Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Summary of Contents for Kanardia Boxi II
- Page 1 Boxi II — Manual © Kanardia d.o.o. February 2022 Revision 2.1...
- Page 3 3.0/. In short, the license gives you right to copy, reproduce and modify this document if: ˆ you cite Kanardia d.o.o. as the author of the original work, ˆ you distribute the resulting work only under the same or similar license to this one.
- Page 4 Boxi II – Manual Revision History The following table shows the revision history of this document. Rev. Date Description April 2021 Initial release February 2022 Added configuration section, corrected relay connections. © Kanardia 2006-2021...
-
Page 5: Table Of Contents
Boxi II – Manual CONTENTS Contents 1 Introduction 1.1 General Description ......1.2 Technical Specification ..... . . - Page 6 Boxi II – Manual CONTENTS 5 Configuration 5.1 Overview ......5.2 Outputs .......
-
Page 7: Introduction
This manual describes the technical description of the unit, installation and operation. There are two hardware versions of Boxi device: Boxi and BoxiII. This manual is for Boxi II version only. Boxi II units are shipped from May 2021. General Description Boxi is an electrical actuator control box. -
Page 8: Control Logic
Boxi II – Manual 2.1 Control Logic Description Value Weight 93 g Size 100 x 76 x 21 mm Operational voltage 6 to 36 V Power consumption 0.45 W Current 36 mA @ 12 V PTT Outputs Solid-State relay, max. 50V/0.5A Motor Outputs MOSFET full-bridge, max 36V/1.5A... -
Page 9: Analog Input
Boxi II – Manual 2.3 Analog Input Analog Input Analog input consist of two analog inputs and a reference voltage input/output. It is able to measure voltage from various sensors used for detecting trim and/or flap position. Boxi outputs a weak reference voltage to be used with simple resistor divider sensors (potentiometer). -
Page 10: Trim 1 And Trim 2
The switching is fast and at fixed frequency. With change of PWM duty cycle the soft start of motor is realized in Boxi II. On figure 1 the idea of soft start is presented. On keypress on Joyu the Trim output starts switching with cycle period. -
Page 11: Installation & Maintenance
Boxi II – Manual 3. Installation & Maintenance it reaches the Max PWM. The transition time from Start to max is marked as Time To Max. On figure 1 the Start PWM is 30%, the Max PWM is 100%. Time To Max... -
Page 12: Connections
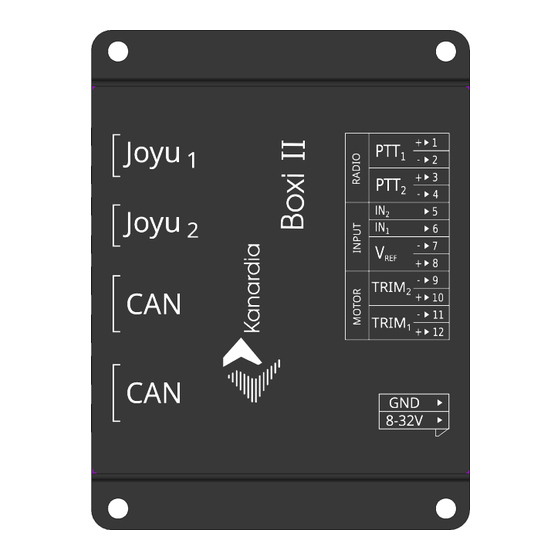
Boxi II – Manual 4. Connections Figure 2: Device mounting dimensions. Note: Figure is not in scale. Connections Boxi connects different devices together to ease the installation. Figure 3 illus- trates connection of standard devices to Boxi. Power Boxi shall be connected to the aircraft power supply. Because Boxi controls essential devices like PTT for the radio it should get a power supply as soon as the master switch of the aircraft is turned on. -
Page 13: Can
5A. Boxi must be connected to primary CAN bus in order to control any supported Kanardia device via Joyu (refer to Figure 3). Use standard RJ45 ethernet cable to connect it with other Kanardia devices. -
Page 14: Joyu 1 And Joyu 2
Boxi II – Manual 4.3 Ptt 1 and Ptt 2 and the other end of cable must be connected to aircraft electrical supply (blue to GND and red to +12 V). This cable shall be used only if BLU is used and no other device is powering the main CAN bus. -
Page 15: Two Microphones
Boxi II – Manual 4.4 Trim 1 and Trim 2 4.3.2 Two Microphones When two microphones are connected to the radio, the radio must distinguish between microphone in use. Radio will open microphone for which the button is pressed and suppressed the other one. So, two switches are needed in Boxi, Ptt1 and Ptt2. -
Page 16: High Current Motor
Boxi II – Manual 4.4 Trim 1 and Trim 2 TRIM TRIM Figure 6: Connection example for controlling external relay. of connecting DC-motor (trim actuator), figure 7b illustrates an example of connecting two light bulbs. TRIM TRIM TRIM TRIM (b) Two independent loads. -
Page 17: Position Input
Figure 8: Connection of external relay for driving high current motor. Position Input The Boxi II includes also two analog inputs for position sensors. Most of the position sensors are simply variable resistors - potentiometers, which work as a voltage divider. The voltage divider must be connected to a voltage source which we will refer to as a reference voltage. -
Page 18: External Reference
Boxi II – Manual 4.5 Position Input to figure 9 for detailed connection example. TRIM TRIM min 10 kOhm Figure 9: Position sensor with internal reference. However with this connection it is not possible to connect any external position display to the same sensor. -
Page 19: No Reference
Boxi II – Manual 4.6 Ray Allen T2/T3 Trim Motor 4.5.3 No Reference If the voltage on the position sensor is stabilised via some sort of voltage regu- lator it is not necessary to connect + input. However must still be connected. -
Page 20: Configuration
Boxi II – Manual 5. Configuration GREEN ORANGE BLUE TRIM Ray Allen WHITE TRIM T2/T3 WHITE Figure 12: Connection of Ray Allen T2/T3 servo as Trim 1. Configuration The Boxi device can be easily configured with any Nesis/Aetos type of device with at least software version 3.8.5. -
Page 21: Outputs
Boxi II – Manual 5.2 Outputs Outputs The output type can be selected when operator selects one of the output chan- nels. There are two types of output behavior present: Pwm and Split. De- pending on the selection of the type different options are shown. -
Page 22: Inputs
Boxi II – Manual 5.3 Inputs Figure 15: Configuration dialog for Split type of output. Inputs In Boxi configuration dialog also the input channel configuration can be done. After selecting appropriate channel the action dialog is shown as on figure 16. - Page 23 Boxi II – Manual 5.3 Inputs 4. Filter - Time constant for internal digital filter. It controls how fast the input reacts to sensor changes. Figure 17: Configuration dialog for Input channel. 5.3.2 Min/Max In Min/Max dialog the values that represent limiting values of the sensor shall be set.
-
Page 24: Status
Boxi II – Manual 5.4 Status Status Within Boxi configuration dialog as on figure 13 the status of Boxi can be monitored. 1. Power consumption of Joyu 1 and 2 ports. 2. State of Ptt1 and Ptt 2 outputs. The 0% means open contact, 100% means closed contact. -
Page 25: Repair
Boxi II – Manual 6. Repair Repair The Boxi has no serviceable parts inside. In the case of malfunction, it must be sent to factory for a repair. © Kanardia 2006-2021... -
Page 26: Limited Conditions
(1) or (2) is not possible (as determined by Kanardia in its sole discretion), (3) refund the purchase price of the product. When a refund is given, the product for which the refund is provided must be returned to Kanardia and becomes Kanardia’s property. - Page 27 Warranty. Refer to the licensing agreement accompanying such software for details of your rights with respect to its use. This warranty does not apply: (a) to damage caused by use with non-Kanardia products; (b) to damage caused by accident, abuse, misuse, flood, fire, earth- quake or other external causes;...
-
Page 28: 7.2 Tso Information
Kanardia products and any failure to maintain the confidentiality of data stored on the product. Under no circumstances will Kanardia be liable for the provision of substitute goods or services. Kanardia disclaims any rep- resentation that it will be able to repair any product under this warranty or make a product exchange without risk to or loss of the programs or data.
Need help?
Do you have a question about the Boxi II and is the answer not in the manual?
Questions and answers