
Subscribe to Our Youtube Channel
Related Manuals for OTTO MOTORS 750 V2




Summary of Contents for OTTO MOTORS 750 V2
- Page 1 English OTTO 750 V2 - OMM-000096-A Operation and maintenance manual OMM-000096 Publication date Oct-23...
- Page 2 Copyright © 2023 CLEARPATH and OTTO Motors are trademarks of Clearpath Robotics Inc. All other product and company names listed are trademarks or trade names of their respective companies. The information provided herein is for general guidance only and is subject to change. For support, please...
-
Page 3: Table Of Contents
4.1. Included items ......................19 5. Applicable documents ......................21 6. In case of a collision ....................... 21 7. OTTO 750 V2 specifications ....................22 7.1. Size and weight ......................22 7.2. Speed and performance ....................23 7.3. Battery and power system ................... 23 7.4. - Page 4 OTTO 750 V2 - OMM-000096-A 8.13. LiDAR safety scanners ....................33 8.14. 3D perception cameras ....................34 8.15. Incremental encoders ....................34 8.16. Thermal detector ....................... 34 8.17. Swivel casters and drive wheels ................. 34 8.18. Attachment mounting and lift points ................35 8.19.
-
Page 5: Important Safety Information
OTTO 750 V2 - OMM-000096-A 1. IMPORTANT SAFETY INFORMATION The top priority of OTTO is the safety of its users. OTTO produces high power and fast-moving pieces of machinery that could cause serious injury, including death, if improperly used or maintained. Additional hazards may be identified and need to be addressed during the site-specific risk assessment. -
Page 6: General Hazards
OTTO 750 V2 - OMM-000096-A General hazards WARNING • BURN or SHOCK HAZARD! Never use this product if the enclosure or any of the connectors are broken, cracked, open, or show any other indication of damage. • SHOCK HAZARD! Always perform the lock-out/tag-out procedure at the facility or on the product before inspecting, servicing, cleaning, removing components, or opening any enclosure. -
Page 7: Robot Hazards
OTTO 750 V2 - OMM-000096-A Robot hazards WARNING • Always use level rigging when lifting or lowering the product. • IMPACT HAZARD! Never bypass the drive wheels of the robot while on a sloped surface. • Never use OTTO products to transport people or live animals. -
Page 8: Charger Hazards
OTTO 750 V2 - OMM-000096-A CAUTION • IMPACT HAZARD! Always maintain a safe distance from a robot in operation. A robot being operated in manual mode should only be operated by personnel who have been trained and authorized according to the standards of the facility in which the robot is in use. -
Page 9: Hazard Labels
OTTO 750 V2 - OMM-000096-A WARNING • FIRE OR SHOCK HAZARD! Never use a power cord or cable that appears damaged. • SHOCK HAZARD! Automatic chargers are powered by hazardous voltage levels. Do not touch the charge contacts when the product is in operation. - Page 10 OTTO 750 V2 - OMM-000096-A Label Title Description Label Title Description Grounding Improper grounding Pinching risk Keep hands and other electrical of OTTO chargers can objects clear of pinch hazard result in a potential points at all times. shock risk.
-
Page 11: Safety Awareness
OTTO 750 V2 - OMM-000096-A 1.3. Safety awareness WARNING • IMPACT HAZARD! Always maintain a safe distance from a robot in operation. A robot being operated in manual mode should only be operated by personnel who have been trained and authorized according to the standards of the facility in which the robot is in use. -
Page 12: Facility Conditions
OTTO 750 V2 - OMM-000096-A Facility conditions WARNING • IMPACT HAZARD! Never bypass the drive wheels of the robot while on a sloped surface. • CRUSH or IMPACT HAZARD! Keep low profile objects that the LiDAR cannot detect, such as forklift tines and pallets, outside of the robot's path. For sensor layouts, refer to the Component Overview section of the robot operation and maintenance manual. -
Page 13: Payload Maximums And Stability
OTTO 750 V2 - OMM-000096-A • Robots rely on LiDAR to protect personnel from crushing or collision hazards. Although rare, very reflective or very light absorbent (eg. black) material can impede the LiDAR safety systems. Avoid the use of such materials in clothing or obstacles to assist their detection by OTTO LiDAR safety systems. -
Page 14: Battery Handling
OTTO 750 V2 - OMM-000096-A Battery handling WARNING • FIRE HAZARD! If the battery is damaged or a battery fire occurs, contact local emergency services and vacate the area. Do not use water to douse the fire. • SHOCK HAZARD! Improper use or maintenance of robot batteries may result in a high energy discharge. -
Page 15: Safety System Functionality
OTTO 750 V2 - OMM-000096-A • Ideally, installed flaps should touch the floor; however, in instances where the flap can't be installed that close to the floor, the distance between the flap's bottom edge and the floor should not exceed 75 mm. -
Page 16: Emergency Stop System
OTTO 750 V2 - OMM-000096-A Refer to the specific AMR's sensor layout documentation for details on sensor scanning areas, angles, and dimensions. Credentialed OTTO platform users can learn more on the OTTO Support Center (login required). If access is required,... -
Page 17: Attachment Interfaces
OTTO 750 V2 - OMM-000096-A Manual mode While controlling the OTTO 750 autonomous mobile robot (AMR) using its pendant, there are no speed restrictions and the safety field sets monitored by the LiDAR are disabled. There is a collision risk with objects while driving the OTTO 750 in manual mode. -
Page 18: Footprint Safety
OTTO 750 V2 - OMM-000096-A Footprint safety It should be noted that the overall profile including any attachment, payload, or combination thereof of the robot must remain within its safety configuration—this is measured by the projection of any part that has been extended outside the robot projected to the floor. -
Page 19: Introduction
OTTO 750 V2 - OMM-000096-A navigation and localization to plan their motion. They can perform autonomous navigation and route planning to achieve their planned jobs and will operate without direct user intervention. Operators are intended to have suitable training or familiarization as needed for their interactions with the robots and systems. - Page 20 OTTO 750 V2 - OMM-000096-A IMPORTANT No field modifications of the robot that influence the performance or safety of the robot are permitted. This includes, but is not exclusive to, modifications that affect the physical size, mass, or floor traction of the robot. No modifications may be carried out that affect the integrated sensors or internal electronics.
-
Page 21: Applicable Documents
Reference Number OTTO 750 V2 operation and maintenance manual OMM-000096 OTTO 750 V2 stability and center of gravity ICD-000105 OTTO 750/1500 Fast Charger V2 operation and maintenance manual OMM-000091 Default OTTO 750 V2 safety configuration 025175... -
Page 22: Otto 750 V2 Specifications
OTTO 750 V2 - OMM-000096-A Lock-out/tag-out the robot and confirm lock-out/tag-out functionality by attempting to start up the robot. The robot should not start up while locked-out/tagged-out. Remove the lock-out/tag-out, start up the robot, and confirm that the robot enters an emergency stop state. -
Page 23: Speed And Performance
OTTO 750 V2 - OMM-000096-A 7.2. Speed and performance Component Specification Maximum total payload 1250 kg (2750 lbs) total maximum payload Credentialed OTTO platform users can learn more on the OTTO Support Center (login required). If access is required, contact OTTO Motors Support and they will be happy to answer any questions or provide access. -
Page 24: Control System
OTTO 750 V2 - OMM-000096-A Component Specification Maximum charge rate Robots manufactured before serial number B10-001121011 100 A Robots manufactured after serial number B10-001121011 80 A Battery dimensions (L x W x 969 x 364 x 291 (38.15 x 14.33 x 11.46 in) -
Page 25: Operating Environment
OTTO 750 V2 - OMM-000096-A Component Specification Human-robot interaction 4 x Emergency Stop buttons Safety Reset button Power button 7.6. Operating environment Component Specification Autonomous mode maximum 1° (1.7 %) floor slope Floor obstacle maximums Obstacle height: 16 mm (0.63 in) Floor gap: 16 mm (0.63 in) -
Page 26: Components Overview
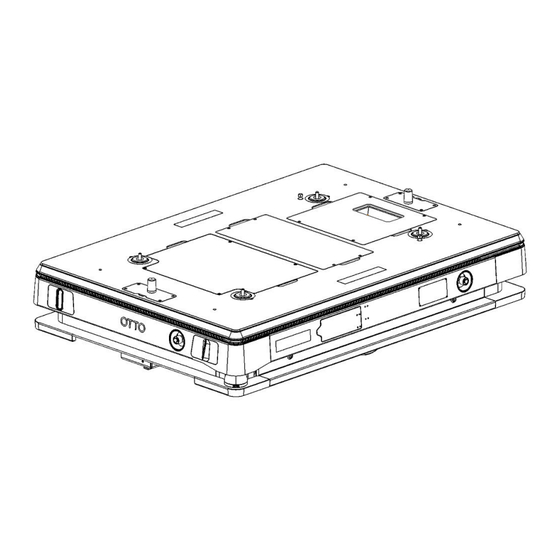
OTTO 750 V2 - OMM-000096-A 8. Components overview The components overview is intended to familiarize users with the separate product components. 8.1. Components Attachment interface/electronics bay Attachment mounting and lift points WiFi antenna Emergency Stop button Lock-out/tag-out bay Safety Reset button ©... -
Page 27: Emergency Stop Buttons
OTTO 750 V2 - OMM-000096-A Power button LiDAR safety scanner 3D perception camera Manual bypass slots (screws shown) Pendant and manual charge port bay Light pipe Battery bay Drive bay 8.2. Emergency Stop buttons The Emergency Stop buttons on the robot that can be used to trigger an emergency stop state on the robot. -
Page 28: Safety Reset Button
OTTO 750 V2 - OMM-000096-A WARNING • SHOCK HAZARD! Always perform the lock-out/tag-out procedure at the facility or on the product before inspecting, servicing, cleaning, removing components, or opening any enclosure. • SHOCK HAZARD! Improper use or maintenance of robot batteries may result in a high energy discharge. -
Page 29: Pendant And Manual Charge Port Bay
OTTO 750 V2 - OMM-000096-A 8.7. Pendant and manual charge port bay The pendant and manual charge bay is a triple-purpose bay that allows operators to connect the manual charger or the pendant used for manual control of the robot, and includes storage for the manual bypass screws when they are not in use. - Page 30 OTTO 750 V2 - OMM-000096-A Name Description Visual indication Reversing The robot is reversing. Rear solid dull white in direction of travel Front solid red with dull white Turning The robot is turning. Side blinking yellow in turn direction About to...
- Page 31 OTTO 750 V2 - OMM-000096-A Name Description Visual indication Hazard The robot is entering what it considers a Front solid dull white narrow pathway. Rear solid red Safety fields Blinking yellow stripes are reduced in size. WARNING CRUSH HAZARD! Pedestrians should be aware of hazard mode or docking mode audio-visual indications.
-
Page 32: Speakers
OTTO 750 V2 - OMM-000096-A Name Description Visual indication Emergency The robot has stop entered an emergency Full flashing red stop state. Failed target The robot has find failed find its target—for Front solid dull white example, a dock or cart. -
Page 33: Wifi Radio Antennas
OTTO 750 V2 - OMM-000096-A WARNING • IMPACT HAZARD! Never bypass the drive wheels of the robot while on a sloped surface. • IMPACT HAZARD! Never leave manual bypass screws installed. This can prevent the braking system from functioning properly and can cause unpredictable driving patterns. -
Page 34: Perception Cameras
OTTO 750 V2 - OMM-000096-A CAUTION CRUSH or IMPACT HAZARD! Keep low profile objects that the LiDAR cannot detect, such as forklift tines and pallets, outside of the robot's path. For sensor layouts, refer to the Component Overview section of the robot operation and maintenance manual. -
Page 35: Attachment Mounting And Lift Points
OTTO 750 V2 - OMM-000096-A 8.18. Attachment mounting and lift points The attachment mounting and lift points are used to hoist the robot for transport and unboxing and mount attachments mechanically to the robot chassis. See attachment interface documentation for more detail. These documents are available on the OTTO Support Center at help.ottomotors.com. -
Page 36: Unboxing
OTTO 750 V2 - OMM-000096-A 9. Unboxing Selection and implementation of the lifting method appropriate for the situation, and liability therefor, remains the sole responsibility of the user. Only certified forklift operators should attempt lifting the robot. WARNING • Always use level rigging when lifting or lowering the product. -
Page 37: Lock-Out/Tag-Out
OTTO 750 V2 - OMM-000096-A 10.1. Lock-out/tag-out CAUTION SHOCK HAZARD! Always perform the lock-out/tag-out procedure at the facility or on the product before inspecting, servicing, cleaning, removing components, or opening any enclosure. All personnel working on the platform must connect their own lock. -
Page 38: First Start-Up
OTTO 750 V2 - OMM-000096-A 10.2. First start-up WARNING IMPACT HAZARD! Never bypass the drive wheels of the robot while on a sloped surface. CAUTION Only use the attachments, accessories, tools, replacement parts, and cleaning products approved by OTTO. Prior to operating the robot for the first time, it is important to perform a hardware operational check to determine if there is any hardware damage or defects caused during shipping. -
Page 39: Starting Up
If the robot takes between 60 seconds and 6 minutes to boot, it is possible that there is a networking error preventing the boot up sequence. If the robot takes more than 6 minutes to boot or never indicates an emergency stop state during start up, contact OTTO Motors Support for assistance. 10.4. Shutting down Note that when cycling power, the robot should be given at least 5 minutes between each state change (power on or power off). -
Page 40: Moving
OTTO 750 V2 - OMM-000096-A Do NOT attempt to lock-out/tag-out the robot before shutting down the robot or if the robot is charging (manually or autonomously). IMPORTANT If the robot setup includes the OTTO 750/1500 Fast Charger V22, robots will be sent to charge autonomously without human intervention. -
Page 41: Manually Bypassing Drive Wheels
OTTO 750 V2 - OMM-000096-A CAUTION Use appropriately rated lift equipment and follow safe lifting procedures as defined by the facility when lifting the product. The robot is equipped with lift locations as seen in the Components Overview [26]. Only these points should be used to lift or orient the platform. -
Page 42: Connecting A Robot To A Network
5 GHz wireless frequencies. 5 GHz is strongly recommended as the 2.4 GHz frequency may result in performance issues. If 2.4 GHz is required for the robot to connect, contact OTTO Motors Support for assistance in changing the robot's settings. -
Page 43: Otto App
OTTO 750 V2 - OMM-000096-A Under VPN Settings, enter the OTTO Fleet Manager Hostname (or IP). If, and only if the network has a functional DNS setup, the OTTO OTTO Fleet Manager hostname may be used instead of the IP address. -
Page 44: Changing Otto Amr Settings
OTTO 750 V2 - OMM-000096-A The URL used to access OTTO App should use the same hostname or IP address that was entered during the robot's network configuration. For example: OTTO App for a robot with the following name and IP address can be accessed using either... -
Page 45: Robot Driving Modes
OTTO 750 V2 - OMM-000096-A Robot driving modes There are several driving modes for each robot: autonomous, remote (drive assist on/off), and manual mode. The table below explains how each driving mode works. Driving mode Definition Autonomous In autonomous mode, the robot can drive to a set destination and perform movements between targeted mode [46] locations without remote controls or teleoperation input to maneuver it. - Page 46 OTTO 750 V2 - OMM-000096-A Select Settings Select the Manual toggle to activate remote mode. A white joystick will appear. IMPORTANT If Drive Assist is enabled and a robot has no current goal, the Drive Mode toggle will display Assisted mode instead of Manual mode. If Drive Assist is enabled and the robot has an existing goal, the Drive Mode toggle will put the robot into remote mode, allowing one to perform goal recovery with the joystick.
- Page 47 OTTO 750 V2 - OMM-000096-A IMPORTANT Robots require at least a 30% Localization Score with their environment to be operated autonomously. The robot may be set to neutral mode. Confirm the position of the robot on the map is accurate and select Yes.
-
Page 48: Driving Using The Pendant
OTTO 750 V2 - OMM-000096-A If at least one Endpoint is configured, a robot can be sent directly to it where Tasks associated with the Endpoint will be executed. Launch OTTO App for the applicable robot. In OTTO App, select Main Menu >... -
Page 49: Preventative Maintenance
OTTO 750 V2 - OMM-000096-A The pendant directional buttons are dual-acting (two depressed states). The first level of depression allows the robot to move at slow speed and the second level allows movement at a faster speed. The black enable button is a double-pole design allowing for 3 unique positions. The robot is only able to be manually driven using the pendant when the enable button is pressed to the middle ON position. -
Page 50: Maintenance Schedule
OTTO 750 V2 - OMM-000096-A CAUTION • PINCH HAZARD! Keep objects and body parts away from pinch points. • Only qualified personnel should perform installations, maintenance, and inspections. Take special care while maintaining and inspecting electrical equipment and devices. All personnel working on or around the system are to be aware of, and adhere to, all CAUTION, DANGER, and WARNING labels. -
Page 51: Weekly Preventative Maintenance
OTTO 750 V2 - OMM-000096-A CAUTION SHOCK HAZARD! Always perform the lock-out/tag-out procedure at the facility or on the product before inspecting, servicing, cleaning, removing components, or opening any enclosure. See the Components Overview [26] for more detail on LiDAR safety scanner locations. -
Page 52: Battery Calibration
OTTO 750 V2 - OMM-000096-A Battery calibration The function and health of the robot battery is monitored by a Battery Management Unit (BMU) which is internal to the battery pack itself. Over the operating life of the robot, the State of Charge (SoC) of the battery may drift from what is being calculated by the BMU. - Page 53 OTTO 750 V2 - OMM-000096-A Changing the robot mode IMPORTANT Confirm that the localization of the robot on the map is correct before engaging Autonomous Mode. Failure to do so could result in the robot entering Exclusion Zones or ignoring map features, potentially resulting in damaging the robot and/or property.
-
Page 54: Monthly Preventative Maintenance
If the robot continues to experience issues with battery performance after completing this calibration procedure, contact OTTO Motors Support for further direction. 11.4. Monthly preventative maintenance Perform the following tasks at least once each month. -
Page 55: Exterior Cleaning
OTTO 750 V2 - OMM-000096-A Exterior cleaning Required materials • Lint-free cloth or scratch-free sponge, dampened with water Shut down the robot [39]. Using the lint-free cloth/scratch-free sponge, gently remove any dust or debris from the exterior of the robot. - Page 56 OTTO 750 V2 - OMM-000096-A • Laptop or tablet connected to the same network as the robot For robots manufactured before serial number B10-001121011 (unless retrofit), the cell balancing is performed by charging the battery with the OTTO 750/1500 Fast Charger V2 at 2.5 C (100 amps (A)) in the constant current (CC) mode of the charge cycle.
- Page 57 OTTO 750 V2 - OMM-000096-A Robot mode Description Unavailable The robot is not being managed by OTTO and will not be sent any commands. IMPORTANT Changing the robot unavailable mode to will clear its payload ID and any other data associated with it.
-
Page 58: Disposal
If the robot continues to experience issues with battery performance after completing this calibration procedure, contact OTTO Motors Support for further direction. 12. Disposal Always observe valid environmental protection regulations. -
Page 59: Troubleshooting
Contact OTTO Motors Support for instructions on diagnosing a blown traction motor fuse. © Clearpath Robotics Inc. 2023. All rights reserved. CLEARPATH and OTTO are trademarks of Clearpath Robotics Inc. -
Page 60: Appendix
OTTO 750 V2 - OMM-000096-A 14. Appendix © Clearpath Robotics Inc. 2023. All rights reserved. CLEARPATH and OTTO are trademarks of Clearpath Robotics Inc. All other product and company names listed are trademarks or trade names of their respective companies.
Need help?
Do you have a question about the 750 V2 and is the answer not in the manual?
Questions and answers