Table of Contents
Advertisement
Advertisement
Table of Contents

Summary of Contents for Unitree GO-M8010-6
- Page 1 GO-M8010-6 Motor User Manual V1.0 www.unitree.cc/cn...
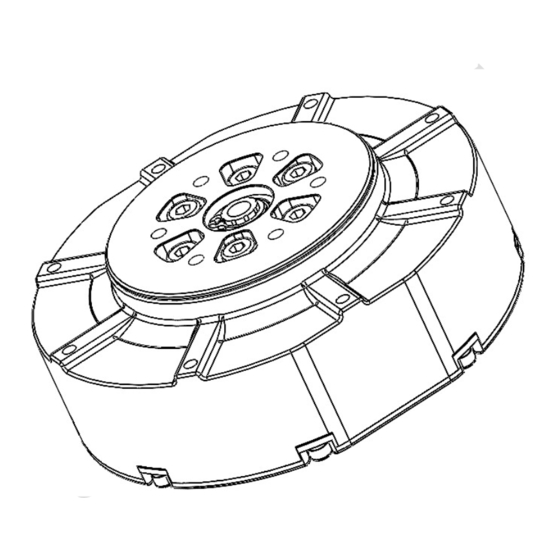
- Page 2 Catalogue Disclaimer ................................. 2 Symbol Description ............................2 Notes for Using ..............................2 Introduction ................................. 3 1. Specification and Parameters ........................3 2. Dimensional Drawing ..........................4 3. Electrical Connection Introduction ......................4 4. Specifications of Connectors ........................5 5. Performance Parameter ........................... 6 6.
- Page 3 Please strictly follow the manual to use this product. Unitree Robotics will not bear any liability for any loss caused by improper use, installation, and modification by users.
- Page 4 Communication Baud Rate 4Mbit/s Communication Control Frequency 6KHz Temperature Sensor Rotor Absolute Value Encoder 15bit Motor Sensory Feedback Torque, Angle, Angular Velocity, Temperature Motor Control Directive Torque, Angle, Angular Velocity, Temperature, Stiffness, Damping Usage Environment -5℃~40℃ © 2022 Unitree All Rights Reserved...
- Page 5 Figure (a) and (b) shown below are the electrical connection method: 485+ 120Ω 120Ω 485- XT30 XT30 XT30 Motor0 Motor1 Motor2 XT30 XT30 XT30 © 2022 Unitree All Rights Reserved...
- Page 6 4. Specifications of Connectors Model: XT30(2+2)-F Brand: AMASS Rated Current 20A MAX(16AWG) signal pin: 1A Contact Resistance ≤1.2mΩ Service Life 100 times Connector Dimensional Drawing: © 2022 Unitree All Rights Reserved...
- Page 7 GO-M8010-6 Motor User Manual 5. Performance Parameter Please use the Go motor reasonably according to the following performance parameters. FOC Controlled Characteristic Graph Moor Streamline Chart Motor Temperature Chart © 2022 Unitree All Rights Reserved...
- Page 8 In the actual use of the joint motor, attention need to be paid to the conversion of the control target amount of the motor output and the command of the motor rotor sent. For specific motor control manual, please refer to "Motor User Manual GO-M8010-6". Reserve the right to update the contents without prior notice.
Need help?
Do you have a question about the GO-M8010-6 and is the answer not in the manual?
Questions and answers