Table of Contents
Advertisement
Quick Links
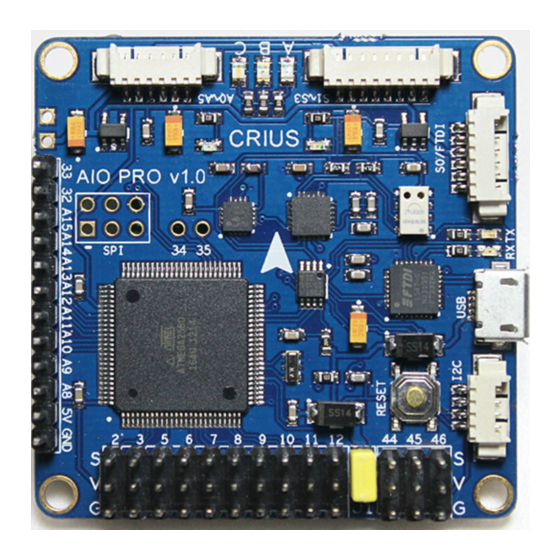
CRIUS ALL IN ONE PRO v1.0 Multi Rotor Flight Controller
Features:
·Supported MegaPirateNG and MultiWii firmware
·Up to 8-axis motor output
·8 input channels for standard receiver
·4 serial ports for debug/Bluetooth Module/OSD/GPS/telemetry
·2 servos output for PITCH and ROLL gimbal system
·A servos output to trigger a camera button
·6 Analog output for extend device
·A I2C port for extend sensor or device
·Separate 3.3V and 5V LDO voltage regulator
·ATMega 2560 Microcontroller
·MPU6050 6 axis gyro/accel with Motion Processing Unit
·HMC5883L 3-axis digital magnetometer
·MS5611-01BA01 high precision altimeter
·FT232RQ USB-UART chip and Micro USB receptacle
·On board logic level converter
·Match the standard of RoHS
Flight mode for Multiwii
·One of the following basic mode
- Acro
- Level
- Alt Hold
- Head Lock
·Optional mode
- HeadFree (CareFree)
- GPS Hold (Need GPS receiver or Extend Board)
- GPS Back to home position (Need GPS receiver or Extend Board)
Flight mode for MegaPirate
·Acro
·Alt Hold
·Simple
·Loiter (uses GPS)
·Guided (uses GPS)
·Position (uses GPS)
·Circle (uses GPS)
·RTL (uses GPS)
·Auto(uses GPS)
- Follow Me(uses GPS)
Manual rev 1.1
1 |
P a g e
Advertisement
Table of Contents

Subscribe to Our Youtube Channel
Summary of Contents for CRIUS ALL IN ONE PRO
- Page 1 CRIUS ALL IN ONE PRO v1.0 Multi Rotor Flight Controller Manual rev 1.1 Features: ·Supported MegaPirateNG and MultiWii firmware ·Up to 8-axis motor output ·8 input channels for standard receiver ·4 serial ports for debug/Bluetooth Module/OSD/GPS/telemetry ·2 servos output for PITCH and ROLL gimbal system ·A servos output to trigger a camera button...
- Page 2 Motor connection -MultiWii : D2/D3/D5/D6/D7/D8/D9/D10 -MegaPirateNG: D2/D3/D5/D6/D7/D8/D11/D12 External Power: if you don't power it by the BEC from the ESC Also needed to power Expansion Board. -cam pitch = input from RX -cam roll = same -aux4= same (aux port 1-4 u can see in the MultiWii config tool on PC) -aux3= same (aux port 1-4 u can see in the MultiWii config tool on PC) -aux2= same (aux port 1-4 u can see in the MultiWii config tool on PC) -aux1= same (aux port 1-4 u can see in the MultiWii config tool on PC)
- Page 3 Extend Board for ALL IN ONE PRO Features: ·Included U-blox LEA-5H GPS Module and Xbee socket. ( Been advise this will now be LEA-6H GPS module) ·Working with AIO PRO FC, provides full UAV functionality. ·2 separated 3.3V LDO voltage regulator ·25X25mm active GPS antenna with 200mm cable...
- Page 4 #endif then add this to "boards and sensor definitions" in config.h #define CRIUS_AIO_PRO_V1 // Crius Multiwii AIO PRO v1.0 Megapirate These settings are all in APM_Config.h you will see this tab when you load the Attitude.pde file in the MegaPirateNG/ArduCopter folder.
Need help?
Do you have a question about the ALL IN ONE PRO and is the answer not in the manual?
Questions and answers