Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Summary of Contents for Base Line ParaDrone
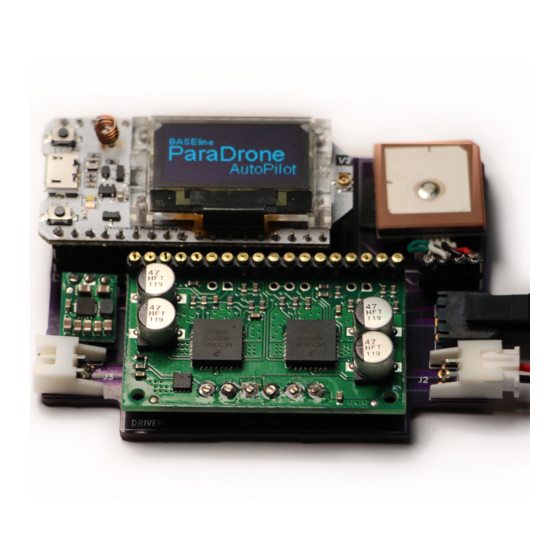
- Page 1 ParaDrone Flight Operations Manual 2021 Rev 1 BASEline Flight Computer...
- Page 2 Notice: You are entirely responsible for your own safety and compliance with regulations. ParaDrone is a free, open-source, community project. No warranty is provided on software or hardware for any purpose. Paragliding, powered paragliding, and parachuting are all inherently dangerous activities.
- Page 3 Chapter 1: Setup Chapter 2: Autopilot Planner Chapter 3: Remote control Remote control device Remote control protocol Bitfields Chapter 4: Flight procedures Pilot procedures Groundcrew procedures Remote control Chapter 5: Assembly Materials Autopilot Remote control Tools Cost Motors Printed Circuit Board Software Appendix A: Board layout...
-
Page 4: Chapter 1: Setup
Autopilot will not make any turns below 15m. It will begin flaring at 6m above ground level. If GPS signal is lost for X seconds, ParaDrone will enter a slow right-hand spiral. This is to keep it from flying far away from the LZ in case of lost signal. -
Page 5: Chapter 3: Remote Control
The remote control device is just a ESP32 microcontroller with LoRa and bluetooth radios. A 3d printed case is included in the ParaDrone project files, but is not strictly necessary. The case includes two variations: with and without a battery. If you don’t include a battery, you will need to... -
Page 6: Remote Control Protocol
Remote control protocol ParaDrone uses the following commands when communicating between the autopilot and remote control. The same messages are used on bluetooth and LoRa. Each message type is identified by a letter: ● C: Motor config ● L: Location update ●... -
Page 7: Chapter 4: Flight Procedures
Stay altitude aware! Paraglider jumps often end up low! If in doubt: can always land with glider In flight and under canopy Stay aware of ParaDrone above you. If it went unstable on exit, it may be spiraling down at high speed Groundcrew procedures... - Page 8 Battery levels Receiving LoRa data Landing zone set RC control check: left turn, right turn, flare Wind check Landing direction Wind limits Pre-jump Audio comm check Confirm drop location and altitude Landing zone set Wind check Give all-clear Jump run Watch jumper Watch for instability or entanglement of glider on exit Monitor flight telemetry data...
-
Page 9: Chapter 5: Assembly
Chapter 5: Assembly ParaDrone is an open source, community driven project. I do not sell ParaDrones. The design is intended to be easy to build for any maker. Many of the components can be substituted with no problem. The battery and motors can be changed as long as there is enough power to pull the toggles. - Page 10 Materials Autopilot Item Cost Grams Count Total Cost Total grams 12V DC 200RPM Gear Box Motor $20.00 320.0 $40.00 640.0 37mm metal motor bracket $2.50 22.5 $5.00 45.0 RSL snap shackle $3.00 12.8 $6.00 25.6 3D printed actuator $0.50 11.0 $1.00 22.0 3D printed motor bracket...
- Page 11 ● LiFePO4 battery charger ● 3D printer Cost If you have all the necessary tools, it’s pretty easy to assemble a ParaDrone for under $250 USD. The majority of the cost is: uxcell 12V DC 200RPM Gear Box Motor (x2) $40.00...
- Page 12 2. Solder limit switch with 15cm wires on NC (normally closed) pins. 3. Solder wires between battery holder and molex connector. 4. Glue eyelet and limit switch to 3d printed actuator. 5. Glue spool pieces together and tie fishing line to spool.
- Page 13 6. Screw motor bracket to board. Screw motor to motor bracket with 2 screws. 7. Screw actuator to motor using 4 remaining screws. 8. Thread fishing line out the top, and press the spool onto the motor shaft (glue if needed). 9.
- Page 14 Heltec ESP32 LoRa Pin 17 Driver M2_IN1 Pin 2 Driver M2_IN2 Pin 23 Driver M1_IN1 Pin 22 Driver M1_IN2...
- Page 15 ESP32 pin 13 TX out white ESP32 pin 32 Pololu Voltage Regulator S7V7F5 Driver VIN Ground VOUT ESP32 +5V, GPS +5V Software Source code is available from https://github.com/platypii/ParaDrone Use PlatformIO to install software on the ESP32 board. To program the ESP32:...
- Page 16 Install Visual Studio Code and PlatformIO. Open the project in the arduino directory of the git repository. Connect ParaDrone to the computer by USB. Use the PlatformIO "Upload" function to program the device.
-
Page 17: Appendix A: Board Layout
Appendix A: Board layout Use this template to accurately drill mounting holes in your board.
Need help?
Do you have a question about the ParaDrone and is the answer not in the manual?
Questions and answers