pitsco TETRIX Programming Manual
Hide thumbs
Also See for TETRIX:
- Teachers manual (36 pages) ,
- Creator's manual (23 pages) ,
- User & technical manual (22 pages)
Advertisement
Quick Links
Advertisement

Related Manuals for pitsco TETRIX



Summary of Contents for pitsco TETRIX
- Page 1 TETRIX® myRIO Programming Tools for LabVIEW™ 44678...
- Page 2 No part of this product or related documentation may be reproduced in any form by any means without prior written authorization of Pitsco, Inc. All other product names mentioned herein might be the trademarks of their respective owners.
-
Page 3: Preparing Files
Also included in the .zip file is a LabVIEW project with several code examples demonstrating how to use the VI tools using LabVIEW and myRIO to control TETRIX DC motors and servos. If you are new to LabVIEW and... - Page 4 Package Manager software is installed, double-click the VI Package file once more to start the installation of the tools. Follow the prompts on the screen to complete the installation. After the installation is finished, the installed TETRIX myRIO programming VIs can be located on the LabVIEW functions palette.
-
Page 5: Connecting Controllers
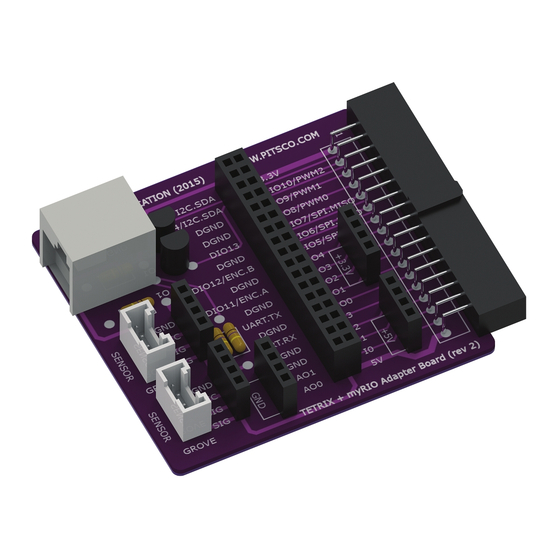
Connecting controllers The TETRIX motor expansion controllers connect via the Pitsco adapter to the i2C bus of the myRIO controller. The motor controllers are connected in a daisy chain hookup with the first controller in the chain designated as Position 1. Subsequent controllers are set to Positions 2, 3, and 4. - Page 6 A DC-barrel-jack-to- terminal adapter is included in each WRO TETRIX myRIO bundled set. To connect power, attach a red jumper wire between the positive terminals on the motor controller battery terminal strip and the DC barrel jack adapter, and then attach a black jumper wire between the negative terminals on the motor controller and DC barrel jack adapter.
-
Page 7: Section 1: Dc Motor Expansion Controller Vis
Smaller VIs can be combined to create larger VIs. The following blocks are smaller VIs created specifically to access the TETRIX motor expansion controllers and will be used to create larger VIs that control your robots. The bullets are terminal inputs and outputs that define the paramenters of the VI. - Page 8 The maximum speed that can be set depends on the type of rpm and gearing of the motor. For best constant-speed PID performance, a maximum speed setting of about 75% of the full motor rpm rating is recommended. For the TETRIX TorqueNADO™ motor, the maximum constant speed parameter is approximately 450 degrees per second.
- Page 9 • Select Channel – This selects Motor 1 or Motor 2. • Encoder Units – This sets the target units as either degrees or encoder counts. For the TETRIX TorqueNADO motor encoder, 1 encoder count is equal to 1/4 degree. When using encoder counts, 1,440 counts equal 360 degrees, or one full motor shaft revolution.
- Page 10 The default ID# for the DC motor expansion controller is 1. • Encoder Units – This sets the target units as either degrees or encoder counts. For the TETRIX TorqueNADO motor encoder, 1 encoder count is equal to 1/4 degree. When using encoder counts, 1,440 counts equal 360 degrees, or one full motor shaft revolution.
- Page 11 TETRIX Read Motor Busy Status Returns the busy status of the selected DC motor channel. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 12 • Select Encoder – This selects Encoder 1 or Encoder 2. • Encoder Output – This returns the selected encoder count output data. For TETRIX DC motors and encoders, 1 count is equal to 1/4 degree of motor shaft rotation. For example, 1,440 encoder counts equal 360 degrees of motor shaft rotation.
- Page 13 TETRIX Set Motor Invert State Inverts the rotation direction of the selected DC motor channel. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 14 TETRIX Read DC Controller’s Battery Voltage Returns the battery pack voltage powering the expansion controller. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 15 TETRIX Set DC Controller i2C address/ID# Sets or changes the connected expansion controller’s ID#/i2C address. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
-
Page 16: Section 2: Servo Motor Expansion Controller Vis
TETRIX Reset DC Expansion Controller with WDT Timeout Triggers a watchdog time-out reset of the expansion controller at the wired ID#/i2C address. When called, the controller firmware will reset after 15 ms. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected •... - Page 17 TETRIX Set Servo Speed Sets the speed of a selected servo motor channel. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 18 TETRIX Set Servo Position(s) Simultaneously sets the angular position of each servo motor channel. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 19 TETRIX Set Continuous Rotation Servo State Sets the rotational motion of a continuous rotation (CR) servo. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected • Error/Flow In – program execution flow in from previous VI block •...
- Page 20 Error/Flow In Error/Flow Out Controller ID# Found TETRIX Set the i2C address/ID# of Expansion Controller Sets or changes the connected expansion controller’s ID#/i2C address. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected •...
- Page 21 Error/Flow In Error/Flow Out Controller ID# (i2C Address) TETRIX Reset Servo Controller with WDT Timeout Triggers a watchdog time-out reset of the expansion controller at the wired ID#/i2C address. When called, the controller firmware will reset after 15 ms. • myRIO MXP Port A/B – the myRIO MXP port to which the adapter board is connected •...
- Page 22 TETRIX® MAX TorqueNADO™ Motor 44260 • Take your TETRIX® robots to the next level with a stronger 12-volt DC motor with 100 rpm and 700 oz-in. of torque. • Designed with a built-in, high-resolution Hall effect encoder for precise motor control •...
- Page 23 Change DC Expansion Controller ID Address Change Servo Expansion Controller ID Address Move Servo and Set Speed...
- Page 24 Run Continuous Rotation Servo Move Servo Read Servo Position...
- Page 25 Run DC Motor Constant Speed Run DC Motor Power Run Both DC Motor Powers...
- Page 26 Notes...
- Page 28 TETRIX® myRIO Programming Tools for LabVIEW™ Call Toll-Free Visit Us Online at 800•835•0686 Pitsco.com...
Need help?
Do you have a question about the TETRIX and is the answer not in the manual?
Questions and answers