Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Related Manuals for Lord MicroStrain 3DM-GX4-25




Summary of Contents for Lord MicroStrain 3DM-GX4-25
- Page 1 LORD USER MANUAL ™ 3DM-GX4-25 Miniature Attitute Heading Reference System (AHRS)
- Page 2 © 2014 LORD Corporation ® MicroStrain Sensing Systems 459 Hurricane Lane Suite 102 Williston, VT 05495 United States of America Phone: 802-862-6629 Toll Free: 800-449-3878 Fax: 802-863-4093 http://www.microstrain.com sensing_support@LORD.com sensing_sales@LORD.com Copyright © 2014 LORD Corporation ™ ™ ™ ® ® ® ™...
-
Page 3: Table Of Contents
™ 3DM-GX4-25 Attitute Heading Reference System User Manual Table of Contents System Overview Sensor Overview 2.1 Components 2.2 Interface and Indicators Basic Setup and Operations 3.1 Software Installation 3.2 System Connections 3.3 Software Interface 3.3.1 Interactive Help Menu 3.4 Sensor Communication 3.5 Sensor Settings... - Page 4 ™ 3DM-GX4-25 Attitute Heading Reference System User Manual 5.2 Gyroscope Bias 5.3 Heading Drift and Compensation 5.4 Angular Rate and Acceleration Limits 5.5 Bandwidth 5.6 Platform Frame Transformation 5.7 Estimation Filter Operation 5.8 Estimation Filter Convergence 5.8.1 Initial Convergence 5.8.2 Bias Convergence 5.8.3 Output Uncertainty...
- Page 5 ™ 3DM-GX4-25 Attitute Heading Reference System User Manual 8.3 Technical Support Maintenance Parts and Configurations 10.1 Standard Configurations 10.2 Accessories 10.3 Warranty Information 10.4 Sales Support Safety Information References 12.1 Reference Documents 12.2 Glossary...
-
Page 6: System Overview
® as RS232 and USB. The LORD MicroStrain MIP Monitor software can be used for device ® configuration, real time measurement monitoring, and data recording. The LORD MicroStrain ® MIP Data Communications Protocol that is used to communicate with LORD MicroStrain inertial sensors is also available for users who want to develop customized software solutions. -
Page 7: Sensor Overview
® the LORD MicroStrain MIP Monitor software that is provided with system starter kits, and also ® available as a free download from the LORD MicroStrain website. Alternatively, users can write ® custom software with the LORD MicroStrain open source data communication protocol. The data is time-aligned and available by either polling or continuous stream. -
Page 8: Components
™ needed to begin using it. The starter kits include the 3DM-GX4-25 inertial sensor, a serial communications cable (either RS232 or USB), a power supply with country plug adapter (RS232 kits only), and all software, drivers, and documentation. ... -
Page 9: Interface And Indicators
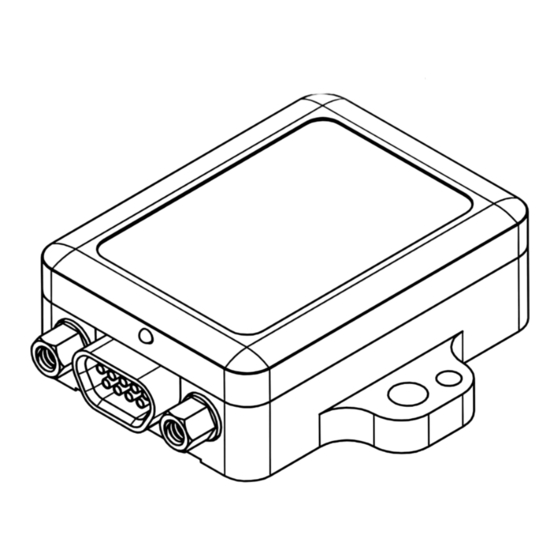
Attitute Heading Reference System Sensor Overview User Manual 2.2 Interface and Indicators ™ The 3DM-GX4-25 sensor interface is a dual use communications and power input connector. The sensor is mounted using the mounting and alignment holes as needed (see Sensor Mounting on page 42). -
Page 10: Basic Setup And Operations
To acquire sensor measurements and computed outputs, the 3DM-GX4-25 is used with a host ® computer capable of serial communication, and a software interface. The LORD MicroStrain MIP Monitor software is provided with the system and includes all functions needed for sensor ®... -
Page 11: Software Installation
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.1 Software Installation NOTE The MIP Monitor Software Suite includes hardware drivers required for all ™ 3DM-GX4 sensors. Sensors will not be recognized without these drivers. To install MIP Monitor Software Suite on the host computer, complete the following steps: 1. -
Page 12: System Connections
To acquire sensor data the following components are needed: 3DM - GX4 - 25 sensor, communication cable, power cable, as applicable for RS232 communications, and a host ® computer with access to the data acquisition software, such as LORD MicroStrain MIP Monitor. Figure 5 - System Connections... -
Page 13: Software Interface
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.3 Software Interface The MIP Monitor software includes a main window with system information and menus, a device settings window ( see Sensor Settings on page 15 ), and several data monitoring... -
Page 14: Sensor Communication
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.4 Sensor Communication Once power has been applied to the sensor, it is on. The sensor selects the appropriate serial communication (USB or RS232) on power- up based on which cable is connected. If the hardware drivers have been installed, communication can be established using the MIP Monitor software interface. -
Page 15: Sensor Settings
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.5 Sensor Settings Device settings are stored in the sensor memory. Only the configuration options that are available for the type of sensor being used will be available in the configuration menus. - Page 16 ™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual e. Help menu: Enable the context sensitive help menu for explanations of specific settings (see Interactive Help Menu on page 13). Figure 9 - Device Settings Menu...
-
Page 17: Saving Configurations
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.5.1 Saving Configurations Sensor settings are saved temporarily in the device memory by selecting the OK button in the Device Setup window. To save the settings for future use, select Settings > Save... -
Page 18: Data Monitoring And Recording
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.6 Data Monitoring and Recording NOTE During viewing and recording, only the outputs that are selected in the Message Format tabs in the Device Setup menu are displayed and recorded (see Sensor Settings on page 15). - Page 19 ™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual There are several data monitoring views available depending on what measurements are desired for monitoring and recording. Each view corresponds to one of the main categories in ™...
- Page 20 Microsoft Excel NOTE If the data is recorded in Binary format it will require a translation program that ® utilizes the LORD MicroStrain MIP Data Communications Protocol to make it user-readable. Figure 13 - Record Data 5.
-
Page 21: Viewing Data
™ 3DM-GX4-25 Attitute Heading Reference System Basic Setup and Operations User Manual 3.7 Viewing Data Acquired data is stored in either Binary (.bin) or Comma Separated Values (.CSV) format, depending on what was selected at the initiation of data recording. The files can be found in the directory specified at that time or in the default directory on the host computer desktop. -
Page 22: Sensor Measurements
User Manual Sensor Measurements ™ The 3DM-GX4-25 block diagram (Figure 15 - 3DM-GX4-25™ Block Diagram ) describes its primary hardware components and internal configuration. Integrated Micro-Electro-Mechanical ™ System (MEMS) sensors within the 3DM - GX4 - 25 are collectively known as the Inertial Measurement Unit (IMU) and include tri-axial gyroscopes (gyros), tri-axial accelerometers, tri-axial magnetometers, and a pressure altimeter. -
Page 23: Direct Sensor Measurements (Imu Outputs)
™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual 4.1 Direct Sensor Measurements (IMU Outputs) The sensors in an Inertial Navigation System (INS), from which measurements for navigation and orientation are obtained, are collectively know as the Inertial Measurement Unit (IMU). - Page 24 ™ Table 4 - IMU Measurements lists the IMU measurements available for the 3DM-GX4-25 Additional measurement units may be available in MIP Monitor for some outputs however they are converted values and do not represent the actual sensor outputs. Only actual output units are listed.
-
Page 25: Computed Outputs (Estimation Filter/Ahrs)
™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual 4.2 Computed Outputs (Estimation Filter/AHRS) ™ The computed outputs are measurements from the 3DM- GX4- 25 IMU sensors that are blended through an Adaptive Kalman Filter (AKF) algorithm. The Kalman Filter produces a better estimation of attitude and heading (AHRS) outputs than can be achieved by the inertial sensors individually. - Page 26 ™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual Measurement Units Description indicates the current state of the EF, Filter Status such as running or initializing GPS time corresponding to the cal- GPS Time weeks & seconds culated filter solution...
- Page 27 ™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual Measurement Units Description meters (altitude) altitude as derived from the U.S. Stand- pressure (milli-bars) ard Atmospheric Model (SAM) using the temperature (°C) sensed barometric pressure and air density (kg/m temperature...
-
Page 28: Sensor Reference Frames
™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual 4.3 Sensor Reference Frames 4.3.1 Geodetic Frame The World Geodetic System is the standard for cartography and navigation. The latest ™ revision, WGS84, is the reference coordinate system for GPS, and the 3DM- GX4-25 reports position using this coordinate frame. -
Page 29: North East Down (Ned) Frame
For most applications, this assumption is valid and provides a more intuitive reference frame for expressing velocity and attitude information than a global frame. ™ The 3DM-GX4-25 reports velocity in this frame and attitude with respect to this frame. Figure 19 -... -
Page 30: Sensor Frame
NED frame exactly, giving zero rotation. ™ The 3DM-GX4-25 reports acceleration, angular rate, delta-Theta, delta-velocity, inertial sensor biases and corrections in this frame when no sensor- to- platform frame... -
Page 31: Platform Frame
User Manual 4.3.4 Platform Frame ™ The 3DM-GX4-25 includes the option to define an orientation transformation and offset distance from the sensor frame to a user-definable platform frame. This is useful when the sensor cannot be mounted in the same location or orientation as the desired reference point on the platform frame. - Page 32 ™ 3DM-GX4-25 Attitute Heading Reference System Sensor Measurements User Manual In the MIP Monitor software the transformation and offset settings are entered in the Settings > Device > Estimation Filter > Mounting > Mounting Orientation and Mounting Offset fields (Figure 22 - Platform Frame Settings).
-
Page 33: Performance Optimization
However, often these sources are hard to avoid or are hidden. ™ When using the 3DM-GX4-25 magnetometer to aid in heading estimations, a field calibration of the magnetometer after final installation is highly recommended. This can be accomplished ®... - Page 34 ™ 3DM-GX4-25 Attitute Heading Reference System Performance Optimization User Manual platform in a neutral environment but one that still accounts for the platform itself in all orientations. Figure 23 - Collect Calibration Data 5. When all possible rotations are completed, select the Stop Streaming button next to...
- Page 35 ™ 3DM-GX4-25 Attitute Heading Reference System Performance Optimization User Manual 8. Cycle power to the sensor when prompted and then use the Refresh button, if needed, to re-establish communication with the sensor. 9. Start a calibration verification by selecting the Start Streaming Data button next to...
-
Page 36: Gyroscope Bias
™ 3DM-GX4-25 Attitute Heading Reference System Performance Optimization User Manual 5.2 Gyroscope Bias Gyroscope biases (offsets) can be zeroed out to set a baseline value for the static home position and conditions in the application. This should be done after sensor installation. -
Page 37: Heading Drift And Compensation
™ 3DM-GX4-25 Attitute Heading Reference System Performance Optimization User Manual Heading Drift and Compensation There are three options for the heading reference source: the magnetometer, an external reference, or none. If the setting is an external reference, the user has to provide a heading reference. -
Page 38: Angular Rate And Acceleration Limits
Most computer RS232 ports are limited to ™ 115,200 baud even though the 3DM-GX4-25 is capable of running at 921,600 baud. 5.6 Platform Frame Transformation... - Page 39 The magnetometer corrections can be disabled for applications where large, non-constant magnetic interference sources ™ exist, which would impair their use (such as when mounting the 3DM-GX4-25 on a gimbal close to the frame of a ground vehicle).
-
Page 40: Estimation Filter Convergence
5.8.3 Output Uncertainty ™ The 3DM-GX4-25 estimation data set includes a filter status field that contains a set of status flags. These flags pertain to high covariance values for attitude and inertial sensor parameters. These flags should be monitored and cross-check against the corresponding uncertainty fields when they appear. -
Page 41: Vibration Isolation
5.10 IMU Sensor Calibration ™ All of the sensor internal to the 3DM-GX4-25 are calibrated when it is manufactured and the calibration values are saved in the device memory. With the exception of the magnetometer field calibration (... -
Page 42: Sensor Installation
™ 3DM-GX4-25 Attitute Heading Reference System Sensor Installation User Manual Sensor Installation 6.1 Sensor Mounting ™ The 3DM- GX4- 25 sensor housing is rated for indoor use only, unless used inside of a protective enclosure. The sensor has two mounting tabs with holes for fastening. There are two additional holes used for precise alignment with 2mm dowel pins. -
Page 43: Oem System Integration
™ control systems that react to the sensor outputs. For these applications the 3DM-GX4-25 available as a stand-alone component with optional interface connectors. The communication protocol used for configuring and acquiring sensor data and estimations outputs is available for these applications as well. -
Page 44: Packet Builder
7.1.1 Packet Builder To expedite program development, a packet builder tool is included in the MIP Monitor ™ software. The packet builder allows users to send multiple packets to the 3DM-GX4-25 and view the resulting reply data. ™ Applicable protocol structure and design is described 3DM-GX4-25 MIP DCP Manual. -
Page 45: Sensor Direct Mode
The sensor direct mode allows programmatic access of the internal IMU which has its own processor and protocol commands. For more ® information about using this mode, contact LORD MicroStrain Technical Support (see Technical Support on page 53). -
Page 46: Sensor Wiring
® Sensor power and serial communications cables are available from LORD MicroStrain come with the sensor starter kits. These cables will have the micro-DB9 connector on one end (to connect to the sensor) and either a standard DB9 on the other end (for RS232 communication) or a USB connector (for USB communications). -
Page 47: Sampling On Start-Up
This technique will not work in MIP Monitor because it automatically puts the sensor in idle mode in order to allow device configuration. ® For more information refer to the "Startup Settings" Technical Note on the LORD MicroStrain ® website, or contact LORD MicroStrain... -
Page 48: Troubleshooting
™ 3DM-GX4-25 Attitute Heading Reference System Troubleshooting User Manual Troubleshooting 8.1 Troubleshooting Guide... - Page 49 (See Technical Support on page 53). 1.5 sensor is damaged If all power settings and connections have been verified, and ® the sensor is still unresponsive, contact LORD MicroStrain Technical Support (See Technical Support on page 53). 2.1 sensor not found in MIP Monitor 2.
- Page 50 ™ 3DM-GX4-25 Attitute Heading Reference System Troubleshooting User Manual Problem Possible cause and recommended solution sufficient time to detect it. See Software Installation on page 11 2.4 serial baud rate setting (not applicable to USB devices) The host computer serial port baud rate and the sensor baud settings must match in order for communication be established.
- Page 51 When data recording is started the user can choose between CSV and Binary output formats. If the data is recorded in Binary format it will require a translation program that utilizes ® the LORD MicroStrain MIP Data Communications Protocol to make it human readable. 3.6 sensor has been magnetized...
-
Page 52: Repair And Calibration
LORD MicroStrain within the warranty period. ® This warranty does not extend to any LORD MicroStrain products which have been subject to misuse, alteration, neglect, accident, incorrect wiring, mis- programming, or use in violation of operating instructions furnished by LORD ®... -
Page 53: Technical Support
Troubleshooting User Manual 8.3 Technical Support ® There are many resources for product support found on the LORD MicroStrain website including technical notes, FAQs, and product manuals. http://www.microstrain.com/support_overview.aspx For further assistance our technical support engineers are available to help with technical and applications questions. -
Page 54: Maintenance
™ 3DM-GX4-25 Attitute Heading Reference System Maintenance User Manual Maintenance ™ There are no user-serviceable parts on the 3DM-GX4-25 . Removing the device cover or disassembling in any way will void the product warranty. -
Page 55: Parts And Configurations
For the most current product information, custom, and OEM options not listed below, refer to ® ® the LORD MicroStrain website or contact the LORD MicroStrain Sales Department. Table 6 - Model Numbers describes the standard models available at the time this manual was published. - Page 56 Description Part Number 3DM-GX4-15 Starter Kit (RS232, +/-5g, 300°/sec) 6233-4221 3DM-GX4-15 Starter Kit (USB, +/-5g, 300°/sec) 6233-4241 3DM-GX4-25 Starter Kit (RS232, +/-5g, 300°/sec) 6234-4221 3DM-GX4-25 Starter Kit (USB, +/-5g, 300°/sec) 6234-4241 3DM-GX4-45 Starter Kit (RS232, +/-5g, 300°/sec) 6236-4221 3DM-GX4-45 Starter Kit (USB, +/-5g, 300°/sec)
-
Page 57: Accessories
The following parts are available for use with the 3DM-GX4 and some are included in sensor ® starter kits. For the most current product information refer to the LORD MicroStrain website or contact the Sales Department. See Sales Support on page ®... -
Page 58: Warranty Information
® use in violation of operating instructions furnished by LORD MicroStrain . It also does not extend to any units altered or repaired for warranty defect by ®... -
Page 59: Sales Support
30 days from the date of receipt for a full refund (excluding shipping and handling), as long as the product is unaltered and ® undamaged. Items can only be returned after LORD MicroStrain has issued an Return Material Authorization (RMA). Items must be packed to withstand ®... -
Page 60: Safety Information
This section provides a summary of general safety precautions that must be understood and ® applied during operation and maintenance of components in the LORD MicroStrain Inertial Sensor Products. Throughout the manual, ANSI Z535 standard safety symbols are used to indicate a process or component that requires cautionary measures. -
Page 61: References
References 12.1 Reference Documents ® Many references are available on the LORD MicroStrain website including product user manuals, technical notes, and quick start guides. These documents are continuously updated and may provide more accurate information than printed or file copies. ... -
Page 62: Glossary
™ 3DM-GX4-25 Attitute Heading Reference System References User Manual 12.2 Glossary A/D Value The digital representation of analog voltages in an analog-to-digital (A/D) conversion. The accuracy of the conversion is dependent on the resolution of the system electronics. Higher res- olution produces a more accurate conversion. - Page 63 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual ASTM (Association of Standards and Testing) A nationally accepted organization for testing and calibration of technological devices Attitude The orientaion of an object in space with reference to a defined frame, such as the North, East,...
- Page 64 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual Delta-Theta The time integral of angular rate expressed with refernce to the device local coordinate system, in units of radians. Delta-velocity The time integral of velocity expressed with refernce to the device local coordinate system, in units of g*second where g is the standard gravitational constant.
- Page 65 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual Inertial Measurement System Inclinometer Device used to measure tilt, or tilt and roll. Inertial Pertaining to systems that have inertia or are used to measure changes in inertia as in angular or linear accelerations.
- Page 66 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual North, East, Down. A geographic reference system Original Equipment Manufacturer Offset A non-zero output signal of a sensor when no load is applied to it typically due to sensor imper- fections. Also called bias.
- Page 67 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual system has 65536 bits. Root Mean Squared Roll In navigation roll is what occurs when a horizontal force is applied at a distance right or left from the center of gravity of the platform, causing it to move side to side with respect to the sensor or platform frame origin.
- Page 68 ™ 3DM-GX4-25 Attitute Heading Reference System References User Manual UTC (Coordinated Universal Time) The primary time standard for world clocks and time. It is similar to Greenwich Mean Time (GMT). Vector A measurement with direction and magnitude with refernce from one point in space to another Velocity The rate of change of position with respect to time.
Need help?
Do you have a question about the 3DM-GX4-25 and is the answer not in the manual?
Questions and answers