resistor, which is connected to the P+ and C terminals. For the servo amplifier of 11 kW to 22 kW, do not connect a supplied regenerative resistor to the P+ and C terminals.
- Page 359 11. OPTIONS AND AUXILIARY EQUIPMENT Note 1. For the power supply specifications, refer to section 1.3. 2. Do not connect a supplied regenerative resistor to the P+ and C terminals. 3. Between P3 and P4 is connected by default. When using the power factor improving DC reactor, remove the short bar between P3 and P4.
- Page 360 11. OPTIONS AND AUXILIARY EQUIPMENT (b) 400 V class Emergency stop switch Step-down transformer Servo amplifier (Note 8) 24 V DC (Note 11) MCCB (Note 1) DOCOM Power supply DOCOM (Note 10) MT-BR5-H (Note 4) (Note 9) Main circuit power supply (Note 2) FR-BU2-H (Note 3)
- Page 361 11. OPTIONS AND AUXILIARY EQUIPMENT (3) Connection instructions The cables between the servo amplifier and the brake unit, and between the resistor unit and the brake unit should be as short as possible. Always twist the cable longer than 5 m (twist five times or more per one meter).
- Page 362 11. OPTIONS AND AUXILIARY EQUIPMENT (4) Cables (a) Cables for the brake unit For the brake unit, HIV cable (600 V grade heat-resistant PVC insulated wire) is recommended. 1) Main circuit terminal Crimp Main Wire size terminal Tightening circuit torque Brake unit terminal N/-, P/+, PR,...
- Page 363 11. OPTIONS AND AUXILIARY EQUIPMENT (5) Crimp terminals for P+ and N- terminals of servo amplifier (a) Recommended crimp terminals POINT Always use recommended crimp terminals or equivalent since some crimp terminals cannot be installed depending on the size. (Note 1) Number of Servo amplifier Brake unit...
-
Page 364: Dimensions
11. OPTIONS AND AUXILIARY EQUIPMENT 11.3.4 Dimensions (1) FR-BU2-(H) Brake unit [Unit: mm] FR-BU2-15K φ5 hole5 hole (Screw size: M4) Rating plate 18.5 132.5 [Unit: mm] FR-BU2-30K/FR-BU2-H30K 2-φ5 hole (Screw size: M4) Rating plate 18.5 129.5 [Unit: mm] FR-BU2-55K/FR-BU2-H55K/FR-BU2-H75K 2-φ5 hole (Screw size: M4) Rating plate... - Page 365 11. OPTIONS AND AUXILIARY EQUIPMENT (2) FR-BR-(H) Resistor unit [Unit: mm] 2-φC (Note) Control circuit (Note) terminal Main circuit terminal Approx. 35 Approx. 35 W1 ± 1 W ± 5 Note. Ventilation ports are provided on both sides and the top. The bottom is open. Approximate Resistor unit mass [kg]...
-
Page 366: Fr-Rc-(H) Power Regeneration Converter
11. OPTIONS AND AUXILIARY EQUIPMENT 11.4 FR-RC-(H) power regeneration converter POINT When using the FR-RC-(H), power regeneration converter, set [Pr. PA04] to "0 0 _ _" to enable EM1 (Forced stop 1). When using the FR-RC-(H) power regeneration converter, refer to "Power Regeneration Converter FR-RC Instruction Manual (IB(NA)66330)". - Page 367 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Connection example POINT In this configuration, only the STO function is supported. The forced stop deceleration function is not available. (a) 200 V class Servo amplifier (Note 7) Power factor improving AC reactor MCCB (Note 10) (Note 5) Power...
- Page 368 11. OPTIONS AND AUXILIARY EQUIPMENT Note 1. When not using the phase detection terminals, fit the jumpers across RX-R, SX-S and TX-T. If the jumpers remain removed, the FR-RC will not operate. 2. For the servo amplifier of 7 kW, always disconnect the lead wire of built-in regenerative resistor, which is connected to the P+ and C terminals.
- Page 369 11. OPTIONS AND AUXILIARY EQUIPMENT (b) 400 V class Servo amplifier (Note 7) Power factor improving AC reactor MCCB (Note 10) (Note 5) Power supply (Note 9) 24 V DC Forced stop 1 DOCOM (Note 6) (Note 8) (Note 8) Servo-on Malfunction (Note 3)
- Page 370 11. OPTIONS AND AUXILIARY EQUIPMENT (3) Dimensions Mounting foot (removable) D hole Mounting foot (movable) Rating plate Display panel Front cover window Cooling fan Heat generation area outside mounting dimension [Unit: mm] Power regeneration Approximate converter mass [kg] FR-RC-15K FR-RC-30K FR-RC-55K FR-RC-H15K FR-RC-H30K...
- Page 371 11. OPTIONS AND AUXILIARY EQUIPMENT (4) Mounting hole machining dimensions When the power regeneration converter is installed to an enclosed type cabinet, mount the heat generating area of the converter outside the box to provide heat generation measures. At this time, the mounting hole having the following dimensions is machined in the box.
-
Page 372: Fr-Cv-(H) Power Regeneration Common Converter
11. OPTIONS AND AUXILIARY EQUIPMENT 11.5 FR-CV-(H) power regeneration common converter POINT For details of the power regeneration common converter FR-CV-(H), refer to the FR-CV Installation Guide (IB(NA)0600075). Do not supply power to the main circuit power supply terminals (L1, L2, and L3) of the servo amplifier. -
Page 373: Selection Example
11. OPTIONS AND AUXILIARY EQUIPMENT 11.5.2 Selection example (1) 200 V class FR-CV power regeneration common converter can be used for the 200 V class servo amplifier of 100 W to 22 kW. The following shows the restrictions on using the FR-CV. (a) Up to six servo amplifiers can be connected to one FR-CV. - Page 374 11. OPTIONS AND AUXILIARY EQUIPMENT (2) 400 V class FR-CV-H power regeneration common converter can be used for the servo amplifier of 11 kW to 22 kW. The following shows the restrictions on using the FR-CV-H. (a) Up to two servo amplifiers can be connected to one FR-CV-H. (b) FR-CV-H capacity [W] ≥...
- Page 375 11. OPTIONS AND AUXILIARY EQUIPMENT (3) Connection diagram POINT In this configuration, only the STO function is supported. The forced stop deceleration function is not available. (a) 200 V class Servo amplifier Servo motor FR-CVL FR-CV (Note 7) MCCB R/L11 R2/L12 R2/L1 3-phase...
- Page 376 11. OPTIONS AND AUXILIARY EQUIPMENT (b) 400 V class Servo amplifier Servo motor FR-CVL-H FR-CV-H (Note 7) MCCB R2/L12 R/L11 R2/L1 3-phase 380 V AC S2/L22 S/L21 S2/L2 480 V AC T/L31 T2/L32 T2/L3 P/L+ (Note 5) N/L- 24 V DC R/L11 24 V DC (Note 8) Step-down...
- Page 377 11. OPTIONS AND AUXILIARY EQUIPMENT (4) Selection example of wires used for wiring POINT Selection condition of wire size is as follows. Wire type: 600 V grade heat-resistant polyvinyl chloride insulated wire (HIV wire) Construction condition: Single wire set in midair (a) Wire sizes 1) Across P to P4, N to N The following table indicates the connection wire sizes of the DC power supply (P4, N- terminals)
- Page 378 11. OPTIONS AND AUXILIARY EQUIPMENT (b) Example of selecting the wire sizes 1) 200 V class When connecting multiple servo amplifiers, always use junction terminals for wiring the servo amplifier terminals P4, N-. Also, connect the servo amplifiers in the order of larger to smaller capacities.
- Page 379 11. OPTIONS AND AUXILIARY EQUIPMENT (5) Other precautions (a) When using the FR-CV-(H), always install the dedicated stand-alone reactor (FR-CVL-(H)). Do not use the power factor improving AC reactor (FR-HAL-(H)) or Power factor improving DC reactor (FR- HEL-(H)). (b) The inputs/outputs (main circuits) of the FR-CV-(H) and servo amplifiers include high-frequency components and may provide electromagnetic wave interference to communication equipment (such as AM radios) used near them.
- Page 380 11. OPTIONS AND AUXILIARY EQUIPMENT Power regeneration common converter FR-CV-H_ Item Total of connectable servo amplifier [kW] 27.5 capacities Maximum servo amplifier capacity [kW] Total of connectable servo motor rated currents Total capacity of applicable servo motors, 300% torque, 60 s Short-time rating Regenerative (Note 1)
-
Page 381: Junction Terminal Block Mr-Tb50
DICOM DOCOM (3) Dimensions [Unit: mm] MITSUBISHI MR-TB50 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 3133 35 37 39 41 43 45 47 49 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 46.5... - Page 382 11. OPTIONS AND AUXILIARY EQUIPMENT (4) Junction terminal block cable MR-J2M-CN1TBL_M (a) Model explanations Model: Symbol Cable length [m] (b) Connection diagram 10150-6000EL(Servo amplifier side) D7650-B500FL(Junction terminal side) Signal symbol Pin No. Pin No. Position Speed Torque P15R P15R P15R DICOM DICOM DICOM...
-
Page 383: Mr Configurator2
11. OPTIONS AND AUXILIARY EQUIPMENT 11.7 MR Configurator2 POINT MR-J4-_A_-RJ servo amplifier is supported with software version 1.19V or later. MR Configurator2 (SW1DNC-MRC2-E) uses the communication function of the servo amplifier to perform parameter setting changes, graph display, test operation, etc. on a personal computer. 11.7.1 Specifications Item Description... -
Page 384: System Configuration
11. OPTIONS AND AUXILIARY EQUIPMENT 11.7.2 System configuration (1) Components To use this software, the following components are required in addition to the servo amplifier and servo motor. Equipment (Note 1) Description ® ® Microsoft Windows 8 Enterprise Operating System ®... -
Page 385: Precautions For Using Usb Communication Function
11. OPTIONS AND AUXILIARY EQUIPMENT (2) Connection with servo amplifier Personal computer Servo amplifier USB cable To USB MR-J3USBCBL3M connector (Option) 11.7.3 Precautions for using USB communication function Note the following to prevent an electric shock and malfunction of the servo amplifier. (1) Power connection of personal computers Connect your personal computer with the following procedures. -
Page 386: Battery
11. OPTIONS AND AUXILIARY EQUIPMENT 11.8 Battery POINT Refer to appendix 2 and 3 for battery transportation and the new EU Battery Directive. The MR-BAT6V1BJ battery for junction battery cable is only for the HG series servo motors. It cannot be used with direct drive motors. Do not use the MR-BAT6V1BJ battery for junction battery cable in the fully closed loop system. -
Page 387: Selection Example Of Wires
11. OPTIONS AND AUXILIARY EQUIPMENT (3) DIMENSIONS [Unit: mm] 34.8 69.3 Rating plate Mass: 66 [g] 11.9 Selection example of wires POINT To comply with the IEC/EN/UL/CSA standard, use the wires shown in appendix 4 for wiring. To comply with other standards, use a wire that is complied with each standard. - Page 388 Table 11.1 Wire size selection example 1 (HIV wire) Wire [mm ] (Note 1) Servo amplifier 4) U/V/W/ 1) L1/L2/L3/ 2) L11/L21 3) P+/C (Note 3) MR-J4-10A(-RJ) MR-J4-20A(-RJ) MR-J4-40A(-RJ) AWG 18 to 14 1.25 to 2 (Note 4) MR-J4-60A(-RJ) 2 (AWG 14) (AWG 16 to 14)
- Page 389 11. OPTIONS AND AUXILIARY EQUIPMENT (b) 400 V class Table 11.2 Wire size selection example (HIV wire) Wires [mm ] (Note 1) Servo amplifier 4) U/V/W/ 2) L11/L21 3) P+/C 1) L1/L2/L3/ (Note 3) MR-J4-60A4(-RJ) 1.25 to 2 MR-J4-100A4(-RJ) 2 (AWG 14) (AWG 16 to 14) 2 (AWG14) AWG 16 to 14...
- Page 390 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Selection example of crimp terminals (a) 200 V class Servo amplifier-side crimp terminals Symbol Applicable tool (Note 2) Manufacturer Crimp terminal Body Head Dice FVD5.5-4 YNT-1210S b (Note 1) 8-4NS YHT-8S FVD2-4 YNT-1614 FVD2-M3 FVD1.25-M3 YNT-2216 DH-122...
-
Page 391: Molded-Case Circuit Breakers, Fuses, Magnetic Contactors (Recommended)
Class Current [A] (Note 2) improving reactor is improving reactor is not used used MR-J4-10A(-RJ) 30 A frame 5 A 30 A frame 5 A MR-J4-20A(-RJ) 30 A frame 5 A 30 A frame 5 A MR-J4-40A(-RJ) 30 A frame 10 A... - Page 392 Molded-case circuit breaker (Note) Fuse (Class T) Fuse (Class K5) Servo amplifier Frame, rated current Voltage AC [V] Current [A] Voltage AC [V] Current [A] Voltage AC [V] MR-J4-10A(-RJ) MR-J4-20A(-RJ) MR-J4-40A(-RJ) MR-J4-60A(-RJ) MR-J4-70A(-RJ) MR-J4-100A(-RJ) MR-J4-200A(-RJ) 30 A frame 5 A MR-J4-350A(-RJ) MR-J4-500A(-RJ)
-
Page 393: Power Factor Improving Dc Reactors
11. OPTIONS AND AUXILIARY EQUIPMENT 11.11 Power factor improving DC reactors The following shows the advantages of using power factor improving DC reactor. It improves the power factor by increasing the form factor of the servo amplifier's input current. It decreases the power supply capacity. The input power factor is improved to be about 85%. - Page 394 11. OPTIONS AND AUXILIARY EQUIPMENT Power factor Dimensions [mm] Terminal Mass Wire [mm Servo amplifier improving DC Dimensions size [kg] (Note 2) reactor (Note 1) MR-J4-10A(-RJ) FR-HEL-0.4K MR-J4-20A(-RJ) MR-J4-40A(-RJ) FR-HEL-0.75K Fig. 11.1 2 (AWG 14) MR-J4-60A(-RJ) FR-HEL-1.5K MR-J4-70A(-RJ) MR-J4-100A(-RJ) FR-HEL-2.2K MR-J4-200A(-RJ) FR-HEL-3.7K MR-J4-350A(-RJ) FR-HEL-7.5K...
- Page 395 11. OPTIONS AND AUXILIARY EQUIPMENT (2) 400 V class 4-d mounting hole (Note 1) 4-d mounting hole (Note 1) D or less D or less (D3) (D3) P P1 P P1 W ± 2.5 D1 ± 1 W ± 2.5 D1 ±...
- Page 396 11. OPTIONS AND AUXILIARY EQUIPMENT Power factor Dimensions [mm] Terminal Mass Wire [mm Servo amplifier Dimensions improving DC size [kg] (Note) reactor MR-J4-60A4(-RJ) FR-HEL-H1.5K M3.5 2 (AWG 14) Fig. 11.4 MR-J4-100A4(-RJ) FR-HEL-H2.2K M3.5 2 (AWG 14) MR-J4-200A4(-RJ) FR-HEL-H3.7K 2 (AWG 14) MR-J4-350A4(-RJ) FR-HEL-H7.5K Fig.
-
Page 397: Power Factor Improving Ac Reactors
11. OPTIONS AND AUXILIARY EQUIPMENT 11.12 Power factor improving AC reactors The following shows the advantages of using power factor improving AC reactor. It improves the power factor by increasing the form factor of the servo amplifier's input current. It decreases the power supply capacity. The input power factor is improved to be about 80%. - Page 398 11. OPTIONS AND AUXILIARY EQUIPMENT Power factor Dimensions [mm] Mass Terminal Servo amplifier improving AC Dimensions size [kg] D (Note) reactor MR-J4-10A(-RJ) FR-HAL-0.4K MR-J4-20A(-RJ) MR-J4-40A(-RJ) FR-HAL-0.75K MR-J4-60A(-RJ) FR-HAL-1.5K Fig. 11.7 MR-J4-70A(-RJ) MR-J4-100A(-RJ) FR-HAL-2.2K (Note) MR-J4-200A(-RJ) FR-HAL-3.7K (Note) MR-J4-350A(-RJ) FR-HAL-7.5K MR-J4-500A(-RJ)
- Page 399 11. OPTIONS AND AUXILIARY EQUIPMENT (2) 400 V class 4-d mounting hole (Note) (φ5 groove) S Y T D or less Servo amplifier 3-phase 400 V class FR-HAL-H MCCB 3-phase 380 V AC to 480 V AC W ± 0.5 Fig.
-
Page 400: Relays (Recommended)
11. OPTIONS AND AUXILIARY EQUIPMENT Dimensions [mm] Power factor Mass Terminal Servo amplifier improving AC Dimensions size [kg] reactor (Note) MR-J4-60A4(-RJ) FR-HAL-H1.5K 59.6 M3.5 MR-J4-100A4(-RJ) FR-HAL-H2.2K Fig. 11.10 59.6 M3.5 MR-J4-200A4(-RJ) FR-HAL-H3.7K 70.6 M3.5 MR-J4-350A4(-RJ) FR-HAL-H7.5K MR-J4-500A4(-RJ) FR-HAL-H11K Fig. 11.11 MR-J4-700A4(-RJ) FR-HAL-H15K MR-J4-11KA4(-RJ) -
Page 401: Noise Reduction Techniques
11. OPTIONS AND AUXILIARY EQUIPMENT 11.14 Noise reduction techniques Noises are classified into external noises which enter the servo amplifier to cause it to malfunction and those radiated by the servo amplifier to cause peripheral devices to malfunction. Since the servo amplifier is an electronic device which handles small signals, the following general noise reduction techniques are required. - Page 402 11. OPTIONS AND AUXILIARY EQUIPMENT Sensor power supply Servo amplifier Instrument Receiver Sensor Servo motor Noise transmission Suppression techniques route When measuring instruments, receivers, sensors, etc. which handle weak signals and may malfunction due to noise and/or their signal cables are contained in a cabinet together with the servo amplifier or run near the servo amplifier, such devices may malfunction due to noises transmitted through the air.
- Page 403 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Noise reduction techniques (a) Data line filter (recommended) Noise can be prevented by installing a data line filter onto the encoder cable, etc. For example, ZCAT3035-1330 by TDK, ESD-SR-250 by NEC TOKIN, GRFC-13 by Kitagawa Industries, and E04SRM563218 by SEIWA ELECTRIC are available as data line filters.
- Page 404 11. OPTIONS AND AUXILIARY EQUIPMENT (c) Cable clamp fitting AERSBAN-_SET Generally, the grounding of the shielded wire may only be connected to the connector's SD terminal. However, the effect can be increased by directly connecting the cable to an grounding plate as shown below.
- Page 405 11. OPTIONS AND AUXILIARY EQUIPMENT (d) Line noise filter (FR-BSF01/ FR-BLF) This filter is effective in suppressing noises radiated from the power supply side and output side of the servo amplifier and also in suppressing high-frequency leakage current (0-phase current). It especially affects the noises between 0.5 MHz and 5 MHz band.
- Page 406 11. OPTIONS AND AUXILIARY EQUIPMENT (e) Radio noise filter (FR-BIF-(H)) This filter is effective in suppressing noises radiated from the power supply side of the servo amplifier especially in 10 MHz and lower radio frequency bands. The FR-BIF is designed for the input only.
- Page 407 11. OPTIONS AND AUXILIARY EQUIPMENT (f) Varistor for input power supply (recommended) Varistors are effective to prevent exogenous noise and lightning surge from entering the servo amplifier. When using a varistor, connect it between each phase of the input power supply of the equipment.
-
Page 408: Earth-Leakage Current Breaker
To minimize leakage currents, make the input and output cables as short as possible, and make the grounding cable longer than 30 cm. Rated sensitivity current ≥ 10 • {Ig1 + Ign + Iga + K • (Ig2 + Igm)} [mA]………(11.1) Earth-leakage current breaker Cable Mitsubishi Noise filter Type products Cable... - Page 409 Leakage current [mA] 0.1 to 0.6 0.75 to 3.5 0.15 11/15 Table 11.6 Earth-leakage current breaker selection example Rated sensitivity current of earth- Servo amplifier leakage current breaker [mA] MR-J4-10A(-RJ) to MR-J4-350A(-RJ) MR-J4-60A4(-RJ) to MR-J4-350A4(-RJ) MR-J4-500A(-RJ) MR-J4-500A4(-RJ) MR-J4-700A(-RJ) MR-J4-700A4(-RJ) MR-J4-11KA(-RJ) to...
- Page 410 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Selection example Indicated below is an example of selecting an earth-leakage current breaker under the following conditions. 2 mm × 5 m 2 mm × 5 m Servo motor Servo amplifier MR-J4-40A HG-KR43 Use an earth-leakage current breaker designed for suppressing harmonics/surges. Find the terms of equation (11.1) from the diagram.
-
Page 411: Emc Filter (Recommended)
Some EMC filters have large in leakage current. (1) Combination with the servo amplifier Recommended filter (Soshin Electric) Servo amplifier Mass [kg] Rated voltage Leakage current Model Rated current [A] [V AC] [mA] MR-J4-10A(-RJ) to (Note) MR-J4-100A(-RJ) HF3010A-UN MR-J4-200A(-RJ) (Note) MR-J4-350A(-RJ) HF3030A-UN MR-J4-500A(-RJ) (Note) MR-J4-700A(-RJ) - Page 412 11. OPTIONS AND AUXILIARY EQUIPMENT (3) Dimensions (a) EMC filter HF3010A-UN [Unit: mm] 3-M4 4-5.5 × 7 3-M4 Approx. 41 258 ± 4 65 ± 4 273 ± 2 288 ± 4 300 ± 5 HF3030A-UN/HF-3040A-UN [Unit: mm] 6-R3.25 length: 8 3-M5 3-M5 70 ±...
- Page 413 11. OPTIONS AND AUXILIARY EQUIPMENT HF3100A-UN [Unit: mm] 2-φ 6.5 2-6.5 × 8 380 ± 1 400 ± 5 TF3005C-TX/TX3020C-TX/TF3030C-TX [Unit: mm] 6-R3.25 length: 8 3-M4 3-M4 ± ± Approx.6.75 ± ± ± 2 Approx. 160 ± ± ± 11 - 82...
- Page 414 11. OPTIONS AND AUXILIARY EQUIPMENT TF3040C-TX/TF3060C-TX [Unit: mm] 8-R3.25 Length 8 (for M6) 3-M6 3-M6 Approx. 91.5 100 ± 1 100 ± 1 100 ± 1 390 ± 2 180 ± 2 Approx. 190 412 ± 5 438 ± 5 200 ±...
-
Page 415: External Dynamic Brake
11. OPTIONS AND AUXILIARY EQUIPMENT 11.17 External dynamic brake Use an external dynamic brake for a servo amplifier of MR-J4-11KA(-RJ) to MR- J4-22KA(-RJ) and MR-J4-11KA4(-RJ) to MRJ4-22KA4(-RJ). Failure to do so will cause an accident because the servo motor does not stop immediately but coasts CAUTION at an alarm occurrence for which the servo motor does not decelerate to stop. - Page 416 11. OPTIONS AND AUXILIARY EQUIPMENT (2) Connection example (a) 200 V class Operation ready Servo amplifier Servo motor EMG stop switch (Note 3) MCCB (Note 2) Power supply 24 V DC (Note 5) DOCOM DOCOM (Note 6) (Note 1) (Note 4) Main circuit power supply DICOM...
- Page 417 11. OPTIONS AND AUXILIARY EQUIPMENT (b) 400 V class Operation ready Servo amplifier Servo motor Emergency stop switch (Note 7) Step-down (Note 3) transformer MCCB (Note 2) Power supply 24 V DC (Note 5) DOCOM DOCOM (Note 6) (Note 1) (Note 4) Main circuit power supply...
- Page 418 11. OPTIONS AND AUXILIARY EQUIPMENT (3) Timing chart Coasting Coasting Servo motor speed Dynamic brake Dynamic brake Present Alarm Absent Base circuit DB (Dynamic brake interlock) Invalid Dynamic brake Valid Short EMG stop switch Open a. Timing chart at alarm occurrence b.
- Page 419 11. OPTIONS AND AUXILIARY EQUIPMENT (4) Dimensions (a) DBU-11K/DBU-15K/DBU-22K-R1 [Unit: mm] Terminal block Screw: M4 Screw: M3.5 Tightening torque: 1.2 [N•m] Tightening torque: 0.8 [N•m] Mass (Note) Connection wire [mm External dynamic brake [kg] U/V/W Except U/V/W DBU-11K 163.5 5.5 (AWG 10) 2 (AWG 14) DBU-15K/DBU-22K-R1 5.5 (AWG 10)
- Page 420 11. OPTIONS AND AUXILIARY EQUIPMENT (b) DBU-11K-4/DBU-22K-4 [Unit: mm] 2-φ7 mounting hole 73.75 Mass: 6.7 [kg] Terminal block Screw: M3.5 Screw: M4 Tightening torque: 0.8 [N•m] Tightening torque: 1.2 [N•m] (Note) Connection wire [mm External dynamic brake U/V/W Except U/V/W DBU-11K-4 5.5 (AWG 10) 2 (AWG 14)
-
Page 421: Heat Sink Outside Mounting Attachment (Mr-J4Acn15K/Mr-J3Acn)
11. OPTIONS AND AUXILIARY EQUIPMENT 11.18 Heat sink outside mounting attachment (MR-J4ACN15K/MR-J3ACN) Use the heat sink outside mounting attachment to mount the heat generation area of the servo amplifier in the outside of the cabinet to dissipate servo amplifier-generated heat to the outside of the cabinet and reduce the amount of heat generated in the cabinet. - Page 422 11. OPTIONS AND AUXILIARY EQUIPMENT (c) Mounting method Attachment Servo amplifier Fit using the assembling screws. Attachment a. Assembling the heat sink outside mounting attachment Punched hole Cabinet Servo amplifier b. Mounting it to inside cabinet 11 - 91...
- Page 423 11. OPTIONS AND AUXILIARY EQUIPMENT (d) Mounting dimensional diagram [Unit: mm] 20.6 Panel Attachment Servo amplifier Servo amplifier Panel 108.3 Mounting hole Approx. 263.3 (2) MR-J3ACN (a) Panel cut dimensions [Unit: mm] [Unit : mm] 4-M10 Screw Punched hole 11 - 92...
- Page 424 11. OPTIONS AND AUXILIARY EQUIPMENT (b) How to assemble the attachment for heat sink outside mounting attachment Attachment Screw (2 places) (c) Mounting method Attachment Punched hole Servo amplifier Servo Fit using the amplifier assembling Cabinet screws. Attachment a. Assembling the heat sink outside mounting b.
- Page 425 11. OPTIONS AND AUXILIARY EQUIPMENT (d) Mounting dimensional diagram [Unit: mm] Panel Servo amplifier Attachment Servo amplifier Panel Approx. 11.5 Mounting Approx. 260 hole Approx. 260 11 - 94...
-
Page 426: Absolute Position Detection System
12. ABSOLUTE POSITION DETECTION SYSTEM 12. ABSOLUTE POSITION DETECTION SYSTEM If [AL. 25 Absolute position erased] or [AL. E3 Absolute position counter warning] has occurred, always perform home position setting again. Otherwise, it may cause an unexpected operation. Refer to appendix 2 and 3 for battery transportation and the new EU Battery CAUTION Directive. -
Page 427: Restrictions
12. ABSOLUTE POSITION DETECTION SYSTEM 12.1.2 Restrictions The system cannot be configured under the following conditions. Additionally, test operation cannot be performed in the absolute position detection system. To perform test operation, select incremental system in [Pr. PA03]. (1) Speed control mode and torque control mode (2) Control switch-over mode (position/speed, speed/torque, and torque/position) (3) Stroke-less coordinate system, e.g. -
Page 428: Parameter Setting
12. ABSOLUTE POSITION DETECTION SYSTEM 12.1.4 Parameter setting POINT Set "_ _ _ 2" in [Pr. PA03] when using the absolute position detection system by communication. This parameter setting is supported by servo amplifier with software version A3 or later. Set "_ _ _ 1"... -
Page 429: Battery
12. ABSOLUTE POSITION DETECTION SYSTEM 12.2 Battery 12.2.1 Using MR-BAT6V1SET battery (1) Configuration diagram General purpose Servo amplifier programmable controller Pulse train Positioning module command Home position data Current EEP-ROM memory position Current position Backed up in the I/O module case of power failure Input... - Page 430 12. ABSOLUTE POSITION DETECTION SYSTEM (2) Specifications (a) Specification list Item Description System Electronic battery backup type Battery Model MR-BAT6V1SET Battery pack 2CR17335A (primary lithium battery) Nominal voltage Nominal capacity [mAh] 1650 Storage temperature [°C] 0 to 55 Operating temperature [°C] 0 to 55 Amount of lithium metal...
- Page 431 12. ABSOLUTE POSITION DETECTION SYSTEM (3) Battery replacement procedure Before replacing a battery, turn off the main circuit power and wait for 15 minutes or longer until the charge lamp turns off. Then, check the voltage between P+ and WARNING N- with a voltage tester or others.
- Page 432 12. ABSOLUTE POSITION DETECTION SYSTEM (a) Battery installation and removal procedure 1) Installation procedure POINT For the servo amplifier with a battery holder on the bottom, it is not possible to wire for the earth with the battery installed. Insert the battery after executing the earth wiring of the servo amplifier.
- Page 433 12. ABSOLUTE POSITION DETECTION SYSTEM (b) Replacement procedure of the battery in the MR-BAT6V1SET When the MR-BAT6V1SET battery reaches the end of its life, replace the MR-BAT6V1 battery in the MR-BAT6V1SET. While pressing the locking part, open the cover. Cover Locking part Replace the battery with a new MR-BAT6V1 battery.
-
Page 434: Using Mr-Bat6V1Bj Battery For Junction Battery Cable
12. ABSOLUTE POSITION DETECTION SYSTEM 12.2.2 Using MR-BAT6V1BJ battery for junction battery cable (1) Configuration diagram General purpose Servo amplifier programmable controller Pulse train Positioning module command Home position data Current EEP-ROM memory position Current position Backed up in the I/O module case of power failure... - Page 435 12. ABSOLUTE POSITION DETECTION SYSTEM (b) Battery mounting POINT Even if the connector for branch cable connection (black) is not connected to the MR-BT6VCBL03M junction battery cable, an alarm will not occur. Check that they are connected securely. When you transport a servo amplifier and machine apart, disconnect only CN2 and CN4 of the servo amplifier.
- Page 436 12. ABSOLUTE POSITION DETECTION SYSTEM The MR-BAT6V1BJ battery for junction battery cable can be replaced with the control circuit power supply off. (a) Battery installation and removal procedure The battery installation and removal procedure to the servo amplifier are the same as for the MR- BAT6V1SET battery.
- Page 437 12. ABSOLUTE POSITION DETECTION SYSTEM 3) Disconnect the connector for servo amplifier connection (orange) of the old MR-BAT6V1BJ battery for junction battery cable. When the control circuit power supply is on, performing 3) without [AL. 9F.1 Low battery] will trigger [AL. 9F.1]. Servo amplifier MR-BT6VCBL03M Old MR-BAT6V1BJ...
-
Page 438: Standard Connection Example
12. ABSOLUTE POSITION DETECTION SYSTEM 12.3 Standard connection example Servo amplifier 24 V DC DICOM DOCOM (Note) Stroke end in forward rotation Stroke end in reverse rotation External torque limit selection Reset DOCOM Output Forced stop 2 Electromagnetic Servo-on brake output ABS transmission mode ABSM... -
Page 439: Signal Explanation
12. ABSOLUTE POSITION DETECTION SYSTEM 12.4 Signal explanation When the absolute position data is transferred, the signals of connector CN1 change as described in this section. They return to the previous status on completion of data transfer. The other signals are as described in section 3.5. -
Page 440: Startup Procedure
12. ABSOLUTE POSITION DETECTION SYSTEM 12.5 Startup procedure (1) Battery installation. Refer to section 12.2. (2) Parameter setting Set "_ _ _ 1" in [Pr. PA03] of the servo amplifier and switch power off, then on. (3) Resetting of [AL. 25 Absolute position erased] After connecting the encoder cable, [AL. -
Page 441: Absolute Position Data Transfer Protocol
12. ABSOLUTE POSITION DETECTION SYSTEM 12.6 Absolute position data transfer protocol POINT After switching on ABSM, turn on SON. When the ABS transfer mode is off, turning on SON does not switch on the base circuit. 12.6.1 Data transfer procedure Each time SON is turned on (when the power is switched on for example), the programmable controller reads the position data (present position) of the servo amplifier. -
Page 442: Transfer Method
12. ABSOLUTE POSITION DETECTION SYSTEM 12.6.2 Transfer method The following shows a sequence how to turn on the base circuit while it is off state because SON is off, EM2 is off, or an alarm is occurring. In the absolute position detection system, every time SON is turned on, ABSM should always be turned on to read the current position in the servo amplifier to the controller. - Page 443 12. ABSOLUTE POSITION DETECTION SYSTEM 1) After the absolute position data is transmitted, RD turns on by ABSM-off. When RD is on, ABSM- on is not received. 2) Even if SON is turned on before ABSM is turned on, the base circuit is not turned on until ABSM is turned on.
- Page 444 12. ABSOLUTE POSITION DETECTION SYSTEM 1) The programmable controller turns on ABSM and SON at the leading edge of the internal servo- 2) In response to ABS transfer mode, the servo detects and calculates the absolute position and turns on ABST to notify the programmable controller that the servo is ready for data transmission. 3) After acknowledging that ABST is turned on, the programmable controller will turn on ABSR.
- Page 445 12. ABSOLUTE POSITION DETECTION SYSTEM (2) Transmission error (a) [AL. E5 ABS time-out warning] In the ABS transfer mode, the servo amplifier processes time-out below, and displays [AL. E5] when a time-out error occurs. [AL. E5 ABS time-out warning] is cleared when ABSM changes from off to on. 1) ABS request off-time time-out check (applied to 32-bit absolute position data in 2-bit units checksum) If the ABS request signal is not turned on by the programmable controller within 5 s after ABST is...
- Page 446 12. ABSOLUTE POSITION DETECTION SYSTEM 3) ABS transfer mode finish-time time-out check If ABSM is not turned off within 5 s after the last ABS transmission data ready (19th signal for absolute position data transmission) is turned on, it is regarded as the transmission error and the [AL.
- Page 447 12. ABSOLUTE POSITION DETECTION SYSTEM 5) SON off, RES on,and EM2 off check during the ABS transfer When the ABS transfer mode is turned on to start transferring and then SON is turned off, RES is turned on, or EM2 is turned on before the 19th ABST is turned on, [AL. E5 ABS time-out warning] occurs, regarding it as a transfer error.
- Page 448 12. ABSOLUTE POSITION DETECTION SYSTEM (3) At the time of alarm reset If an alarm occurs, turn off SON by detecting ALM. If an alarm has occurred, ABSM cannot be accepted. In the reset state, ABSM can be input. ABSM During transfer of ABS ABSR ABST...
- Page 449 12. ABSOLUTE POSITION DETECTION SYSTEM (4) At the time of forced stop reset (a) If the power is switched on in the forced stop state he forced stop state can be reset while the absolute position data is being transferred. If the forced stop state is reset while the absolute position data is transmitted, the base circuit is turned on 95 ms after resetting.
- Page 450 12. ABSOLUTE POSITION DETECTION SYSTEM (b) If forced stop is activated during servo-on ABSM is permissible while in the forced stop state. In this case, the base circuit and RD are turned on after the forced stop state is reset. ABSM During transfer of ABS ABSR...
-
Page 451: Home Position Setting
12. ABSOLUTE POSITION DETECTION SYSTEM 12.6.3 Home position setting (1) Dog type home position return Preset a home position return creep speed at which the machine will not be given impact. On detection of a zero pulse, CR is turned from off to on. At the same time, the servo amplifier clears the droop pulses, comes to a sudden stop, and stores the stop position into the non-volatile memory as the home position absolute position data. - Page 452 12. ABSOLUTE POSITION DETECTION SYSTEM (2) Data set type home position return POINT Never make home position setting during command operation or servo motor rotation. It may cause home position sift. It is possible to execute data set type home position return during the servo off. Move the machine to the position where the home position is to be set by performing manual operation such as JOG operation.
-
Page 453: Use Of Servo Motor With An Electromagnetic Brake
12. ABSOLUTE POSITION DETECTION SYSTEM 12.6.4 Use of servo motor with an electromagnetic brake The timing charts at power on/off and SON on/off are given below. Preset [Pr. PD03] to [Pr. PD22] of the servo amplifier to enable MBR. When MBR is set for the CN1-23 pin, turning ABSM on will change the CN1-23 pin to ABSB1 (ABS transmission data bit 1). -
Page 454: How To Process The Absolute Position Data At Detection Of Stroke End
12. ABSOLUTE POSITION DETECTION SYSTEM 12.6.5 How to process the absolute position data at detection of stroke end The servo amplifier stops the acceptance of the command pulse when off of LSP or LSN are detected, clears the droop pulses to 0 at the same time, and stops the servo motor. At this time, the programmable controller keeps outputting the command pulse. - Page 455 12. ABSOLUTE POSITION DETECTION SYSTEM (1) The off period of the ABS transmission data ready signal output from the servo amplifier is checked. If the off period is 1 s or longer, regard as a transfer fault and generate the ABS communication error. Generate the ABS communication error if [AL.
- Page 456 12. ABSOLUTE POSITION DETECTION SYSTEM (3) The time required for the ABS request signal to go off after it has been turned on (ABS transfer time) is checked. To detect [AL. E5 ABS time-out warning] at the servo amplifier. If the ABS request remains on for longer than 1 s, regard that a fault relating to the ABS request signal or the ABST has occurred and generate the ABS communication error.
-
Page 457: Communication-Based Absolute Position Transfer System
12. ABSOLUTE POSITION DETECTION SYSTEM 12.8 Communication-based absolute position transfer system 12.8.1 Serial communication command The following commands are available for reading absolute position data using the serial communication function. When reading data, take care to specify the correct station number of the servo amplifier from where the data will be read. - Page 458 12. ABSOLUTE POSITION DETECTION SYSTEM (2) Transfer method The following shows a sequence how to turn on the base circuit while it is off state because SON is off, EM2 is off, or an alarm is occurring. In the absolute position detection system, always give the serial communication command to read the current position in the servo amplifier to the controller every time RD turns on.
- Page 459 12. ABSOLUTE POSITION DETECTION SYSTEM (c) At the time of alarm reset If an alarm has occurred, detect ALM and turn off SON. After removing the alarm occurrence factor and deactivating the alarm, get the absolute position data again from the servo amplifier in accordance with the procedure in (a) of this section.
- Page 460 12. ABSOLUTE POSITION DETECTION SYSTEM (d) At the time of forced stop reset 210 ms after the forced stop is deactivated, the base circuit turns on, and RD turns on further 5 ms after that, turns on. Always get the current position data using RD as the trigger before the position command is issued.
- Page 461 12. ABSOLUTE POSITION DETECTION SYSTEM MEMO 12 - 36...
-
Page 462: Using Sto Function
13. USING STO FUNCTION 13. USING STO FUNCTION POINT In the torque control mode, the forced stop deceleration function is not available. 13.1 Introduction This section provides the cautions of the STO function. 13.1.1 Summary This servo amplifier complies with the following safety standards. ISO/EN ISO 13849-1 category 3 PL d IEC 61508 SIL 2 IEC/EN 61800-5-2 SIL 2... -
Page 463: Residual Risks Of The Sto Function
13.1.4 Residual risks of the STO function Machine manufacturers are responsible for all risk evaluations and all associated residual risks. Below are residual risks associated with the STO function. Mitsubishi is not liable for any damages or injuries caused by these risks. -
Page 464: Specifications
13. USING STO FUNCTION 13.1.5 Specifications (1) Specifications Item Specifications Functional safety STO (IEC/EN 61800-5-2) ISO/EN ISO 13849-1 category 3 PL d, IEC 61508 SIL 2, Safety performance EN 62061 SIL CL2, EN 61800-5-2 SIL 2 Mean time to dangerous failure 100 years or more (Note) (MTTFd) Diagnostic converge (DC) -
Page 465: Maintenance
13. USING STO FUNCTION 13.1.6 Maintenance This servo amplifier has alarms and warnings for maintenance that supports the Mitsubishi drive safety function. (Refer to chapter 8.) 13.2 STO I/O signal connector (CN8) and signal layouts 13.2.1 Signal layouts POINT The pin configurations of the connectors are as viewed from the cable connector wiring section. -
Page 466: Signal (Device) Explanations
13. USING STO FUNCTION 13.2.2 Signal (device) explanations (1) I/O device Connector Signal name Description pin No. division STOCOM CN8-3 Common terminal for input signal of STO1 and STO2 DI-1 STO1 CN8-4 Inputs STO state 1. DI-1 STO state (base shut-off): Open between STO1 and STOCOM. STO release state (in driving): Close between STO1 and STOCOM. -
Page 467: Connection Example
13. USING STO FUNCTION 13.3 Connection example POINT Turn off STO (STO1 and STO2) after the servo motor stops by the servo off state or with forced stop deceleration by turning off EM2 (Forced stop 2). Configure an external sequence that has the timings shown as below using an external device such as the MR-J3-D05 safety logic unit. -
Page 468: External I/O Signal Connection Example Using An Mr-J3-D05 Safety Logic Unit
13. USING STO FUNCTION 13.3.2 External I/O signal connection example using an MR-J3-D05 safety logic unit POINT This connection is for source interface. For the other I/O signals, refer to the connection examples in section 3.2. (1) Connection example 24 V RESA RESB MR-J3-D05... - Page 469 13. USING STO FUNCTION (2) Basic operation example The switch status of STOA is input to SDI2A+ of MR-J3-D05, and then it will be input to STO1 and STO2 of the servo amplifier via SDO1A and SDO2A of MR-J3-D05. The switch status of STOB is input to SDI2B+ of MR-J3-D05, and then it will be input to STO1 and STO2 of the servo amplifier via SDO1B and SDO2B of MR-J3-D05.
-
Page 470: External I/O Signal Connection Example Using An External Safety Relay Unit
13. USING STO FUNCTION 13.3.3 External I/O signal connection example using an external safety relay unit POINT This connection is for source interface. For the other I/O signals, refer to the connection examples in section 3.2. This connection example complies with the requirement of ISO/EN ISO 13849-1 category 3 PL d. For details, refer to the safety relay module user’s manual. -
Page 471: Detailed Description Of Interfaces
13. USING STO FUNCTION 13.4 Detailed description of interfaces This section provides the details of the I/O signal interfaces (refer to the I/O division in the table) given in section 13.2. Refer to this section and make connection with the external device. 13.4.1 Sink I/O interface (1) Digital input interface DI-1 This is an input circuit whose photocoupler cathode side is input terminal. -
Page 472: Source I/O Interface
13. USING STO FUNCTION (b) When outputting two STO states by using one TOFB Servo amplifier If polarity of diode is reversed, servo amplifier TOFB1 Load will malfunction. TOFCOM (Note) 24 V DC ± 10% 500 mA TOFB2 Note. If the voltage drop (maximum of 5.2 V) interferes with the relay operation, apply high voltage (maximum of 26.4 V) from external source. - Page 473 13. USING STO FUNCTION (b) When outputting two STO states by using one TOFB Servo amplifier If polarity of diode is reversed, servo amplifier TOFB1 Load will malfunction. TOFCOM (Note) 24 V DC ± 10% 500 mA TOFB2 Note. If the voltage drop (maximum of 5.2 V) interferes with the relay operation, apply high voltage (maximum of 26.4 V) from external source.
-
Page 474: Communication Function
14. COMMUNICATION FUNCTION 14. COMMUNICATION FUNCTION POINT RS-422 serial communication function is supported by servo amplifier with software version A3 or later. The USB communication function (CN5 connector) and the RS-422 communication function (CN3 connector) are mutually exclusive functions. They cannot be used together. - Page 475 14. COMMUNICATION FUNCTION (b) Cable connection diagram Wire the cables as follows. (Note 3) 30 m or less (Note 1) (Note 1, 7) The second axis servo amplifier The n axis servo amplifier Connector for CN3 Connector for CN3 (RJ45 Connector) (RJ45 Connector) (Note 4, 5) (Note 4, 5)
-
Page 476: Precautions For Using Rs-422/Rs-232C/Usb Communication Function
14. COMMUNICATION FUNCTION 14.1.2 Precautions for using RS-422/RS-232C/USB communication function Note the following to prevent an electric shock and malfunction of the servo amplifier. (1) Power connection of personal computers Connect your personal computer with the following procedures. (a) When you use a personal computer with AC power supply 1) When using a personal computer with a three-core power plug or power plug with grounding wire, use a three-pin socket or ground the grounding wire. -
Page 477: Communication Specifications
14. COMMUNICATION FUNCTION 14.2 Communication specifications 14.2.1 Outline of communication Receiving a command, this servo amplifier returns data. The device which gives the command (e.g. personal computer) is called a master station and the device (servo amplifier) which returns data in response to the command is called a slave station. -
Page 478: Protocol
14. COMMUNICATION FUNCTION 14.3 Protocol 14.3.1 Transmission data configuration Since up to 32 axes may be connected to the bus, add a station No. to the command, data No., etc. to determine the destination servo amplifier of data communication. Set the station No. to each servo amplifier using the parameters. -
Page 479: Character Codes
14. COMMUNICATION FUNCTION 14.3.2 Character codes (1) Control codes Personal computer terminal Hexadecimal Code key operation Description name (ASCII code) (general) start of head ctrl + A start of text ctrl + B end of text ctrl + C end of transmission ctrl + D (2) Codes for data ASCII unit codes are used. -
Page 480: Error Codes
14. COMMUNICATION FUNCTION 14.3.3 Error codes Error codes are used in the following cases and an error code of single-code length is transmitted. Receiving data from the master station, the slave station sends the error code corresponding to that data to the master station. -
Page 481: Retry Processing
14. COMMUNICATION FUNCTION 14.3.6 Retry processing When a fault occurs in communication between the master and slave stations, the error code in the response data from the slave station is a negative response code ([B] to [F], [b] to [f]). In this case, the master station retransmits the message which was sent at the occurrence of the fault (retry processing). -
Page 482: Communication Procedure Example
14. COMMUNICATION FUNCTION 14.3.8 Communication procedure example The following example reads the set value of alarm history (last alarm) from the servo amplifier of station 0. Data item Value Description Station No. Servo amplifier station 0 Command Reading command Data No. Alarm history (last alarm) Start Station No. -
Page 483: Command And Data No. List
14. COMMUNICATION FUNCTION 14.4 Command and data No. list POINT Even if a command or data No. is the same between different model servo amplifiers, its description may differ. 14.4.1 Reading command (1) Status display (command [0] [1]) Frame Command Data No. - Page 484 14. COMMUNICATION FUNCTION Frame Command Data No. Description Status display length [0] [1] [8] [0] Status display data value and Cumulative feedback pulses processing information Motor-side cumu. feedback pulses (after gear) [8] [1] Servo motor speed Servo motor speed [8] [2] Droop pulses Motor-side droop pulses [8] [3]...
- Page 485 14. COMMUNICATION FUNCTION (2) Parameters (command [0] [4], [0] [5], [0] [6], [0] [7], [0] [8], and [0] [9]) Command Data No. Description Frame length [0] [4] [0] [1] Parameter group reading 0000: Basic setting parameters ([Pr. PA_ _ ]) 0001: Gain/filter parameters ([Pr.
- Page 486 14. COMMUNICATION FUNCTION (4) Alarm history (command [3] [3]) Command Data No. Description Alarm occurrence sequence Frame length [3] [3] [1] [0] Alarm No. in alarm history Most recent alarm [1] [1] First alarm in past [1] [2] Second alarm in past [1] [3] Third alarm in past [1] [4]...
- Page 487 14. COMMUNICATION FUNCTION (6) Status display at alarm occurrence (command [3] [5]) Frame Command Data No. Description Status display length [3] [5] [0] [0] Status display symbol and unit Cumulative feedback pulses Motor-side cumu. feedback pulses (after gear) [0] [1] Servo motor speed Servo motor speed [0] [2]...
- Page 488 14. COMMUNICATION FUNCTION Frame Command Data No. Description Status display length [3] [5] [8] [0] Status display data value and Cumulative feedback pulses processing information Motor-side cumu. feedback pulses (after gear) [8] [1] Servo motor speed Servo motor speed [8] [2] Droop pulses Motor-side droop pulses [8] [3]...
-
Page 489: Writing Commands
14. COMMUNICATION FUNCTION 14.4.2 Writing commands (1) Status display (command [8] [1]) Command Data No. Description Setting range Frame length [8] [1] [0] [0] Status display data deletion 1EA5 (2) Parameters (command [9] [4], [8] [5]) Command Data No. Description Setting range Frame length [9] [4]... - Page 490 14. COMMUNICATION FUNCTION (8) Test operation mode data (command [9] [2], [A] [0]) Command Data No. Description Setting range Frame length [9] [2] [0] [0] Input signal for test operation Refer to section 14.5.7. [A] [0] Forced output of signal pin Refer to section 14.5.9.
-
Page 491: Detailed Explanations Of Commands
14. COMMUNICATION FUNCTION 14.5 Detailed explanations of commands 14.5.1 Data processing When the master station transmits a command data No. or a command + data No. + data to a slave station, the servo amplifier returns a response or data in accordance with the purpose. When numerical values are represented in these send data and receive data, they are represented in decimal, hexadecimal, etc. - Page 492 14. COMMUNICATION FUNCTION (2) Writing processed data When the data to be written is handled as decimal, the decimal point position must be specified. If it is not specified, the data cannot be written. When the data is handled as hexadecimal, specify "0" as the decimal point position.
-
Page 493: Status Display Mode
14. COMMUNICATION FUNCTION 14.5.2 Status display mode (1) Reading the status display name and unit Read the status display name and unit. (a) Transmission Transmit the command [0] [1] and the data No. corresponding to the status display item to be read, [0] [0] to [0] [E] and [2] [0] to [2] [9]. -
Page 494: Parameter
14. COMMUNICATION FUNCTION 14.5.3 Parameter (1) Specification of the parameter group To read or write the parameter settings, etc., the group of the parameters to be operated must be specified in advance. Write data to the servo amplifier as follows to specify the parameter group. Transmission Command Data No. - Page 495 14. COMMUNICATION FUNCTION (4) Reading the setting Read the parameter setting. Specify a parameter group in advance. (Refer to (1) of this section.) (a) Transmission Transmit the command [1] [5] and the data No. corresponding to the parameter No [0] [1] to [F] [F]. (Refer to section 14.4.1.) The data No.
- Page 496 14. COMMUNICATION FUNCTION (5) Reading the setting range Read the parameter setting range. Specify a parameter group in advance. (Refer to (1) of this section.) (a) Transmission When reading an upper limit value, transmit the command [1] [6] and the data No. [0] [1] to [F] [F] corresponding to the parameter No.
- Page 497 14. COMMUNICATION FUNCTION (6) Writing setting values POINT If setting values need to be changed with a high frequency (i.e. one time or more per one hour), write the setting values to the RAM, not the EEP-ROM. The EEPROM has a limitation in the number of write times and exceeding this limitation causes the servo amplifier to malfunction.
-
Page 498: External I/O Signal Status (Dio Diagnosis)
14. COMMUNICATION FUNCTION 14.5.4 External I/O signal status (DIO diagnosis) (1) Reading input device status Read the status of the input devices. (a) Transmission Transmit command [1] [2] and data No. [0] [0]. Command Data No. [1] [2] [0] [0] (b) Return The slave station returns the status of the input devices. - Page 499 14. COMMUNICATION FUNCTION (3) Reading the status of input devices switched on with communication Read the on/off status of the input devices switched on with communication. (a) Transmission Transmit command [1] [2] and data No. [6] [0]. Command Data No. [1] [2] [6] [0] (b) Return...
-
Page 500: Input Device On/Off
14. COMMUNICATION FUNCTION (5) Reading output device status Read the on/off status of the output devices. (a) Transmission Transmit command [1] [2] and data No. [8] [0]. Command Data No. [1] [2] [8] [0] (b) Return The slave station returns the status of the input/output devices. b1b0 1: On 0: Off... -
Page 501: Disabling/Enabling I/O Devices (Dio)
14. COMMUNICATION FUNCTION 14.5.6 Disabling/enabling I/O devices (DIO) You can disable inputs regardless of the I/O device status. When inputs are disabled, the input signals (devices) are recognized as follows. However, EM2 (Forced stop 2), LSP (Forward rotation stroke end), and LSN (Reverse rotation stroke end) cannot be disabled. -
Page 502: Input Devices On/Off (Test Operation)
14. COMMUNICATION FUNCTION 14.5.7 Input devices on/off (test operation) Each input devices can be turned on/off for test operation. However, when the device to be switched off is in the external input signal, also switch off the input signal. Transmit command [9] [2], data No. [0] [0], and data. Command Data No. -
Page 503: Test Operation Mode
14. COMMUNICATION FUNCTION 14.5.8 Test operation mode POINT The test operation mode is used to check operation. Do not use it for actual operation. If communication stops for longer than 0.5 s during test operation, the servo amplifier decelerates to a stop, resulting in servo-lock. To prevent this, continue communication all the time by monitoring the status display, etc. - Page 504 14. COMMUNICATION FUNCTION (2) JOG operation Transmit the command, data No., and data as follows to execute JOG operation. Start Select the JOG operation in the test Command : [8] [B] operation mode. Data No. : [0] [0] Data : 0001 (JOG operation) Servo motor speed setting Command : [A] [0]...
- Page 505 14. COMMUNICATION FUNCTION (3) Positioning operation (a) Operation procedure Transmit the command, data No., and data as follows to execute positioning operation. Start Select the JOG operation in the test Command [8] [B] operation mode. Data No. [0] [0] Data 0002 (Positioning operation) Servo motor speed setting Command...
- Page 506 14. COMMUNICATION FUNCTION (b) Temporary stop/restart/remaining distance clear Transmit the following command, data No., and data during positioning operation to make deceleration to a stop. Command Data No. Data [A] [0] [4] [1] STOP Transmit the following command, data No., and data during a temporary stop to restart. Command Data No.
-
Page 507: Output Signal Pin On/Off (Output Signal (Do) Forced Output)
14. COMMUNICATION FUNCTION 14.5.9 Output signal pin on/off (output signal (DO) forced output) In the test operation mode, the output signal pins can be turned on/off regardless of the servo status. Using command [9] [0], disable the external input signals in advance. (1) Selecting output signal (DO) forced output in the test operation mode Transmit command + [8] [B] + data No. -
Page 508: Alarm History
14. COMMUNICATION FUNCTION 14.5.10 Alarm history (1) Alarm No. reading Read alarm Nos. which occurred in the past. Alarm Nos. and occurrence times of No. 0 (last alarm) to No. 15 (sixteenth alarm in the past) are read. (a) Transmission Transmit command [3] [3] + data No. -
Page 509: Current Alarm
14. COMMUNICATION FUNCTION 14.5.11 Current alarm (1) Current alarm reading Read the alarm No. which is occurring currently. (a) Transmission Transmit command [0] [2] and data No. [0] [0]. Command Data No. [0] [2] [0] [0] (b) Return The slave station returns the alarm currently occurring. Alarm No. -
Page 510: Other Commands
14. COMMUNICATION FUNCTION 14.5.12 Other commands (1) Servo motor-side pulse unit absolute position Read the absolute position in the servo motor-side pulse unit. Note that overflow will occur in the position of 8192 or more revolutions from the home position. (a) Transmission Transmit command [0] [2] and data No. - Page 511 14. COMMUNICATION FUNCTION MEMO 14 - 38...
-
Page 512: Using A Linear Servo Motor
15. USING A LINEAR SERVO MOTOR 15. USING A LINEAR SERVO MOTOR When using the linear servo motor, read "Linear Servo Motor Instruction Manual" WARNING and "Linear Encoder Instruction Manual". POINT The linear servo system is available for the servo amplifiers of which software version is A5 or later. -
Page 513: Configuration Including Peripheral Equipment
When using the linear servo motor, set [Pr. PA01] to "_ _ 4 _". (1) MR-J4-_A_ The following configuration diagram shows an example for using a linear servo motor with MR-J4-10A. R S T (Note 2) Power supply... - Page 514 15. USING A LINEAR SERVO MOTOR (2) When using serial linear encoder with MR-J4-_A_-RJ The following configuration diagram shows an example for using a linear servo motor with MR-J4-10A- R S T (Note 2) Power supply Personal computer Molded-case MR Configurator2...
- Page 515 15. USING A LINEAR SERVO MOTOR (3) When using A/B/Z-phase differential output linear encoder with MR-J4-_A_-RJ The following configuration diagram shows an example for using a linear servo motor with MR-J4-10A- R S T (Note 2) Power supply Personal computer...
-
Page 516: Signals And Wiring
15. USING A LINEAR SERVO MOTOR 15.2 Signals and wiring Any person who is involved in wiring should be fully competent to do the work. Before wiring, turn off the power and wait for 15 minutes or more until the charge lamp turns off. -
Page 517: Operation And Functions
15. USING A LINEAR SERVO MOTOR Do not modify the equipment. The cables such as power wires deriving from the primary side cannot stand the CAUTION long-term bending action. Avoid the bending action by fixing the cables to the moving part, etc. Also, use the cable that stands the long-term bending action for the wiring to the servo amplifier. - Page 518 15. USING A LINEAR SERVO MOTOR (1) Startup procedure Start up the linear servo in the following procedure. Installation and wiring Set the linear servo motor series and linear servo motor type. (Refer to (2) of this section.) (Note 1) Set the linear encoder direction and the linear servo motor direction.
- Page 519 15. USING A LINEAR SERVO MOTOR (3) Setting of linear encoder direction and linear servo motor direction Set the first digit of [Pr. PC45] (Encoder pulse count polarity selection) so that the positive direction of the linear servo motor matches with the increasing direction of the linear encoder feedback. [Pr.
- Page 520 15. USING A LINEAR SERVO MOTOR (4) Linear encoder resolution setting Set the ratio of the electronic gear to the linear encoder resolution with [Pr. PL02 Linear encoder resolution - Numerator] and [Pr. PL03 Linear encoder resolution - Denominator]. POINT To enable the parameter values, cycle the power after setting.
- Page 521 15. USING A LINEAR SERVO MOTOR (1) Magnetic pole detection method by using MR Configurator2 The following shows the magnetic pole detection procedure by using MR Configurator2. (a) Magnetic pole detection by the position detection method Magnetic pole detection 1) Check that LSP (Forward rotation stroke end), LSN (Reverse rotation stroke end), and EM2 (Forced stop 2) are on, and then cycle the servo amplifier power.
- Page 522 15. USING A LINEAR SERVO MOTOR (b) Magnetic pole detection by the minute position detection method Magnetic pole detection 1) Check that LSP (Forward rotation stroke end), LSN (Reverse rotation stroke end), and EM2 (Forced stop 2) are on, and then cycle the servo amplifier power. Set [Pr.
- Page 523 15. USING A LINEAR SERVO MOTOR (2) Operation at the magnetic pole detection Note that the magnetic pole detection automatically starts simultaneously with the WARNING turning-on of the servo-on command. If the magnetic pole detection is not executed properly, the linear servo motor CAUTION may operate unexpectedly.
-
Page 524: Magnetic Pole Detection
15. USING A LINEAR SERVO MOTOR (a) For the incremental linear encoder POINT For the incremental linear encoder, the magnetic pole detection is required every time the power is turned on. By turning on SON (Servo-on) after power-on, the magnetic pole detection is automatically carried out. - Page 525 15. USING A LINEAR SERVO MOTOR 3) Linear servo motor movement (when LSP (Forward rotation stroke end) or LSN (Reverse rotation stroke end) is off) When LSP or LSN is off at servo-on, the magnetic pole detection is carried out as follows. The linear servo motor moves to a magnetic pole detection start position upon servo-on, and the magnetic pole...
- Page 526 15. USING A LINEAR SERVO MOTOR 3) After the completion of the magnetic pole detection, change [Pr. PL01] to "_ _ _ 0" (Magnetic pole detection disabled). [Pr. PL01] Magnetic pole detection disabled After the magnetic pole detection, by disabling the magnetic pole detection function with [Pr. PL01], the magnetic pole detection after each power-on is not required.
-
Page 527: Home Position Return
15. USING A LINEAR SERVO MOTOR 2) Specify the setting value that is an approximately 70% of the value set when [AL. 50 Overload 1], [AL. 51 Overload 2], [AL. 33 Overvoltage], [AL. E1 Overload warning 1], and [AL. EC Overload warning 2] occurred as the final setting value. - Page 528 15. USING A LINEAR SERVO MOTOR (1) Incremental linear encoder If the resolution or the stop interval (the third digit of [Pr. PL01]) of the linear CAUTION encoder is large, it is very dangerous since the linear servo motor may crash into the stroke end.
- Page 529 15. USING A LINEAR SERVO MOTOR POINT To execute a home position return securely, start a home position return after moving the linear servo motor to the opposite stroke end with JOG operation and others. Change the third digit value of [Pr. PL01] according to the linear encoder resolution.
- Page 530 15. USING A LINEAR SERVO MOTOR The following shows the relation between the stop interval at the home position return and the linear encoder resolution. For example, when the linear encoder resolution is 0.001 μm and the parameter for the stop interval at the home position return, [Pr.PL01], is set to "_ 5 _ _" (16777216 pulses), the stop interval is 16.777 mm.
-
Page 531: Test Operation Mode In Mr Configurator2
15. USING A LINEAR SERVO MOTOR 15.3.4 Test operation mode in MR Configurator2 The test operation mode is designed for checking servo operation. It is not for checking machine operation. Do not use this mode with the machine. Always use CAUTION the linear servo motor alone. -
Page 532: Function
15. USING A LINEAR SERVO MOTOR (3) Program operation Positioning operation can be performed in two or more operation patterns combined, without using a controller. Use this operation with the forced stop reset. This operation may be used independently of whether servo-on, servo-off, or whether a controller is connected or not. - Page 533 15. USING A LINEAR SERVO MOTOR (a) Position deviation error detection Set [Pr. PL04] to "_ _ _ 1" to enable the position deviation error detection. [Pr. PL04] Position deviation error detection enabled When you compare the model feedback position ( 1)) and the feedback position ( 2)) in figure 15.1, if the deviation is more than the value of [Pr.
- Page 534 15. USING A LINEAR SERVO MOTOR (2) Auto tuning function The auto tuning function during the linear servo motor operation is the same as that of the rotary servo motor. However, the calculation method of the load to motor mass ratio (J ratio) differs. The load to motor mass ratio (J ratio) on the linear servo motor is calculated by dividing the load mass by the mass of the linear servo motor primary side.
-
Page 535: Absolute Position Detection System
15. USING A LINEAR SERVO MOTOR 15.3.6 Absolute position detection system When the linear servo motor is used with the absolute position detection system, an absolute position linear encoder is required. (1) Operating conditions of absolute position detection system (a) Use an absolute type linear encoder. (b) Perform the magnetic pole detection in the incremental system and disable the magnetic pole detection after the detection. -
Page 536: Characteristics
15. USING A LINEAR SERVO MOTOR 15.4 Characteristics 15.4.1 Overload protection characteristics An electronic thermal is built in the servo amplifier to protect the linear servo motor, servo amplifier and linear servo motor power wires from overloads. [AL. 50 Overload 1] occurs if overload operation performed is above the electronic thermal protection curve shown in fig. -
Page 537: Power Supply Capacity And Generated Loss
15. USING A LINEAR SERVO MOTOR 15.4.2 Power supply capacity and generated loss Table 15.1 indicates servo amplifiers' power supply capacities and losses generated under rated load. For thermal design of an enclosed type cabinet, use the values in the table in consideration for the worst operating conditions. -
Page 538: Dynamic Brake Characteristics
15. USING A LINEAR SERVO MOTOR 15.4.3 Dynamic brake characteristics POINT Do not use dynamic brake to stop in a normal operation as it is the function to stop in emergency. For a machine operating at the recommended load to motor mass ratio or less, the estimated number of usage times of the dynamic brake is 1000 times while the machine decelerates from the rated speed to a stop once in 10 minutes. -
Page 539: Permissible Load To Motor Mass Ratio When The Dynamic Brake Is Used
15. USING A LINEAR SERVO MOTOR 15.4.4 Permissible load to motor mass ratio when the dynamic brake is used Use the dynamic brake under the load to motor mass ratio indicated in the following table. If the ratio is higher than this value, the dynamic brake may burn. If there is a possibility that the ratio may exceed the value, contact your local sales office. -
Page 540: Using A Direct Drive Motor
16. USING A DIRECT DRIVE MOTOR 16. USING A DIRECT DRIVE MOTOR CAUTION When using the direct drive motor, read "Direct Drive Motor Instruction Manual". POINT The direct drive servo system is available for the servo amplifiers of which software version is A5 or later. 16.1 Functions and configuration 16.1.1 Summary The fields of semiconductor/LCD manufacturing systems, mounters, and others have strong demands for... -
Page 541: Configuration Including Peripheral Equipment
16. USING A DIRECT DRIVE MOTOR 16.1.2 Configuration including peripheral equipment Connecting a direct drive motor of the wrong axis to the U, V, W, or CN2 may CAUTION cause a malfunction. POINT Equipment other than the servo amplifier and direct drive motor are optional or recommended products. -
Page 542: Signals And Wiring
16. USING A DIRECT DRIVE MOTOR Note 1. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used. When not using the power factor improving DC reactor, short P3 and P4. 2. -
Page 543: Operation And Functions
16. USING A DIRECT DRIVE MOTOR Connect the servo amplifier power output (U, V, and W) to the direct drive motor power input (U, V, and W) directly. Do not let a magnetic contactor, etc. intervene. Otherwise, it may cause a malfunction. Servo amplifier Direct drive motor Servo amplifier... -
Page 544: Startup Procedure
16. USING A DIRECT DRIVE MOTOR 16.3.1 Startup procedure Start up the direct drive servo in the following procedure. Perform this procedure once at startup. Installation and wiring Perform the magnetic pole detection. (Refer to section 16.3.2.) (Note 1, 4) Positioning operation check using the test operation mode (Note 1, 4) Incremental system Absolute position detection system... - Page 545 16. USING A DIRECT DRIVE MOTOR Note 1. Use MR Configurator2. 2. For the absolute position detection system, always turn on the Z-phase pulse of the direct drive motor while the servo amplifier power is on, and then turn the servo amplifier power supply off and on again. By turning off and on the power supply, the absolute position becomes confirmed.
- Page 546 16. USING A DIRECT DRIVE MOTOR (1) Magnetic pole detection method by using MR Configurator2 The following shows the magnetic pole detection procedure by using MR Configurator2. (a) Magnetic pole detection by the position detection method Magnetic pole detection Check that LSP (Forward rotation stroke end), LSN (Reverse rotation stroke end), and EM2 (Forced stop 2) are on, and then cycle the servo amplifier power.
- Page 547 16. USING A DIRECT DRIVE MOTOR (b) Magnetic pole detection by the minute position detection method Magnetic pole detection Check that LSP (Forward rotation stroke end), LSN (Reverse rotation stroke end), and EM2 (Forced stop 2) are on, and then cycle the servo amplifier power. Set [Pr.
-
Page 548: Magnetic Pole Detection
16. USING A DIRECT DRIVE MOTOR (2) Operation at the magnetic pole detection Note that the magnetic pole detection automatically starts simultaneously with the WARNING turning-on of the servo-on command. If the magnetic pole detection is not executed properly, the direct drive motor may CAUTION operates unexpectedly. - Page 549 16. USING A DIRECT DRIVE MOTOR 2) Direct drive motor movement (when LSP and LSN are on) Center of direct drive motor rotation part (Note) LSN LSP (Note) Servo-on position (Magnetic pole detection start position) Magnetic pole detection completion position 10 degrees or less Note.
- Page 550 16. USING A DIRECT DRIVE MOTOR 2) Execute the magnetic pole detection. (Refer to (2) (a) 1), 2) of this section.) 3) After the completion of the magnetic pole detection, change [Pr. PL01] to "_ _ _ 0" (Magnetic pole detection disabled).
-
Page 551: Function
16. USING A DIRECT DRIVE MOTOR (c) Setting example Magnetic pole detection [Pr. PL09] setting value Existent Alarm Non-existent While increasing the setting value of [Pr. PL09], carry out the An alarm has occurred magnetic pole detection repeatedly. when the setting value of [Pr. - Page 552 16. USING A DIRECT DRIVE MOTOR (b) Speed deviation error detection Set [Pr. PL04] to "_ _ _ 2" to enable the speed deviation error detection. [Pr. PL04] Speed deviation error detection enabled When you compare the model feedback speed ( 3)) and the feedback speed ( 4)) in figure 16.1, if the deviation is more than the value of [Pr.
-
Page 553: Absolute Position Detection System
16. USING A DIRECT DRIVE MOTOR 16.4 Absolute position detection system POINT To configure the absolute position detection system by using the direct drive motor, the battery and the absolute position storage unit (MR-BTAS01) are required. For encoder cables and absolute position storage units, refer to "Direct Drive Motor Instruction Manual". -
Page 554: Characteristics
16. USING A DIRECT DRIVE MOTOR Timing chart at power on under the condition of performing magnetic pole detection Power First servo-on after power on Second or later servo-on SON (Servo-on) ABSM (ABS transfer mode) During ABS transfer During ABS transfer (Note 1) (Note 1) ABSR (ABS request) - Page 555 16. USING A DIRECT DRIVE MOTOR 1000 1000 Operating Operating Servo-lock Servo-lock (Note) Load ratio [%] (Note) Load ratio [%] TM-RFM002C20/TM-RFM004C20/ TM-RFM048G20/TM-RFM072G20/ TM-RFM006C20/TM-RFM006E20/ TM-RFM120J10 TM-RFM012E20/TM-RFM018E20/ TM-RFM012G20/TM-RFM040J10 10000 1000 Operating Servo-lock (Note) Load ratio [%] TM-RFM240J10 Note. If operation that generates torque more than 100% of the rating is performed with an abnormally high frequency in a direct drive motor stop status (servo-lock status) or in a 30 r/min or less low-speed operation status, the servo amplifier may malfunction regardless of the electronic thermal protection.
-
Page 556: Power Supply Capacity And Generated Loss
16. USING A DIRECT DRIVE MOTOR 16.5.2 Power supply capacity and generated loss Table 16.1 indicates servo amplifiers' power supply capacities and losses generated under rated load. For thermal design of an enclosed type cabinet, use the values in the table in consideration for the worst operating conditions. -
Page 557: Dynamic Brake Characteristics
16. USING A DIRECT DRIVE MOTOR 16.5.3 Dynamic brake characteristics POINT Do not use dynamic brake to stop in a normal operation as it is the function to stop in emergency. For a machine operating at the recommended load to motor inertia ratio or less, the estimated number of usage times of the dynamic brake is 1000 times while the machine decelerates from the rated speed to a stop once in 10 minutes. - Page 558 16. USING A DIRECT DRIVE MOTOR (b) Dynamic brake time constant The following shows necessary dynamic brake time constant τ for equation 16.1. Speed [r/min] Speed [r/min] TM-RFM_C20 TM-RFM_E20 Speed [r/min] Speed [r/min] TM-RFM_G20 TM-RFM_J10 (2) Permissible load to motor inertia ratio when the dynamic brake is used Use the dynamic brake under the load to motor inertia ratio indicated in the following table.
- Page 559 16. USING A DIRECT DRIVE MOTOR MEMO 16 - 20...
-
Page 560: Fully Closed Loop System
17. FULLY CLOSED LOOP SYSTEM 17. FULLY CLOSED LOOP SYSTEM POINT The fully closed loop system is available for the servo amplifiers of which software version is A5 or above. When fully closed loop control system is used with this servo amplifier, "Linear Encoder Instruction Manual"... - Page 561 17. FULLY CLOSED LOOP SYSTEM The following table shows the functions of each control mode. Control Description Feature Position is controlled according to the servo motor-side data. Since this control is insusceptible to machine influence (such as machine resonance), Advantage Semi closed loop control the gains of the servo amplifier can be raised and the settling time shortened.
-
Page 562: Selecting Procedure Of Control Mode
17. FULLY CLOSED LOOP SYSTEM 17.1.2 Selecting procedure of control mode (1) Control mode configuration In this servo, a semi closed loop system or fully closed loop system can be selected as a control system. In addition, the fully closed loop control and dual feedback control can be selected by the [Pr. PE08] settings on the fully closed loop system. -
Page 563: System Configuration
17. FULLY CLOSED LOOP SYSTEM 17.1.3 System configuration (1) For a linear encoder (a) MR-J4-_A_ servo amplifier Servo amplifier (Note) Controller Two-wire type serial interface compatible linear encoder Load-side encoder signal Servo motor encoder signal Linear encoder head Servo motor Table Note. - Page 564 17. FULLY CLOSED LOOP SYSTEM (2) For a rotary encoder (a) MR-J4-_A_ servo amplifier Servo amplifier Servo motor encoder signal Drive part Controller (Note) (Note) Servo motor Load-side encoder signal Two-wire type rotary encoder HG-KR, HG-MR servo motor (4194304 pulses/rev) Note.
-
Page 565: Load-Side Encoder
17. FULLY CLOSED LOOP SYSTEM 17.2 Load-side encoder POINT Always use the load-side encoder cable introduced in this section. Using other products may cause a malfunction. For details of the load-side encoder specifications, performance and assurance, contact each encoder manufacturer. 17.2.1 LINEAR ENCODER Refer to "Linear Encoder Instruction Manual"... -
Page 566: Configuration Diagram Of Encoder Cable
17. FULLY CLOSED LOOP SYSTEM 17.2.3 Configuration diagram of encoder cable Configuration diagram for servo amplifier and load-side encoder is shown below. Cables used vary, depending on the load-side encoder. (1) Linear encoder Refer to Linear Encoder Instruction Manual for encoder cables for linear encoder. (a) MR-J4-_A_ servo amplifier MR-J4FCCBL03M branch cable (Refer to section 17.2.4) - Page 567 17. FULLY CLOSED LOOP SYSTEM (2) Rotary encoder Refer to "Servo Motor Instruction Manual (Vol. 3)" for encoder cables for rotary encoders. (a) MR-J4-_A_ servo amplifier MR-J4FCCBL03M branch cable (Refer to section 17.2.4) Servo amplifier (Note) MOTOR Encoder of rotary servo motor SCALE Servo motor HG-KR...
-
Page 568: Mr-J4Fccbl03M Branch Cable
17. FULLY CLOSED LOOP SYSTEM 17.2.4 MR-J4FCCBL03M branch cable Use MR-J4FCCBL03M branch cable to connect the rotary encoder and the load-side encoder to CN2 connector. When fabricating the branch cable using MR-J3THMCN2 connector set, refer to "Linear Encoder Instruction Manual". 0.3 m (Note 1) (Note 2) -
Page 569: Operation And Functions
17. FULLY CLOSED LOOP SYSTEM 17.3 Operation and functions 17.3.1 Startup (1) Startup procedure Start up the fully closed loop system in the following procedure. Completion of installation and wiring Adjustment and operation check in semi closed loop system Check that the servo equipment is normal. - Page 570 17. FULLY CLOSED LOOP SYSTEM (2) Selection of fully closed loop system By setting [Pr. PA01], [Pr. PE01] and the control command of controller, the control method can be selected as shown in the following table. Semi closed loop Absolute position [Pr.
- Page 571 17. FULLY CLOSED LOOP SYSTEM (3) Selection of load-side encoder communication method The communication method changes depending on the load-side encoder type. Refer to table 1.1 and "Linear Encoder Instruction Manual" for the communication method for each load- side encoder. Select the cable to be connected to CN2L connector in [Pr.
- Page 572 17. FULLY CLOSED LOOP SYSTEM (5) Setting of feedback pulse electronic gear POINT If an incorrect value is set in the feedback pulse electronic gear ([Pr. PE04], [Pr. PE05], [Pr. PE34], and [Pr. PE35]), [AL. 37 Parameter error] and an abnormal operation may occur.
- Page 573 17. FULLY CLOSED LOOP SYSTEM (b) Setting example when using the rotary encoder for the load-side encoder of roll feeder Conditions Servo motor resolution: 4194304 pulses/rev Pulley diameter on the servo motor side: 30 mm Pulley diameter on the rotary encoder side: 20 mm Rotary encoder resolution: 4194304 pulses/rev Drive part Pulley diameter...
- Page 574 17. FULLY CLOSED LOOP SYSTEM (6) Confirmation of load-side encoder position data Check the load-side encoder mounting and parameter settings for any problems. POINT Depending on the check items, MR Configurator2 may be used. Refer to section 17.3.8 for the data displayed on the MR Configurator2. When checking the following items, the fully closed loop control mode must be set.
- Page 575 17. FULLY CLOSED LOOP SYSTEM (7) Setting of fully closed loop dual feedback filter With the initial value (setting = 10) set in [Pr. PE08 Fully closed loop dual feedback filter the dual feedback filter], make gain adjustment by auto tuning, etc. as in semi closed loop control. While observing the servo operation waveform with the graph function, etc.
-
Page 576: Home Position Return
17. FULLY CLOSED LOOP SYSTEM 17.3.2 Home position return (1) General instruction Home position return is all performed according to the load-side encoder feedback data, independently of the load-side encoder type. It is irrelevant to the Z-phase position of the servo motor encoder. In the case of a home position return using a dog signal, the scale home position (reference mark) must be passed through when an incremental type linear encoder is used, or the Z-phase be passed through when a rotary encoder is used, during a period from a home position return start until the dog signal... - Page 577 17. FULLY CLOSED LOOP SYSTEM (b) Home position return using incremental linear encoder When you use an incremental linear encoder, LZ (Encoder Z-phase pulse) from the servo amplifier will be the home position (reference mark) of the linear encoder. Two or more home positions (reference marks) should not be set.
-
Page 578: Fully Closed Loop Control Error Detection Functions
17. FULLY CLOSED LOOP SYSTEM 17.3.3 Fully closed loop control error detection functions If fully closed loop control becomes unstable for some reason, the speed at servo motor side may increase abnormally. The fully closed loop control error detection function is a protective function designed to pre- detect it and stop operation. -
Page 579: Auto Tuning Function
17. FULLY CLOSED LOOP SYSTEM (b) Position deviation error detection Set [Pr. PE03] to "_ _ _ 2" to enable the position deviation error detection. [Pr. PE03] Position deviation error detection Comparing the servo motor-side feedback position (2)) and load-side feedback position (4)), if the deviation is not less than the set value (1 kpulses to 20000 kpulses) of [Pr. -
Page 580: Absolute Position Detection System Under Fully Closed Loop System
17. FULLY CLOSED LOOP SYSTEM 17.3.7 Absolute position detection system under fully closed loop system An absolute type linear encoder is necessary to configure an absolute position detection system under fully closed loop control using a linear encoder. In this case, the encoder battery (MR-BAT6V1SET) need not be installed to the servo amplifier. -
Page 581: About Mr Configurator2
17. FULLY CLOSED LOOP SYSTEM 17.3.8 About MR Configurator2 Using MR Configurator2 can confirm if the parameter setting is normal or if the servo motor and the load- side encoder operate properly. This section explains the fully closed diagnosis screen. Click "Monitor start"... - Page 582 17. FULLY CLOSED LOOP SYSTEM Symbol Name Explanation Unit Encoder information The load-side encoder information is displayed. The display contents differ depending on the load-side encoder type. ID: The ID No. of the load-side encoder is displayed. Data 1: For the incremental type linear encoder, the counter from powering on is displayed.
- Page 583 17. FULLY CLOSED LOOP SYSTEM MEMO 17 - 24...
-
Page 584: Appendix
APPENDIX App. 1 Peripheral equipment manufacturer (for reference) Names given in the table are as of October 2013. Manufacturer Reference J.S.T. Mfg. Co., Ltd. Junkosha Purchase from Toa Electric Industrial Co. Ltd., Nagoya Branch Soshin Electric Soshin Electric Co., Ltd. TE Connectivity TE Connectivity Ltd. - Page 585 For sea or air transportation, attaching the handling label (figure) and the Shipper's Declaration for Dangerous Goods are required to the package of a Mitsubishi cell or battery. In addition, attaching them to the outer package containing several packages of Mitsubishi cells or batteries are also required.
-
Page 586: App. 3 Symbol For The New Eu Battery Directive
Note. This symbol mark is for EU countries only. This symbol mark is according to the directive 2006/66/EC Article 20 Information for end-users and Annex II. Your MITSUBISHI ELECTRIC product is designed and manufactured with high quality materials and components which can be recycled and/or reused. - Page 587 Always use the MR-J4 servo amplifiers within specifications (voltage, temperature, etc. Refer to each instruction manual for details.). Mitsubishi Electric Co. accepts no claims for liability if the equipment is used in any other way or if modifications are made to the device, even in the context of mounting and installation.
- Page 588 APPENDIX Table: Recommended crimp terminals Servo amplifier-side crimp terminals Symbol Manufacturer Applicable tool Crimp terminal (Note 2) Body Head Dice FVD5.5-4 YNT-1210S b (Note 1) 8-4NS YHT-8S FVD2-4 YNT-1614 DH-122 FVD14-6 YF-1 YNE-38 DH-112 FVD5.5-6 YNT-1210S DH-123 FVD22-6 YF-1 YNE-38 DH-113 DH-124 FVD38-6...
- Page 589 APPENDIX (b) Selection example of MCCB and fuse When a servo amplifier is protected by T class fuses or circuit breaker having an interrupting rating not less than 300 A effective value and 240 V maximum, use T class fuses or molded-case circuit breaker (UL489 Listed MCCB) as the following table.
- Page 590 (b) For Declaration of Conformity (DoC) Hereby, MITSUBISHI ELECTRIC EUROPE B.V., declares that the servo amplifiers are in compliance with the necessary requirements and standards (2006/42/EC, 2004/108/EC and 2006/95/EC). For the copy of Declaration of Conformity, contact your local sales office.
- Page 591 APPENDIX (d) Over-temperature protection for motor Motor Over temperature sensing is not provided by the drive. (e) Capacitor discharge It takes 15 minutes for capacitor discharging. Do not touch the unit and terminals immediately after power off. (f) Branch circuit protection For installation in United States, branch circuit protection must be provided, in accordance with the National Electrical Code and any applicable local codes.
- Page 592 APPENDIX (6) Protect the cables with appropriate ways (routing them in a cabinet, using a cable guard, etc.). (7) Keep the required clearance/creepage distance depending on voltage you use. App. 4.2.6 Disposal Disposal of unusable or irreparable devices should always occur in accordance with the applicable country- specific waste disposal regulations.
- Page 593 APPENDIX App. 4.4 Electrical Installation and configuration diagram Turn off the molded-case circuit breaker (MCCB) to avoid electrical shocks or WARNING damages to the product before starting the installation or wiring. The installation complies with IEC/EN 60204-1. The voltage supply to machines CAUTION must be 20 ms of tolerance against instantaneous power failures as specified in IEC/EN 60204-1.
- Page 594 APPENDIX (2) 1-phase input for MR-J4 1-axis servo amplifier Servo amplifier (1-phase MCCB L2 L3 230 V AC) or fuse Power (Note) supply MCCB Controller (3-phase or fuse 400 V AC) Encoder cable Transformer U/V/W/PE (star-connected) Cabinet side Machine side Servo motor Encoder Note.
- Page 595 APPENDIX (1) HG/HF/HC/HA series servo motors (Mfg.: Mitsubishi Electric) (2) Using a servo motor complied with IEC60034-1 and Mitsubishi Electric encoder (OBA, OSA) App. 4.5 Signal App. 4.5.1 Signal The following shows MR-J4-10B signals as a typical example. STO I/O signal...
- Page 596 APPENDIX App. 4.6 Maintenance and service To avoid an electric shock, only qualified personnel should attempt inspections. WARNING For repair and parts replacement, contact your local sales office. Do not perform insulation resistance test on the servo amplifier. Otherwise, it may CAUTION cause a malfunction.
- Page 597 APPENDIX App. 4.6.2 Parts having service lives Service lives of the following parts are listed below. However, the service life vary depending or operating methods and environment. If any fault is found in the parts, they must be replaced immediately regardless of their service lives.
- Page 598 APPENDIX App. 4.7 Transportation and storage Transport the products correctly according to their mass. Stacking in excess of the limited number of product packages is not allowed. Do not hold the front cover to transport the servo amplifier. Otherwise, it may drop.
- Page 599 APPENDIX App. 4.8 Technical data App. 4.8.1 MR-J4 servo amplifier (1) 200 V class MR-J4-10_/MR-J4-20_/MR-J4-40_/ MR-J4-100_/MR-J4-200_/MR-J4-350_/ MR-J4-60_/MR-J4-70_/MR-J4W2-22B/ MR-J4-500_/MR-J4-700_/ Item MR-J4W2-44B/MR-J4W2-77B/ MR-J4W2-1010B/MR-J4-11K_/ MR-J4W3-222B/MR-J4W3-444B MR-J4-15K_/MR-J4-22K_ 3-phase or 1-phase 200 V AC to 240 V AC, Main circuit (line voltage) 3-phase 200 V AC to 240 V AC, 50 Hz/60 Hz 50 Hz/60 Hz Control circuit (line Power...
- Page 600 APPENDIX App. 4.8.2 Servo amplifier dimensions Variable dimension table [mm] Servo amplifier Mass [kg] MR-J4-10_/MR-J4-20_ MR-J4-40_/MR-J4-60_ Front Side MR-J4-70_/MR-J4-100_ MR-J4-200_ MR-J4-350_ MR-J4-500_ MR-J4-700_ MR-J4-11K_/MR-J4-15K_ 13.4 MR-J4-22K_ 18.2 MR-J4W2-22B/MR-J4W2-44B MR-J4W2-77B/MR-J4W2-1010B MR-J4W3-222B/MR-J4W3-444B MR-J4-60_4/MR-J4-100_4 MR-J4-200_4 MR-J4-350_4 MR-J4-500_4 MR-J4-700_4 MR-J4-11K_4/MR-J4-15K_4 13.4 MR-J4-22K_4 18.2 App. 4.8.3 Mounting hole Screw Variable dimensions [mm] Servo amplifier...
- Page 601 APPENDIX App. 4.9 Check list for user documentation MR-J4 installation checklist for manufacturer/installer The following items must be satisfied by the initial test operation at least. The manufacturer/installer must be responsible for checking the standards in the items. Maintain and keep this checklist with related documents of machines to use this for periodic inspection. 1.
-
Page 602: App. 5 Mr-J3-D05 Safety Logic Unit
APPENDIX App. 5 MR-J3-D05 Safety logic unit App. 5.1 Contents of the package Open packing, and confirm the content of packing. Contents Quantity MR-J3-D05 Safety logic unit Connector for CN9 1-1871940-4 (TE Connectivity) Connector for CN10 1-1871940-8 (TE Connectivity) MR-J3-D05 Safety Logic Unit Installation Guide App. - Page 603 App. 5.4 Residual risk Machine manufacturers are responsible for all risk evaluations and all associated residual risks. Below are residual risks associated with the STO/EMG function. Mitsubishi is not liable for any damages or injuries caused by the residual risks.
- Page 604 APPENDIX (7) Perform all risk assessments and safety level certification to the machine or the system as a whole. It is recommended that a Certification Body final safety certification of the system be used. (8) To prevent accumulation of multiple malfunctions, perform a malfunction check at regular intervals as deemed necessary by the applicable safety standard.
- Page 605 APPENDIX App. 5.7.2 Specifications Safety logic unit model MR-J3-D05 Voltage 24 V DC Control circuit Permissible 24 V DC ± 10% power supply voltage fluctuation Power supply 0.5 (Note 1, 2) capacity Compatible system 2 systems (A-axis, B-axis independent) Shut-off input 4 points (2 point ×...
- Page 606 APPENDIX App. 5.7.3 When using MR-J3-D05 with an MR-J4 series servo amplifier (1) System configuration diagram The following shows the connection targets of the STO switch and STO release switch. POINT MR-D05UDL_M (STO cable) for MR-J3 series cannot be used. MR-J3-D05 MR-J4_A_(-RJ) Power...
- Page 607 APPENDIX (2) Connection example 24 V DC RESA RESB MR-J3-D05 (Note) (Note) STOA STOB (A-axis) (B-axis) SDI1A+ SDI1A- MR-J4_A_(-RJ) SDO1A+ Control circuit SDO1A- CN8A STO1 STO2 CN10 SDI2A+ STOCOM SDI2A- TOFB1 SRESA+ SRESA- TOFB2 SDO2A+ TOFCOM SDO2A- TOFA EM2 (A-axis) Servo motor SDI1B+ SDI1B-...
- Page 608 APPENDIX App. 5.8 Signal App. 5.8.1 Connector/pin assignment (1) CN8A Device Symbol Pin No. Function/application division A-axis STO1 STO1A- Outputs STO1 to A-axis driving device. STO1A+ Outputs the same signal as A-axis STO2. STO state (base shutdown): Between STO1A+ and STO1A- is opened. STO release state (in driving): Between STO1A+ and STO1A- is closed.
- Page 609 APPENDIX (4) CN10 Device Symbol Pin No. Function/application division A-axis SDI2A+ Connect this device to a safety switch for A-axis driving device. DI-1 shutdown 2 SDI2A- Input the same signal as A-axis shutdown 1. STO state (base shutdown): Open between SDI2A+ and SDI2A-. STO release state (in driving): Close between SDI2A+ and SDI2A-.
- Page 610 APPENDIX (b) Digital output interface DO-1 This is a circuit of collector output terminal of the output transistor. When the output transistor is turned on, collector terminal current will be applied for the output. A lamp, relay or photocoupler can be driven.
- Page 611 APPENDIX App. 5.8.3 Wiring CN9 and CN10 connectors Handle with the tool with care when connecting wires. (1) Wire strip (a) Use wires with size of AWG 24 to 20 (0.22 mm to 0.5 mm ) (recommended electric wire: UL1007) and strip the wires to make the stripped length 7.0 mm ±...
- Page 612 APPENDIX 2) Connecting wires a) Confirm the model number of the housing, contact and tool to be used. b) Insert the tool diagonally into the receptacle assembly. c) Insert the tool until it hits the surface of the receptacle assembly. At this stage, the tool is vertical to the receptacle assembly.
- Page 613 APPENDIX (b) Using a screwdriver To avoid damaging housings and springs when wiring with screwdriver, do not put excessive force. Be cautious when connecting. 1) Adjusting screw driver Diameter: 2.3 mm ± 0.05 mm Diameter: 2.5 mm ± 0.05 mm Length: 120 mm or less Length: 120 mm or less Width: 2.3 mm...
- Page 614 APPENDIX (3) Connector insertion Insert the connector all the way straight until you hear or feel clicking. When removing the connector, depress the lock part completely before pulling out. If the connector is pulled out without depressing the lock part completely, the housing, contact and/or wires may be damaged. (4) Compatible wire Compatible wire size is listed below.
- Page 615 APPENDIX App. 5.9 LED display I/O status, malfunction and power on/off are displayed with LED for each A-axis and B-axis. Description Column A Column B Monitor LED for start/reset SRES Off: The start/reset is off. (The switch contact is opened.) On: The start/reset is on.
- Page 616 APPENDIX App. 5.11 Troubleshooting When power is not supplied or FAULT LED turns on, refer the following table and take the appropriate action. Event Description Cause Action Power is not supplied. Power LED does not turn on 1. 24 V DC power supply is Replace the 24 V DC power supply.
- Page 617 APPENDIX App. 5.12 Dimensions [Unit: mm] 22.5 19.5 Approx. 22.5 Approx. 80 9.75 φ5 mounting hole Rating plate 9.75 CN8A 2-M4 screw CN8B CN10 Mounting hole process drawing Mounting screw Pin assignment CN8A CN8B Screw size: M4 Tightening torque: 1.2 N•m TOF2A TOF1A TOF2B...
- Page 618 APPENDIX App. 5.13 Installation Follow the instructions in this section and install MR-J3-D05 in the specified direction. Leave clearances between MR-J3-D05 and other equipment including the cabinet. Cabinet Cabinet Cabinet 100 mm or longer 40 mm or 80 mm or longer 10 mm or longer for wiring...
- Page 619 APPENDIX Name Model Description 1) Connector MR-J3-D05 attachment connector Connector for CN9: 1-1871940-4 Connector for CN10: 1-1871940-8 (TE Connectivity) (TE Connectivity) 2) STO cable MR-D05UDL3M-B Connector set: 2069250-1 Cable length: 3 m (TE Connectivity) COMPLIANCE WITH THE MACHINERY DIRECTIVES The MR-J3-D05 complies with the safety components laid down in the directive 2006/42/EC (Machinery). App.
-
Page 620: App. 6 Ec Declaration Of Conformity
APPENDIX App. 6 EC declaration of conformity The MR-J4 series servo amplifiers and MR-J3-D05 safety logic unit complies with the safety component laid down in the Machinery directive. App. - 37... - Page 621 APPENDIX App. - 38...
-
Page 622: App. 7 Analog Monitor
APPENDIX App. 7 Analog monitor POINT A voltage of analog monitor output may be irregular at power-on. The servo status can be output to two channels in terms of voltage. (1) Setting Change the following digits of [Pr. PC14] and [Pr. PC15]. [Pr. - Page 623 APPENDIX (2) Set content POINT When you use a linear servo motor, replace the following left words to the right words. → (linear servo motor) speed (servo motor) speed → Positive direction CCW direction → Negaative direction CW direction → Thrust Torque The servo amplifier is factory-set to output the servo motor speed to MO1 (Analog monitor 1) and the torque to MO2 (Analog monitor 2).
- Page 624 APPENDIX Setting Setting Output item Description Output item Description value value Feedback position Feedback position CCW direction CCW direction 10 [V] 10 [V] (Note 1, 2, 3) (Note 1, 2, 3) (±10 V/1 Mpulse) (±10 V/10 Mpulse) 1M [pulse] 10M [pulse] 1M [pulse] 10M [pulse] -10 [V]...
- Page 625 APPENDIX (3) Analog monitor block diagram Speed Speed Current Droop pulses Bus voltage command command 2 command Current Speed encoder command Command Position Speed Current Servo motor pulse control control control Encoder inside temperature Current feedback Encoder Differen- tiation Position feedback Feedback Servo motor Torque...
-
Page 626: App. 8 Two-Wire Type Encoder Cable For Hg-Mr/Hg-Kr
APPENDIX App. 8 Two-wire type encoder cable for HG-MR/HG-KR Use a two-wire type encoder cable for the fully closed loop control by the MR-J4-_A_ servo amplifiers. For MR-EKCBL_M-_ encoder cables for HG-MR and HG-KR, up to 20 m cables are two-wire type. Therefore, when you need a longer encoder cable of two-wire type than 20 m, fabricate one using MR- ECNM connector set. -
Page 627: App. 9 How To Replace Servo Amplifier Without Magnetic Pole Detection
APPENDIX App. 8.3 Internal wiring diagram Servo amplifier-side Servo motor-side connector connector Plate (Note) Note. Always make connection for use in an absolute position detection system. Wiring is not necessary for use in an incremental system. App. 9 How to replace servo amplifier without magnetic pole detection Be sure to write the magnetic pole information of the servo amplifier before the replacement to the servo amplifier after the replacement. - Page 628 APPENDIX 3) Click the "Magnetic pole information" button ( 1) in figure) to open the magnetic pole information window. 4) Click "Read All" of the magnetic pole information window. ( 2) in figure) 5) Confirm the data 1 and data 2 ( 3) in figure) of the magnetic pole information window and take notes.
- Page 629 REVISIONS *The manual number is given on the bottom left of the back cover. Print Data *Manual Number Revision Mar. 2012 SH(NA)030107-A First edition Jun. 2012 SH(NA)030107-B 4. Additional instructions (2) The sentences are added. Wiring 4. Additional instructions (3) The sentences are added.
- Page 630 Print Data *Manual Number Revision Jun. 2012 SH(NA)030107-B Section 5.2.3 The sentences are added to PC12 and PC13, PC21 is added, and the sentences are added to the initial value in PC37. Section 5.2.6 PF09 and PF15 are added. Section 7.3.1 The sentences are added to POINT.
- Page 631 Print Data *Manual Number Revision The reference is changed. Feb. 2013 SH(NA)030107-E COMPLIANCE WITH UL/CSA STANDARD COMPLIANCE WITH KC The reference is changed. MARK Section 1.1 The sentences and table of combination are added. Section 1.2 POINT is added. Section 1.2 (1) CN2L connector, Note 5 and 6 are added.
- Page 632 Print Data *Manual Number Revision [Pr. PA17], [Pr. PA18], and [Pr. PA26] are added. [Pr. PA27] is Feb. 2013 SH(NA)030107-E Section 5.1.1 changed. The operation mode is added. Section 5.1.3 [Pr. PC44] and [Pr. PC45] are added. The operation mode is added. Section 5.1.1 to 5.1.6 The operation mode is added.
- Page 633 Print Data *Manual Number Revision Aug. 2013 SH(NA)030107-F Section 3.9.1 Note 6 is added. Section 5.1.3 Analog torque/thrust limit maximum output of [Pr. PC13] is deleted. Section 5.2.1 The sentences are added to [Pr. PA13]. Section 5.2.3 Analog torque/thrust limit maximum output of [Pr. PC13] is deleted. Section 5.2.6 [Pr.
- Page 634 Print Data *Manual Number Revision Oct. 2013 SH(NA)030107-G Section 5.2.3 [Pr. PC14] The content is changed. Chapter 6 POINT is added. Section 6.2 POINT is added. Chapter 7 POINT is added. Section 7.1.1 (1) The content of the table is changed. Section 7.1.3 POINT is added.
- Page 635 This manual confers no industrial property rights or any rights of any other kind, nor does it confer any patent licenses. Mitsubishi Electric Corporation cannot be held responsible for any problems involving industrial property rights which may occur as a result of using the contents noted in this manual.
- Page 636 : +82-2-3660-9510 1480-6, Gayang-Dong, Gangseo-Gu, Seoul, 157-200, Korea : +82-2-3664-8372/8335 Singapore MITSUBISHI ELECTRIC ASIA PTE. LTD. : +65-6473-2308 307 Alexandra Road, Mitsubishi Electric Building, Singapore 159943 : +65-6476-7439 Thailand MITSUBISHI ELECTRIC FACTORY AUTOMATION (THAILAND) : +66-2682-6522 to 31 CO., LTD.
- Page 637 Warranty 1. Warranty period and coverage We will repair any failure or defect hereinafter referred to as "failure" in our FA equipment hereinafter referred to as the "Product" arisen during warranty period at no charge due to causes for which we are responsible through the distributor from which you purchased the Product or our service provider.
- Page 638 MODEL MR-J4-A INSTRUCTIONMANUAL MODEL 1CW804 CODE HEAD OFFICE : TOKYO BLDG MARUNOUCHI TOKYO 100-8310 This Instruction Manual uses recycled paper. SH (NA) 030107-G (1310) MEE Printed in Japan Specifications are subject to change without notice.
- Page 640 Vernon hills, IL 60061 Phone: +1 (847) 478-2100 Fax: +1 (847) 478-0328 Mitsubishi Electric Europe B.V. / FA - European Business Group / Gothaer Straße 8 / D-40880 Ratingen / Germany / Tel.: +49(0)2102-4860 / Fax: +49(0)2102-4861120 / info@mitsubishi-automation.com / https://eu3a.mitsubishielectric.com...
Need help?
Do you have a question about the MR-J4-10A and is the answer not in the manual?
Questions and answers