Advertisement
Quick Links
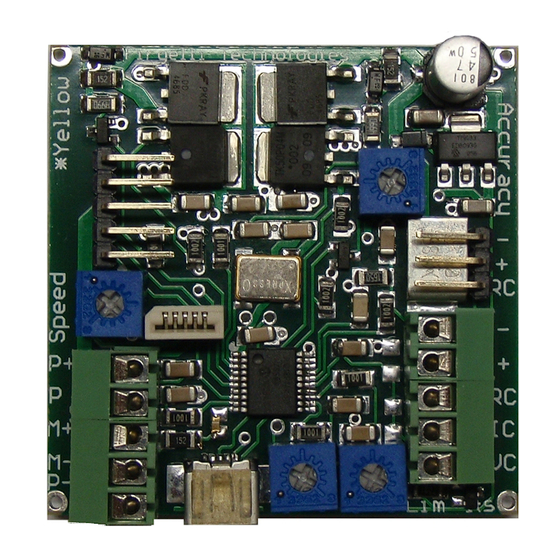
USB Control and Configuration of the
LAC
(Linear Actuator Control Board)
Compatible Products:
LAC
L12-SS-GG-VV-P
L16-SS-GG-VV-P
PQ12-GG-VV-P
P16-SS-GG-VV-P
T16-SS-GG-VV-P
This note provides further information regarding the Linear Actuator Control
board, with the intent to allow custom computer control and configuration.
Advertisement

Subscribe to Our Youtube Channel
Summary of Contents for Actuonix LAC
- Page 1 USB Control and Configuration of the (Linear Actuator Control Board) Compatible Products: L12-SS-GG-VV-P L16-SS-GG-VV-P PQ12-GG-VV-P P16-SS-GG-VV-P T16-SS-GG-VV-P This note provides further information regarding the Linear Actuator Control board, with the intent to allow custom computer control and configuration.
- Page 2 Manual Quick Start: The LAC board is static sensitive. Ensure your work area is static safe prior to removing the board from the static bag or optional housing. With all power and USB cables disconnected, connect an actuator to either the screw terminal header or the Actuonix connectors as described in the datasheet.
- Page 3 Apply power to the LAC board. If using the RC connector, do not connect a separate power supply. This can result in large currents flowing between power supplies. If you do wish to connect a separate supply, ensure the Red RC wire is disconnected.
- Page 4 Disable Defaults button. The entered values will then be retained even when power is cycled. To return to the default state, reconnect to the LAC Configuration Utility and press the Re-enable Defaults button.
- Page 5 Custom Windows Programs section of this document. Custom Control Programs: The supplied .dll file can be used to interface with the Actuonix LAC using a variety of Windows based programming languages, including Visual C++ and Labview. The standard functions are described in the mpusbapi.h file, while the LAC specific details...
- Page 6 0x0D SET_DERIVATIVE_GAIN 0x0E SET_AVERAGE_RC 0x0F SET_AVERAGE_ADC Note: Whenever a command is sent, the LAC will echo back the command. The exception is SET_POSITION, which returns the current position. 0x01 SET_ACCURACY: This is the value controlled by the Accuracy Potentiometer. A value between 0-1023 is accepted.
- Page 7 Distance × 1023 Stroke For example, to set the limits to 1mm from the end stop of a 30mm stroke actuator, set EXTEND_LIMIT to 34. × 1023= 34 0x04 SET_MOVEMENT_THRESHOLD This value determines the minimum actuator speed that is considered a stall. When the actuator speed drops below this value, the stall timer begins counting.
- Page 8 1023 will allow the actuator to achieve full speed. The actuator may exceed this value while attempting to overcome a stall condition. 0x0B SET_MIN_PWM_VALUE This is the minimum PWM value that can be applied by the PD control. 0x0C SET_Kp This is the constant for the proportional control term.
-
Page 9: Related Documents
Accordingly, the customer shall release and hold Actuonix harmless from and against any and all loss, liability, and damage incurred by the customer or any third party as a result of any information or recommendation provided to the customer or the customer's reliance on such information or recommendation.
Need help?
Do you have a question about the LAC and is the answer not in the manual?
Questions and answers