Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Related Manuals for Flintec EM100-F




Summary of Contents for Flintec EM100-F
- Page 1 EM100-F User Manual 0084293 User Manual EM100-F v1.5 February 2020 Page 1 of 93...
-
Page 2: Table Of Contents
EM100-F User Manual 0084293 Table of Contents EM100 Module .......................... 7 1.1. Introduction ........................7 1.2. Disclaimer ......................... 8 1.3. Safety Instructions ......................9 Specification .......................... 10 Getting Started ........................11 3.1. Labelling .......................... 11 3.2. Dimensions ........................12 3.3. - Page 3 EM100-F User Manual 0084293 5.2.5. DS Set Display Step Size ..................31 5.2.6. DP Set Decimal Point Position ................... 31 5.2.7. CZ Set Calibration Zero Point ..................31 5.2.8. CG Set Calibration Gain (Span) ................. 32 5.2.9. ZT Enable/Disable Zero-Tracking ................32 5.2.10.
- Page 4 EM100-F User Manual 0084293 5.6.6. GW Get Data String (Net, Gross & Status) ..............45 5.6.7. GA Get Triggered Average Value ................46 5.6.8. GL Get Data String (Average, Gross & Status) ............46 5.6.9. OF Output Format for Data String GW & GL .............. 46 5.6.10.
- Page 5 EM100-F User Manual 0084293 5.10.8. TD Transmission Delay ..................57 5.10.9. CTR Set CAN Bus Termination Resistance............57 5.10.10. STR Set RS-485 Termination Resistance .............. 57 5.10.11. SBR Set RS-485 Biasing Resistance ..............57 5.11. Save Calibration & Setup Data Commands – CS, WP, SS, SDD ........58 5.11.1.
- Page 6 EM100-F User Manual 0084293 5.13.22. PD17 Pre-Fill Level – 2 Set-Point ................ 70 5.13.23. PD18 Filling Timeout ....................71 5.13.24. PD19 Underweight Post-Fill Time ................71 5.13.25. PD20 Tare Interval ....................71 5.13.26. PD21 Bag Rupture Blanking .................. 72 5.13.27.
-
Page 7: Em100 Module
Its high-speed measuring rate, advanced filters and optimised software functions are especially useful for gravimetric filling and other dynamic processes. The EM100-F model is an approved accuracy class III module examined under OIML R61. The measurement module forms part of an approved (‘legal-for-trade’) weighing system. The EM100-F can be used in ‘legal-for-trade’... -
Page 8: Disclaimer
Flintec reserves the right to revise this manual and alter its content without notification at any time. Neither Flintec nor its affiliates shall be liable to the purchaser of this product or third parties for damages, losses, costs, or expenses incurred by purchaser or third parties as a result of: accident, misuse, or abuse of this product or unauthorized modifications, repairs, or alterations to this product, or failure to strictly comply with Flintec operating and maintenance instructions. -
Page 9: Safety Instructions
ALWAYS DISCONNECT this equipment from the power source before cleaning or performing maintenance. CALL Flintec for parts, information, and service. WARNING: Only permit qualified personnel to service this equipment. Exercise care when making checks, tests and adjustments that must be made with power on. -
Page 10: Specification
EM100-F User Manual 0084293 2. Specification EM100-F Application Bottling/Filling Bridge Excitation Load-Cell/Sensor 4-Wire or 6-Wire Accuracy Class X(0,2); X(0,5); X(1); X(2) Weighing Range Single Interval, Multi-Range or Multi-Interval Verification Scale Interval 10,000 Minimum Input Sensitivity 0.05µV/Count Certified Accuracy 0.3µV/vsi Resolution (External) ±350,000 counts... -
Page 11: Getting Started
Flintec Device Configuration (FDC) application software. Download the latest copy of FDC from the Flintec website (www.flintec.com). Note: The Flintec FDC application was developed in-conjunction with the ‘Peak System’ USB to CAN adaptor. If using the CANopen interface AND the FDC application, only use the ‘Peak System’... -
Page 12: Dimensions
EM100-F User Manual 0084293 3.2. Dimensions External Dimensions (Top Side) External Dimensions (Underside) Page 12 of 93... -
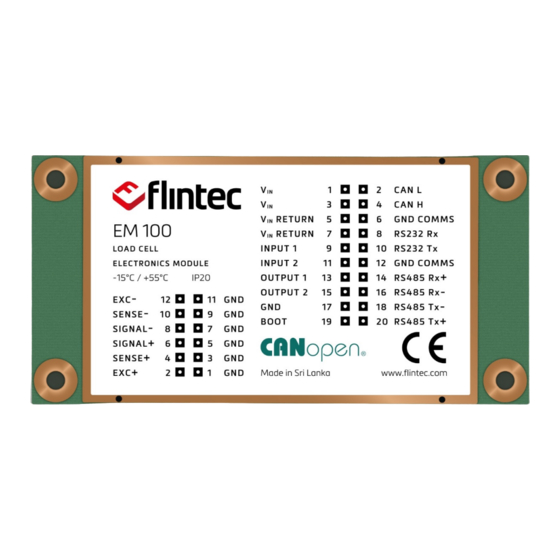
Page 13: Connections
EM100-F User Manual 0084293 3.3. Connections J1 Power & Comms J3 Load Cell J1 Power & Comms J3 Load Cell Page 13 of 93... -
Page 14: Load-Cell Connections
EM100-F User Manual 0084293 3.3.1. Load-Cell Connections Connect the input using the colour coding for Load-cell connections: EM100 J3 Load-Cell Pin-Out Function Excitation+ Sense+ Signal+ Signal- Sense- Excitation- 1, 3, 5, 7, 9 & 11 Note: If using 4-wire configuration, tie the Excitation+ (EXC+) to the Sense+ (S+) & Excitation- (EXC-) to the Sense- (S-) for correct configuration. -
Page 15: Power Connection
EM100-F User Manual 0084293 3.3.2. Power Connection The power supply is designed to accept a +12V or +24V supply. The power supply ground is not the same potential as the comms or main chassis ground pins. Only use the appropriate power and return pins for the supply, all comms and GPIOs pins to be referenced to the associated comms or main chassis ground. -
Page 16: Rs-232 Connection
EM100-F User Manual 0084293 3.3.3. RS-232 Connection Page 16 of 93... -
Page 17: Rs-485 Connection
EM100-F User Manual 0084293 3.3.4. RS-485 Connection The RS-485 network requires a 120Ω termination resistor at both the host end (EM100) and at the furthest point in the network. The EM100 has a software selectable terminator built-in (see ‘STR’ command). -
Page 18: Canopen Connection
EM100-F User Manual 0084293 3.3.5. CANopen Connection Note: For the CAN network to operate properly, it is necessary to place a 120Ω termination resistor at both the host end (EM100) and at the furthest point in the network. The EM100 has a software selectable terminator built-in (see ‘CTR’... -
Page 19: Em100 With Adaptor Board
EM100-F User Manual 0084293 3.3.7. EM100 with Adaptor Board Page 19 of 93... -
Page 20: Driver Check
USB-to-serial converter, consult the manufacturer for instructions and latest drivers. If using the USB CDC connection, the following driver from STMicroelectronics will need to be installed. View the ST.com website for the latest revision: http://www.st.com/en/development-tools/stsw-stm32102.html An installation manual is available from the Flintec website (www.flintec.com). Page 20 of 93... -
Page 21: Calibration
EM100-F User Manual 0084293 3.5. Calibration 3.5.1. Calibration Commands The calibration of EM100 is only possible after opening a calibration sequence. See ‘Calibration Commands’ Chapter for more details on the following commands. Command CE: Calibration Enable – Returns the current TAC value. -
Page 22: Calibration Sequence
EM100-F User Manual 0084293 3.5.3. Calibration Sequence Example: Setup of zero-point, span and decimal point. The chosen calibration weight has the value 5000 (increments). That could be 500g, 5kg or 5000kg. We calibrate with 500g. The decimal point is set up by command DP’x’ (x=1, 2 or 3), here 1 figure after the decimal point. -
Page 23: Commands Overview
EM100-F User Manual 0084293 4. Commands Overview Command Factory Default Parameter Range Description Allocation Source for a Set-Point A’n’ Zero. 0…2dec. (Gross, Net or Average). N/A. N/A. Abort Cycle. Zero. 0…255dec. Set Device Address (0=perm active). 20000 10000. ±33000dec. (mV/V) Absolute Gain Calibration. - Page 24 EM100-F User Manual 0084293 No Default. N/A. Get Net Value. No Default. N/A. Get Peak-to-Peak Value. No Default. N/A. Get ADC Sample. No Default. N/A. Get Tare Value. No Default. N/A. Get Valley Value. No Default. N/A. Get Data String (Net, Gross, Status).
- Page 25 EM100-F User Manual 0084293 0..99999dec. PD14 N/A. Fine-Fill Weight Value. 0..99999dec. PD15 N/A. Filling Weight Value. 0..99999dec. PD16 N/A. In-Flight Weight Value. 0..99999dec. PD17 N/A. Pre-Fill Level 2nd Setpoint Value. PD18 N/A. 0..65535dec. Filling Timeout Value. PD19 N/A. 0..65535dec. Underweight Post-Fill Time Value.
- Page 26 EM100-F User Manual 0084293 Zero. 0…1dec. Set/Clear Non-Volatile Tare. N/A. No Default. Software Trigger. Zero. 0…7dec. Output Averaging Update Rate. Save Setup Data to Non-Volatile N/A. N/A. Memory. Zero. 0…65535dec. Warm-Up Time (secs). Zero. 0…999999dec. Initial Zero Range. Zero. 0…1dec.
-
Page 27: Command Descriptions
EM100-F User Manual 0084293 5. Command Descriptions 5.1. System Diagnostic Commands – FPN, FFV, IS, SR, RS Use these commands to get the model type, firmware version or device status. These commands are sent without parameters. 5.1.1. FPN Get Device Identity... -
Page 28: Sr Software Reset
EM100-F User Manual 0084293 • The example decodes the result S:067000 as follows: • Signal Stable (no motion) [=1]. • Zero Action Performed [=2]. • Tare Not Active [=0]. • Weight <> 0 [=0]. • Input 1 Not Active [=0]. -
Page 29: Calibration Commands - Ce, Cm'n', Ci, Mr, Ds, Dp, Cz, Cg, Zt, Fd, Iz, Zr, Zi, Tm
EM100-F User Manual 0084293 5.2. Calibration Commands – CE, CM’n’, CI, MR, DS, DP, CZ, CG, ZT, FD, IZ, ZR, ZI, TM, TN, ZN, AG, AZ, WT Note: All changes to the calibration commands must be stored in non-volatile memory using the ‘CS’... -
Page 30: Ci Set Minimum Output Value
EM100-F User Manual 0084293 It is necessary: 1 ≤ MAX1 < MAX2 < MAX3 ≤ 99999. Note: The range, in which a scale can be set to zero (‘SZ’) or automatic zero-tracking (‘ZT’) is active, is ±2% of CM value. -
Page 31: Ds Set Display Step Size
EM100-F User Manual 0084293 5.2.5. DS Set Display Step Size This command allows the output to step up or down by a unit other than 1. Permitted values are 1, 2, 5, 10, 20, 50, 100, 200 and 500. Master Sends... -
Page 32: Cg Set Calibration Gain (Span)
EM100-F User Manual 0084293 5.2.8. CG Set Calibration Gain (Span) This is the reference point for calibration under load and is subject to TAC control. Permitted values are from 1 to 99999. Master Sends Slave Responds With Meaning G+10000 Request: Calibration Weight=10,000dec. -
Page 33: Fd Reset To Factory Default Settings
EM100-F User Manual 0084293 5.2.10. FD Reset to Factory Default Settings This command puts the EM100 back to a known state. The data will be written to non-volatile memory and the TAC will be incremented by 1. Master Sends Slave Responds With... -
Page 34: Zi Initial Zero Range
EM100-F User Manual 0084293 5.2.13. ZI Initial Zero Range Define the initial zero range (0...999999 d). If ‘ZI’ is non-zero the device will perform an automatic Set-Zero when the weight stabilizes with the No-Motion settings and the weight is within the ‘ZI’... -
Page 35: Tn Set/Clear Non-Volatile Tare
EM100-F User Manual 0084293 5.2.15. TN Set/Clear Non-Volatile Tare This command sets the tare mode to volatile or non-volatile. Value range is 0 or 1; Factory default is 0 (volatile). If set to 1 (Non-Volatile), every set/clear tare will write the value directly to non- volatile memory. -
Page 36: Ag Absolute Gain Calibration (Ecal)
EM100-F User Manual 0084293 5.2.18. AG Absolute Gain Calibration (eCal) The command ‘AG’ is used as absolute gain (or measuring range) for all weight calculations and will setup in mV/V. Permitted values are ±33000 (±3.3000mV/V). Master Sends Slave Responds With... -
Page 37: Motion Detection Commands - Nr, Nt
EM100-F User Manual 0084293 5.3. Motion Detection Commands – NR, NT The motion detection facility provides a means of disabling certain functions whenever a condition of instability, or ‘motion’, is detected. The ‘no-motion’ or ‘stable’ condition is achieved whenever the signal is steady for the time-period set by ‘NT’, during which it cannot fluctuate by more than ‘NR’... -
Page 38: Filter Setting Commands - Fm, Fl, Ur
EM100-F User Manual 0084293 5.4. Filter Setting Commands – FM, FL, UR FIR or IIR Filters (selected with ‘FM’ command) are provided to eliminate most unwanted disturbances. The command ‘FL’ is used to define the filter settings, whilst the command ‘UR’ is used to define an averaging of up to 128 measurement values. - Page 39 EM100-F User Manual 0084293 Mode 0 (IIR Filter) Settings/Characteristics ‘FL’ Settling Time Cut-Off Attenuation Output Sampling Setting ms (0.1%) Frequency (Hz) at 200Hz (dB) Rate (samples/sec)* No Filtering 1200 >50 >65 >75 >80 >85 1160 >100 2350 >110 4500 0.25 >120...
-
Page 40: Ur Update Rate & Averaging
EM100-F User Manual 0084293 5.4.3. UR Update Rate & Averaging Depending on the selected filter mode this command defines an averaging for the output value. The permitted settings are from 0 to 7 (see table below). The average value is always calculated from measurement values. -
Page 41: Taring & Zeroing Commands - Sz, Rz, St, Rt, Sp, Tmv, Rmv
EM100-F User Manual 0084293 5.5. Taring & Zeroing Commands – SZ, RZ, ST, RT, SP, TMV, RMV The following commands allow you to set/reset the zero and tare values. The zero set up during calibration remains the ‘true zero’ but the new ‘current zero’ can be set up by using the ‘SZ’... -
Page 42: St Set Tare
EM100-F User Manual 0084293 5.5.3. ST Set Tare This command will activate the net weighing function by storing the current weight value as a tare value. The weight signal must be ‘stable’ within the limits set by ‘NR’ (No-Motion Range) and ‘NT’... -
Page 43: Rmv Reset Tare (Mv/V)
EM100-F User Manual 0084293 5.5.7. RMV Reset Tare (mV/V) This command resets the mV/V tare and the value returns to gross mode. Master Sends Slave Responds With Meaning Tare De-Activated/Gross Performed. RMV↵ Page 43 of 93... -
Page 44: Output Commands - Gg, Gn, Gt, Gs, Gmv, Gw, Ga, Gl, Of, Gh, Th, Gm, Rm, Go
EM100-F User Manual 0084293 5.6. Output Commands – GG, GN, GT, GS, GMV, GW, GA, GL, OF, GH, TH, GM, RM, GO, GV, HW Note: Several output commands refer to commands, timing plots or other related information can be found in future sections e.g. 5.12 Trigger Section. -
Page 45: Gw Get Data String (Net, Gross & Status)
EM100-F User Manual 0084293 5.6.6. GW Get Data String (Net, Gross & Status) Issuing the ‘GW’ command, which has no parameters, will return the net weight, the gross weight, the status and the checksum values, all combined into one single string in the format:... -
Page 46: Ga Get Triggered Average Value
EM100-F User Manual 0084293 5.6.7. GA Get Triggered Average Value This command reads the measurement result of a measurement cycle. The measurement value has been averaged according the defined measuring time. Master Sends Slave Responds With Meaning A+001.100 Request: 1100g. -
Page 47: Gh Get Hold Value
EM100-F User Manual 0084293 Output Format Parameter Setting Range Information Decimal Point in GW & GL Response 0 (Factory Default) E.g. when the range information is selected, the data strings will change from G+000000 to Gn+000000, where 1 ≤ n ≤ 3. -
Page 48: Go Get Peak-To-Peak Value
EM100-F User Manual 0084293 5.6.14. GO Get Peak-to-Peak Value The peak-to-peak value is the difference between the peak value and the valley value. Master Sends Slave Responds With Meaning O+091.100 Peak-to-Peak Value: 91100dec. GO↵ 5.6.15. GV Get Valley Value The valley value is the minimum value since the last Reset Peak ‘RM’ command was issued. -
Page 49: Auto-Transmit Commands - Sg, Sn, Sx, Smv, Sa, Sl, Sw
EM100-F User Manual 0084293 5.7. Auto–Transmit Commands – SG, SN, SX, SMV, SA, SL, SW The following commands allow the gross weight or net weight values to be continuously sent. Continuous transmission starts as soon as the relevant command has been issued and finishes when any valid command (The new command is executed by the EM100). -
Page 50: Send Data String Continuously (Average, Gross & Status)
EM100-F User Manual 0084293 5.7.6. SL Send Data String Continuously (Average, Gross & Status) Master Sends Slave Responds With Meaning L+00100+001005109 Average Value: +000100dec. (no decimal point). SL↵ (example). Gross Value: +001100dec. (no decimal point). Status bit 1: 5 (Not Used). -
Page 51: Commands For External I/O Control - In, Om, Io
EM100-F User Manual 0084293 5.8. Commands for External I/O Control – IN, OM, IO 5.8.1. IN Read Status of Logic Inputs Master Sends Slave Responds With Meaning IN:0000 Input 1 & 2 Low. IN↵ IN:0001 Input 1 High, Input 2 Low. - Page 52 EM100-F User Manual 0084293 The status of the outputs can be changed by issuing the ‘IO’ command with the appropriate 4-digit code e.g. IO 0001. The status of the logic outputs is normally determined by the internal set-points or manually setting the ‘IO’ and ‘OM’ (or ‘IM’) output mask.
-
Page 53: Set-Point Output Commands - S'n', H'n', A'n', Ht
EM100-F User Manual 0084293 5.9. Set-Point Output Commands – S’n’, H’n’, A’n’, HT Each logic output can be assigned to an independent set-point value (S’n’) with a corresponding hysteresis/switch action (H’n’) and allocation (A’n’ – source is the Gross, Net or Average weight). -
Page 54: A'n' Source Allocation For Set-Point
EM100-F User Manual 0084293 Master Sends Slave Responds With Meaning H0:+000001 Request: Setup Hysteresis of Set-Point S0. H0↵ Setup: Positive Hysteresis +100dec. for Set-Point S0. H0 100↵ H1:+000001 Request: Setup Hysteresis of Set-point S1. H1↵ Setup: Negative Hysteresis -5000dec. for Set-Point S1. -
Page 55: Communication Setup Commands - Ad, Na, Ns, Br, Dx, Cl, Op, Td, Ctr, Str, Sbr
EM100-F User Manual 0084293 5.10. Communication Setup Commands – AD, NA, NS, BR, DX, CL, OP, TD, CTR, STR, SBR Note: All changes to the communications commands must be stored in non-volatile memory using the ‘WP’ command. 5.10.1. AD Device Address – Serial Channel This command can set up the device address in the range from 0 to 255. -
Page 56: Br Baud-Rate - Serial Channel
EM100-F User Manual 0084293 5.10.4. BR Baud-Rate – Serial Channel The following Baud-rates can be setup: 9600, 14400, 19200, 38400, 57600, 115200, 230400 and 460800Baud. The data-rate will only be active when the new Baud-rate has been saved with the ‘WP’... -
Page 57: Td Transmission Delay
EM100-F User Manual 0084293 5.10.8. TD Transmission Delay This command allows equipment attached to the bus to reconfigure to and from receiver and transmitter. Time delays from 0 to 255ms are available before any response from the EM100 is sent. This delay may be necessary in some two wire applications (half-duplex). The delay is only applicable when ‘DX’... -
Page 58: Save Calibration & Setup Data Commands - Cs, Wp, Ss, Sdd
EM100-F User Manual 0084293 5.11. Save Calibration & Setup Data Commands – CS, WP, SS, SDD The calibration and setup parameters can be divided in 4 groups: Calibration: ‘CE’, ‘CM’n’’, ‘CI’, ‘MR’, ‘DS’, ‘DP’, ‘CZ’, ‘CG’, ‘ZT’, ‘FD’, ‘IZ’, ‘ZR’, ‘ZI’, ‘TM’, ‘TN’, ‘ZN’, ‘WT’’, &... -
Page 59: Sdd Save Dosing Setup Parameters
EM100-F User Manual 0084293 5.11.4. SDD Save Dosing Setup Parameters This command will save the ‘Dosing’ parameters to non-volatile memory. Master Sends Slave Responds With Meaning Request: Dosing Parameters Saved. SDD↵ Page 59 of 93... -
Page 60: Trigger Commands - Sd, Mt, Te, Tr, Tl
EM100-F User Manual 0084293 5.12. Trigger Commands – SD, MT, TE, TR, TL Note: All changes to the trigger commands must be stored in non-volatile memory using the ‘WP’ command. 5.12.1. SD Start Delay Time This command defines a time delay between the trigger and the start of the measurement. -
Page 61: Tr Software Trigger
EM100-F User Manual 0084293 5.12.4. TR Software Trigger This command starts a measurement cycle. Its execution can be compared to a hardware trigger on the digital input channel 1. Master Sends Slave Responds With Meaning Trigger Event. TR↵ Note: If a measurement cycle is already active, the unit will respond with ‘ERR’. -
Page 62: Filling Commands - Di, Sc, Ac, Gd, Dt, Pd1 To Pd21, Tr
EM100-F User Manual 0084293 5.13. Filling Commands – DI, SC, AC, GD, DT, PD1 to PD21, TR Note: All setups should be stored with the ‘SDD’ command before power-off. The filling process is controlled by the dosing parameters. The parameters are related to the sections shown in the filling cycle. - Page 63 EM100-F User Manual 0084293 The parameters for the filling process are read and set through the ‘Read/Modify Dose Parameter’ commands. The following commands enable the setup and control of the built-in filling controller program. The program assumes that the coarse filling valve is connected to Output 1 and the fine filling valve is connected to Output 2.
- Page 64 EM100-F User Manual 0084293 Filling Process The filling process is started by a ‘Start Cycle’ command from the gateway once the EM100 filling parameters have been loaded. Once started, the filling process can be either waiting for a trigger or be in the process of filling.
-
Page 65: Di Filling Status
EM100-F User Manual 0084293 5.13.1. DI Filling Status Issuing the ‘DI’ command will return a result in the format I:000 (only low byte). Master Sends Slave Responds With Meaning I:000 Request: Status Filling. DI↵ I:068 Status: Dose Program DI↵ Running, Tare Out of Range (No Filling). -
Page 66: Gd Get Last Dosed Weight
EM100-F User Manual 0084293 5.13.4. GD Get Last Dosed Weight Issuing the ‘GD’ command, will return the last dosed weight value in the format D+01.100. Master Sends Slave Responds With Meaning D+01.100 Request: Dosed Weight 1100 d. GD↵ 5.13.5. DT Get Last Tare Weight Issuing the ‘DT’... -
Page 67: Pd4 Delay Time Tare Average
EM100-F User Manual 0084293 5.13.9. PD4 Delay Time Tare Average Delay time (in ms) between the trigger pulse being applied to input 1 and the start of the tare averaging. Range: 0-65535ms. Master Sends Slave Responds With Meaning P4:+00200 Request: Delay Time=200ms. -
Page 68: Pd8 In-Flight Delay After Fine Valve Shut-Off
EM100-F User Manual 0084293 5.13.13. In-Flight Delay After Fine Valve Shut-Off After the fine valve shuts off, a weight peak may occur because of a surge or splash of the product being filled. Master Sends Slave Responds With Meaning P8+00100 Request: Delay Time=100ms. -
Page 69: Pd12 Tare Weight Tolerance
EM100-F User Manual 0084293 5.13.17. PD12 Tare Weight Tolerance Tare weight tolerance (in increments). This is the allowable deviation of the tare weight (bottle or box). If the tare weight value is outside this window the filling process will not start. -
Page 70: Pd15 Filling Weight
EM100-F User Manual 0084293 5.13.20. PD15 Filling Weight This is the target filling weight (in increments). Master Sends Slave Responds With Meaning P15+04000 Request: Filling Weight=4000d. PD15↵ Setup: Set Filling Weight=500d. PD15 500↵ Range: 0…99999 increments. Example: PD15 500 means total filled weight is 500.0g [when cal. 1kg=10,000 increments]. -
Page 71: Pd18 Filling Timeout
EM100-F User Manual 0084293 5.13.23. PD18 Filling Timeout The EM100 subtracts the various delays and average times (‘PD3’ to ‘PD9’) from the timeout period ‘PD18’ and uses the ‘remaining’ fill time and fill-weight to calculate a minimum filling slope. If the weight doesn’t stay between this minimum slope and twice the minimum slope the EM100 aborts... -
Page 72: Pd21 Bag Rupture Blanking
EM100-F User Manual 0084293 5.13.26. PD21 Bag Rupture Blanking The control of filling slope is disabled for ‘PD21’ milli-seconds from opening the coarse valves to allow oscillation on the weight during the first part of the filling. Master Sends Slave Responds With... -
Page 73: Canopen Interface
EM100-F User Manual 0084293 6. CANopen Interface 6.1. General Interface Specification Interface CAN2.0B Identifiers Used 11-bit Transmit and Receive Identifiers. Tolerates 29-bit Identifiers. Default Bit-Rate 500kBit/second. NMT Mode Slave. On start-up the EM100 waits for an NMT start message or SDO request before transmitting anything (Note: This does not conform exactly to the CIA standard). -
Page 74: Pdos
EM100-F User Manual 0084293 6.1.1. PDOs Once set to ‘Operational State’, the EM100 will produce TPDOs constantly (see table below). Depending on the data-rate set for the CANopen network, the high number of readings (>1200 per second) can exceed what can be consumed by the NMT master. Equally the update rate may be affected when there are multiple units on the network and/or lower communication speeds used. - Page 75 EM100-F User Manual 0084293 execute silently – no response is sent). RPDO3 Command Sent by CAN Master COB-ID Set Tare mV/V. Reset Tare mV/V. Node. 0x400- Stream Net mV/V. All execute silently – no response is sent. When other streaming (Net or Gross weight) is activated, mV/V is switched off.
-
Page 76: Tpdo Frame (Tpdo1, Tpdo2 & Tpdo3)
EM100-F User Manual 0084293 6.1.2. TPDO Frame (TPDO1, TPDO2 & TPDO3) Sent: CAN Slave Node CAN Master Node 32-bit 16-bit 8-bit 8-bit Weight Status (see table below) Status Values Indication 0x0001 Under Range 0x0002 Over Range 0x0008 Centre Zero... -
Page 77: Receive Pdos (Rpdo1, Rpdo2 & Rpdo3)
EM100-F User Manual 0084293 6.1.4. Receive PDOs (RPDO1, RPDO2 & RPDO3) Sent: CAN Master Node Slave Node RPDO1 A PDO1 received by the EM100 will execute a ‘single command’ selected by the bit set in the data frame (see below table) e.g. 0x0001 = Reset Zero. -
Page 78: Sdos
EM100-F User Manual 0084293 6.1.5. SDOs The CANopen SDO is a confirmed service, an over-run does not occur if the CANopen controller only communicates with the EM100 in the ‘Pre-Operational’ state. When an SDO has been received by the controller no further communication takes place until the service has been acknowledged (or a timeout occurs). -
Page 79: Communication Profile
EM100-F User Manual 0084293 6.2. Communication Profile Abbreviations used in tables: Read Only. Read/Write. Write Only. const Constant. Unsigned Integer 8-bit. UI16 Unsigned Integer 16-bit. UI32 Unsigned Integer 32-bit. REAL32 32-bit IEEE754 Floating Point. String. TPDO Transmit PDO. RPDO Receive PDO. - Page 80 EM100-F User Manual 0084293 100D Life Time Factor. Set by NMT master. 1010 Save Comms UI32 Save Comms Parameters. Segment 1014 COB_ID UI32 80h+NodeID. COMB_ID of the emergency Emergency object. Message. 1017 Heartbeat Time. UI16 Producer heartbeat time in ms.
- Page 81 EM100-F User Manual 0084293 1802 No. of Entries. Comms Parameters TPDO3. COB-ID of PDO. UI32 380H+NodeID. Transmission FFhex. Type. Inhibit Time. UI16 1hex. 1803 No. of Entries. Comms Parameters TPDO4. COB-ID of PDO. UI32 480H+NodeID. Transmission FFhex. Type. Inhibit Time.
- Page 82 EM100-F User Manual 0084293 6.2.1.2. Manufacturer Segment 6.2.1.2.1. Save Parameters Index Name Type Attribute Default Description Index Value 2004 No. of Entries. No. of Entries. Dummy. Not Used. Save Calibration Save Calibration Settings (TAC). Save General. Save General Settings. Save Dosing.
- Page 83 EM100-F User Manual 0084293 6.2.1.2.4. General Parameters Index Name Type Attribute Default Description Index Value 2100 No. of Entries. No. of Entries. Dummy. Not Used. Dummy. Not Used. Dummy. Not Used. Filter Setting. Filter Setting. Dummy. Not Used. Logic Outputs.
- Page 84 EM100-F User Manual 0084293 6.2.1.2.5. Bottle Filling Mode Parameters Index Name Type Attribute Default Description Index Value 2200 No. of Entries. No. of Entries. Pre-Fill Mode. Pre-Fill Mode. In-Flight Correction. In-Flight Correction. Time Zero Check. Average Time Zero Check. Time Delay Tare.
- Page 85 EM100-F User Manual 0084293 6.2.1.2.6. Calibration Parameters Index Name Type Attribute Default Description Index Value 2300 No. of Entries. No. of Entries. Absolute Gain. 20000. Absolute Gain Calibrate (TAC). Absolute Zero. Absolute Zero Calibrate (TAC). Calibrate Enable. Calibrate Enable (Enable TAC).
- Page 86 EM100-F User Manual 0084293 6.2.1.2.7. Dose Information Index Name Type Attribute Default Description Index Value 2400 No. of Entries. No. of Entries. Dose Info. UI16 Filling Status. 6.2.1.2.8. Set-Point Limits Index Name Type Attribute Default Description Index Value 2600 No. of Entries.
- Page 87 EM100-F User Manual 0084293 6.2.1.2.11. Data Access Index Name Type Attribute Default Description Index Value 2900 No. of Entries. No. of Entries. Gross Weight. Real32 Gross Weight. Net Weight. Real32 Net Weight. Tare. Real32 Tare. Dosed Weight. Real32 Dosed Weight.
-
Page 88: Canopen Frames
EM100-F User Manual 0084293 6.3. CANopen Frames A CANopen data telegram or frame is constructed as below. The EM100 uses expedited transfer only i.e. each communication is contained within one frame (not sent over several). For CANopen purposes an EM100 module is the ‘Server’ and CAN Master is the ‘Client’. -
Page 89: Overall Can Frame
EM100-F User Manual 0084293 6.4. Overall CAN Frame COB-ID Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Specifier Parameter Location Data Specifier Index Index Sub- Data Data Data Data Lo Byte Hi Byte... -
Page 90: Sdo Write
EM100-F User Manual 0084293 6.4.1. SDO Write Master node write filter located at Index 1017, Sub Index 4. Master Transmits Transmit master EM100 Request Index Index Sub- Data Data Data Data COB-ID 600H+Node ID Index EM100 Responds ACK Transmit EM100 Master... -
Page 91: Heartbeat Message
EM100-F User Manual 0084293 6.4.3. Heartbeat Message This is sent by an individual node when the heartbeat protocol is activated. It contains only one byte, indicating the NMT State. COB-ID NMT State 700 + Node ID. 0 = Boot-up. 4 = Stopped. -
Page 92: Sdo Abort Codes
EM100-F User Manual 0084293 6.4.5. SDO Abort Codes Abort Code (Hex.) Description 05030000 Toggle Bit not alternated. 05040000 SDO Protocol timed out. 05040001 Client server command specifier not valid. 05040005 Out of memory. 06010000 Unsupported access to an object. 06010001 Attempt to read a write only object. -
Page 93: Approved Applications
EM100-F User Manual 0084293 7. Approved Applications The term ‘Approved’ applies whenever the weighing application is intended to be used for ‘legal-for- trade’ weighing – that is, trade transactions and certain medical applications. Such applications are bound by the legal metrology regulations of the relevant governments around the world, most countries will comply with either the relevant ENs (Euro Norms) or the relevant OIML (Organisation Internationale de Métrologie Légale) recommendations.
Need help?
Do you have a question about the EM100-F and is the answer not in the manual?
Questions and answers