Table of Contents
Advertisement
Advertisement
Table of Contents

Related Manuals for Unitree 4D LiDAR-L1


Summary of Contents for Unitree 4D LiDAR-L1
- Page 1 Unitree 4D LiDAR-L1 User Manual v 1.0 2023.04...
- Page 2 Download Document Click the following link to download the latest version of the user manual: https://www.unitree.com/en/download Download Unilidar Download Unilidar point cloud software via the following address: https://www.unitree.com/en/download Download Open-source Sdk Get the open-source SDK via the following address: https://www.unitree.com/en/download...
-
Page 3: Table Of Contents
Effective Field of View (FOV) Range Installation Precautions Installation Dimensions Usage Wiring Coordinate System Point Cloud Data Operation Status and Modes Unilidar Unilidar SDK Storage, Transportation, and Maintenance Storage Transportation Maintenance Troubleshooting After-Sales Warranty Information Parameter Specifications 2023 Unitree Robotics. All rights reserved. -
Page 4: Product Overview
Product Overview Introduction Unitree 4D LiDAR-L1 is a cost-effective, safe, and reliable 4D LiDAR (3D position + 1D grayscale) that can achieve high-speed laser ranging sampling at 21,600 times per second. It can be widely used in robotics, smart cities, smart toys, logistics, and other fields, supporting functions such as mapping, positioning, recognition, obstacle avoidance, environment scanning, and 3D reconstruction. -
Page 5: Working Principle
L1 are output from the communication interface. Schematic Diagram of Working Principle 2023 Unitree Robotics. All rights reserved. -
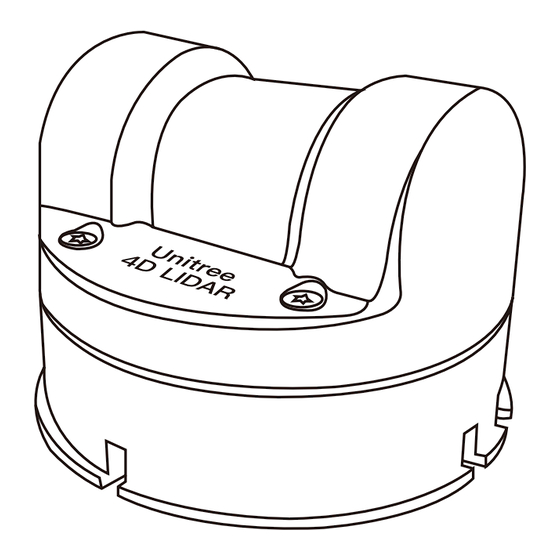
Page 6: Component Description
When designing a fixed bracket, the positioning point can be used to improve the overall posi- tioning accuracy. Please refer to the Installation Dimensions section for specific dimensions. M3 Mounting Hole The L1 can be fixed to a suitable position using M3 screws through this mounting hole. 2023 Unitree Robotics. All rights reserved. -
Page 7: Maintenance
Function Power Supply DC 12V power supply Power cable Ground Ground White Power cable Ranging core Input 3.3V Green Functional cable serial port input Ranging core Output 3.3V Black Functional cable serial port output 2023 Unitree Robotics. All rights reserved. -
Page 8: Installation
Please note that the point cloud density of the L1 varies in different FOV areas, with higher den- sity near the center. Please refer to the figure below for details. Point Cloud Density in Different FOV Areas of L1 2023 Unitree Robotics. All rights reserved. -
Page 9: Installation Precautions
When waterproofing is required for the usage scenario, the laser detection and ranging instru- ment needs an additional waterproof protective bracket. The schematic diagram of waterproof protection for both upright and inverted installation is as follows: Upright Installation Inverted Installation Waterproof Protection Schematic Diagram 2023 Unitree Robotics. All rights reserved. -
Page 10: Installation Dimensions
L1 size and mounting hole size diagram to install the L1 in the appropriate position. Unit: mm 4 x M3 22.5 22.5 Mechanical Dimensions of L1 Weight and Size of L1: Weight 230g Size 75 (W) x 75 (D) x 65 (H) mm 2023 Unitree Robotics. All rights reserved. -
Page 11: Usage
+Y axis pointing counterclockwise 90 ° from the +X axis. O-XYZ is the point cloud coordinate system of L1(The origin and XYZ coordinate system of the IMU can be found in the L1 3D model, and its XYZ axes are parallel to the point cloud coordinate system.) 360° Unitree 4D LiDAR-L1 Coordinate Definition... -
Page 12: Point Cloud Data
Unilidar or Unilidar SDK. The default mode for L1 when first used is the normal mode. If L1 loses power and is turned on again, it will revert back to the default normal mode. 2023 Unitree Robotics. All rights reserved. -
Page 13: Unilidar
By using Unilidar software, users can perform simple graphical debugging. Before using Unilidar, it is neces- sary to install the driver, which can be downloaded from www.unitree.com to view point cloud images. Unilidar currently supports Windows® (64-bit). -
Page 14: Storage, Transportation, And Maintenance
First, use a clean lens cleaning cloth to gently wipe the optical window. If there are still visible stains on the window, then use a small amount of alcohol on the cleaning cloth to gently wipe the window. 2023 Unitree Robotics. All rights reserved. -
Page 15: Troubleshooting
If there is a problem during use, please refer to the following table for solutions. If the problem cannot be resolved, please contact an authorized dealer of Unitree or Unitree. Problems Solutions · Confirm that all cables are correctly connected. -
Page 16: Parameter Specifications
8 mm IMU Sampling Rate 1kHz IMU Reporting Frequency 250Hz Attitude Perception Dimension 3-axis Accelerometer + 3-axis Gyroscope LED Ring Resolution 1° LED Ring Refresh Rate 11Hz Anti-Strong Light Ability 100Klux Operating Environment Temperature -10℃-60℃ 2023 Unitree Robotics. All rights reserved. - Page 17 The protective effect of L1 varies greatly under different installation angles. Please increase external protection according to the actual installation angle. Damage caused by improper installation or external protection is not covered by the warranty. The stable power and peak power under different environments are different. 2023 Unitree Robotics. All rights reserved.
- Page 18 This manual will not be notified separately if updated. You can check the latest version of the "User Manual" on the official website of Unitree. https://www.unitree.com/en/download Unitree is a trademark of Hangzhou Yushu Technology Co., Ltd. Windows is a registered trademark of Microsoft Corporation and its subsidiaries in the United States.
Need help?
Do you have a question about the 4D LiDAR-L1 and is the answer not in the manual?
Questions and answers