
Related Manuals for Autonnic A5022

Summary of Contents for Autonnic A5022
- Page 1 A5022 FLUXGATE COMPASS USER MANUAL A5022 manual 02.doc November 2012 Software releases: 1.2.3 31oct2012 Hardware versions: V3 26jun2012 Autonnic Research Ltd www.autonnic.com 1 of 12...
-
Page 2: Table Of Contents
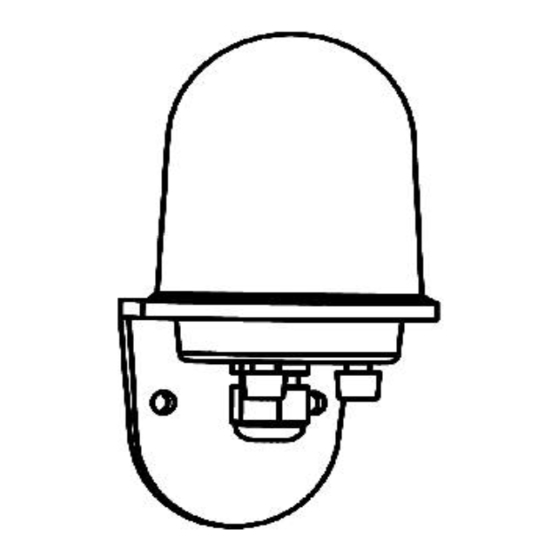
1. Introduction and description of fluxgate compass. 1.1 Description of compass. The Autonnic NMEA compass unit is a complete component for a compass indicating system, RADAR ‘North-up’ input or autopilot. It is housed in a water-resistant enclosure so it can be mounted outside a steel hull. -
Page 3: Connections
White NMEA IN+ Black Green NMEA OUT+ Blue Violet Furuno AD-10 Data Screen NOTE Conductors 5, 7 and 9 are connected together inside the A5022 1.2.2 Variants with suffix -CP Conductor Colour Type Function + Supply Yellow NMEA IN +... -
Page 4: Switches
Except for variants with suffix -S, two push-button switches are provided for calibrating the compass in the field. When the A5022 is viewed from the front face with the LED facing, then Switch 1 is on the right and Switch 2 is on the left. -
Page 5: Power Supply
Note that the output from the A5022 takes several seconds to stabilize after a power is applied; the time taken depends on the damping settings. There is a command - see section 5 –... -
Page 6: To A Pc Serial Port
Magnetic Heading, Deviation, and Variation. But note that the information of Deviation and Variation is not sent and so blank fields are defined by consecutive commas. In the A5022 the sentence may have one of several forms typically of the general form: $HCHDG,hhh.h etc Where hhh.h is the magnetic heading from 000.0 to 359.9 degrees... -
Page 7: Why The Compass Needs Calibrating
1/6 of a degree. At the same time the A5022 would be also sending the NMEA data to a precision of 1/10 of a degree. Clock Data Duration of data is 16 clocks each 480µs high =low=30µ s. Total = 480µs. -
Page 8: Setting Reference North Heading
NOTE that there should be a delay of at least 5 seconds after termination before a new calibration process is initiated. 4.4 Setting reference NORTH heading Switch 2 (and also a NMEA command) is provided to set ‘zero’. The A5022 should first be auto-calibrated then be aligned to North 4.5 Set-up suggestions... - Page 9 0183 input. Once configured, the compass will remember those settings every time it is powered up. Response: When any of the following input sentences are received the A5022 will reply with an ‘acknowledge’ output sentence of the format: $PATC,HCHDG,ACK<CR><LF> 5.1 Start Auto-Calibration $PATC,IIHDG,IAC<CR><LF>...
- Page 10 5.6 Set the internal filtering: ('damping') $PATC,IIHDG,DHD,ddd.d<CR><LF> Valid range for d is 0 to 100.0% 5.7 Enable LED: $PATC,IIHDG,ELED<CR><LF> Replies with the standard acknowledge sentence ($PATC,HCHDG,ACK<CR><LF>). Default: LED enabled. 5.8 Disable LED: $PATC,IIHDG,DLED<CR><LF> Replies with the standard acknowledge sentence ($PATC,HCHDG,ACK<CR><LF>). Note : LED will be automatically enabled during calibration process.
- Page 11 5.11 Configure the output sentence structure and type: $PATC,IIHDG,CFG,abc<CR><LF> [Replies with the standard acknowledge sentence $PATC,HCHDG,ACK<CR><LF>. ] Where 'a' is heading sentence type as follows: a=0 : $HCHDG,hhh.h,,,,<CR><LF> a=1 : $HCHDT,hhh.h,T<CR><LF> a=2 : $HCHDM,hhh.h,M<CR><LF> a=3 : $HCHCC,hhh.h<CR><LF> a=4 : $HEHDT,hhh.h<CR><LF> a=5: no heading data sent hhh.h is the compass heading in degrees...
-
Page 12: References
= checksum xxx.x = Rate of Turn in degrees per minute References A5022 data sheet NMEA-0183 specification Autonnic and the *A logo and Fluxgateworld are registered Trade Marks of Autonnic Research Ltd ©2006 - 2012 Autonnic Research Ltd Tollesbury Essex CM9 8SE www.autonnic.com...
Need help?
Do you have a question about the A5022 and is the answer not in the manual?
Questions and answers